
giriiş
Önceki Ünitede, VEXcode EXP'de 6 Eksenli Robotik Kol ile manuel hareketleri öğrendiniz ve Teach Pendant ile CTE Döşeme konumlarının koordinatlarını buldunuz.
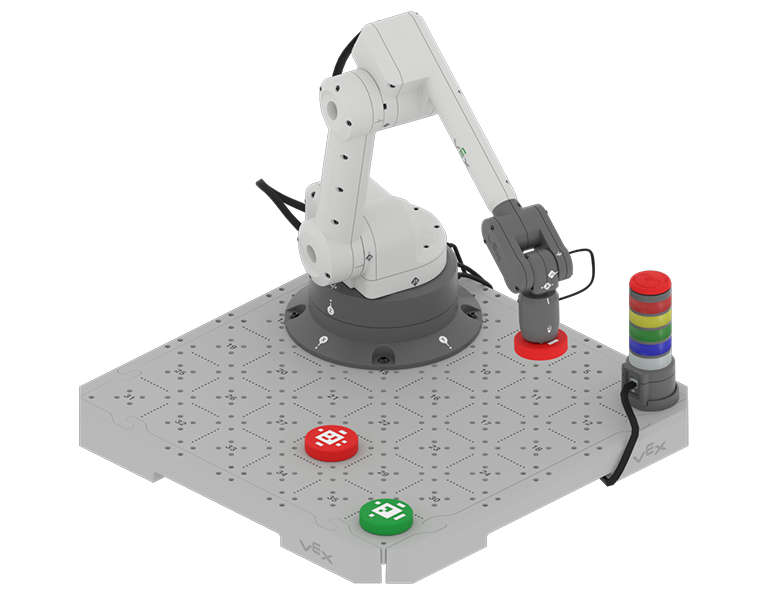
Bu Ünitede, Öğretim Kolyesi hakkında daha fazla bilgi edinecek ve Mıknatıs Alma Aracını nasıl kullanacağınızı öğreneceksiniz, böylece Döşemedeki Diskleri alıp hareket ettirebilirsiniz.
Bu Ünitede neler öğreneceğinize dair genel bir bakış için aşağıdaki tanıtım videosunu izleyin.
Öğrenme Hedeflerini Birlikte Oluşturun
Artık videoyu izlediğinize göre, 6 Eksenli Kolu Mıknatıs Alma Aleti ile Diskleri almak ve taşımak için Öğretme Kolyesini kullanacağınızı biliyorsunuz. Öncelikle öğretici kolyelerin ne olduğunu ve endüstride nasıl kullanıldığını ve ayrıca VEXcode'daki Öğretici Kolye üzerindeki özelliklerin nasıl kullanılacağını öğreneceksiniz. Ayrıca Mıknatıs gibi uç efektörleri ve bir Diski almak ve taşımak için nasıl kullanılabileceğini de öğreneceksiniz. Ardından, üç Diski Karo üzerindeki yeni konumlara taşımak için Öğretme Kolyesini kullanmak için hepsini bir araya getireceksiniz. Bu görevleri yerine getirmek için bilmeniz ve öğrenmeniz gerekenleri düşünün.
Bu hedefleri yakalamak için grubunuz ve öğretmeninizle birlikte öğrenme hedefleri oluşturacaksınız, böylece Ünite için öğrenme hedefleriniz hakkında ortak bir anlayışa sahip olacaksınız. Öğrenme hedeflerinizi mühendislik defterinize yazacaksınız, böylece Ünite genelinde bunlara başvurabilirsiniz.
Öğrenme hedeflerini “yapabilirim” şeklinde ifade etmek faydalı olacaktır. Bu Ünite için örnek öğrenme hedefleri şunları içerebilir:
- Öğretme Kolyesi ile Mıknatısın nasıl etkinleştirileceğini ve serbest bırakılacağını belirleyebilirim.
- 6 Eksenli Kolu x, y ve z eksenleri boyunca hareket ettirmek için Öğretme Kolyesini kullanabilirim.
- Bir Diski 6 Eksenli Kolu bir yerden başka bir yere taşımak için Öğretme Kolyesini kullanabilirim.
Öğrenme hedeflerinizi oluşturmak için önce yukarıdaki videoda gösterilen etkinlikleri tamamlayabilmek için bilmeniz gerekenler hakkında beyin fırtınası yapın. Mühendislik defterinizde bilmeniz, öğrenmeniz ve yapmanız gerekenlerin bir listesini yapın:
- 6 Eksenli Kolun hareketini durdurun.
- 6 Eksenli Kolu x ekseni boyunca hareket ettirin.
- 6 Eksenli Koldaki Mıknatısı etkinleştirin.
- Teach Pendant'ın özelliklerini mühendislik defterimde belgeleyin.
- Etkinliği işbirliği içinde tamamlamak için grubumla birlikte çalışın.
Ardından, listenize göre öğrenme hedeflerini birlikte oluşturun. "Yapabilirim" ifadelerini kullanarak listelediğiniz şeylerin her birinin bir öğrenme hedefi olarak nasıl çerçevelenebileceğini düşünün. Öğrenme hedeflerinizi mühendislik defterinize yazmanıza yardımcı olması için bu şablonu kullanabilirsiniz. (Google Doküman / .docx / .pdf)
Örneğin, "6 Eksenli Kolu x ekseni boyunca hareket ettirin" liste öğesi, 6 Eksenli Kolu x , y ve z eksenleri boyunca hareket ettirmek için Öğretme Kolyesini kullanabileceğim öğrenme hedefine kaydırılabilir.
Aşağıdaki tablo, mühendislik defterinizdeki Öğrenme Hedefi Düzenleyicisinin nasıl doldurulabileceğine dair bir örnek göstermektedir.
| Öğrenme Hedefi Kategorisi | Öğrenme Hedefleri |
|---|---|
|
Bilgi Hedefleri Ünitede başarılı olmak için bilmem ve anlamam gerekenler nelerdir? |
|
|
Muhakeme Hedefleri Birimde başarılı olmak için bildiklerim ve anladıklarımla ne yapabilirim? |
|
|
Beceri Hedefleri Ünitede başarılı olmak için gereken kavramları ve becerileri anladığımı göstermek için ne gösterebilirim? |
|
Öğrenme hedeflerinizi öğretmeninizle paylaşın. Siz, grubunuz ve öğretmeniniz hemfikir olacak şekilde bunları gerektiği gibi ayarlayın.
Sözcük dağarcığı
Bu Ünitede, öğretme kolyeleri ve uç efektörleri hakkında bilgi edineceksiniz, böylece 6 Eksenli Kol ile Diskleri hareket ettirmek için VEXcode EXP'deki Öğretme Kolyesini kullanabilirsiniz. Bu kelime listesi, karşılaşabileceğiniz yeni terimler için referans sağlamak amacıyla hazırlanmıştır. Bu kelime dağarcığını mühendislik defterinize kaydedin. Ünite üzerinde çalışırken ve aşina olmadığınız kelimelerle karşılaştığınızda bu listeyi referans olarak kullanın.
- Son Efektör
- Çevreyle etkileşime girmek için tasarlanmış bir robotik kolun ucundaki cihaz; Kol Sonu Aletleri (EOAT) olarak da bilinir.
- Koşu
- Bir robotik kolu, tipik olarak küçük, hassas hareketlerle, bir kontrol arayüzü (Teach Pendant gibi) kullanarak belirli yönlerde kademeli olarak hareket ettirme işlemidir.
- Teach Pendant
- Bir robot kolunun hareketlerini manuel olarak kontrol etmek için kullanılan bir cihazdır.
| Adet | Gerekli Malzemeler |
|---|---|
| Grup başına 1 |
CTE Workcell Kiti |
| Grup başına 3 |
Diskler |
| Grup başına 1 |
Bilgisayar |
| Grup başına 1 |
VEXcode EXP |
| Öğrenci başına 1 |
Mühendislik Defteri |
Teach Pendant hakkında bilgi edinmek içinİleri > seçin.