
खेल
भाग 1 - चरण दर चरण
- निर्देशविद्यार्थियों को निर्देश दें कि वे एक पहिया घुमाव में कोड बेस द्वारा तय की जाने वाली दूरी को मापने जा रहे हैं। फिर वे उस जानकारी का उपयोग अपने रोबोट को परेड मार्ग की पूरी लंबाई में सटीक रूप से चलने के लिए कोड करने की योजना बनाने के लिए करेंगे।
शिक्षक की प्रतिक्रिया और पूछताछ के साथ संयोजन में एक पहिया मोड़ की दूरी को मापने के छात्रों के अनुभव से छात्रों को यह एहसास होना चाहिए कि वे इस जानकारी का उपयोग पूरे परेड मार्ग में पहिया मोड़ों की संख्या निर्धारित करने के लिए कर सकते हैं, और फिर उस जानकारी को [स्पिन फॉर] ब्लॉक में इनपुट कर सकते हैं जब वे बाद में लैब में अपना कोड बनाते हैं। सुझावों के लिए सुविधा अनुभाग देखें। - मॉडलछात्रों के लिए एक पहिया मोड़ की दूरी को मापने के लिए कैसे सेट अप करें, इसके लिए मॉडल। नीचे दिए गए एनीमेशन को देखें कि कैसे पहिये को रूलर पर संरेखित करें और पहिये के घुमाव को मापने के लिए उसे घुमाएं। एनीमेशन में पहिये पर एक स्टैंडऑफ लगाया गया है जो यह बताता है कि पहिये ने कितना चक्कर लगाया है, तथा एक पूर्ण चक्कर के बाद दूरी मापने के लिए एक रेखा दिखाई गई है।
वीडियो फाइल
- छात्रों को एक पहिये के घुमाव की दूरी मापने के लिए निम्नलिखित चरणों का उपयोग करना चाहिए (जैसा कि ऊपर वीडियो में दिखाया गया है)।
-
सबसे पहले, कोड बेस से एक ग्रे व्हील निकालें और एक ब्लू स्टैंडऑफ जोड़ें। आप पहिये के एक चक्कर को देखने के लिए इसका उपयोग दृश्य मार्गदर्शिका के रूप में करेंगे।

नीले स्टैंडऑफ़ को ग्रे व्हील में डालें - फिर, स्टैंडऑफ को कागज़ के एक टुकड़े या मापने वाले उपकरण पर अंकित प्रारंभिक बिंदु के साथ संरेखित करें।
- इसके बाद, अपने हाथों का उपयोग करके पहिये को तब तक घुमाएं जब तक कि ब्लू स्टैंडऑफ एक चक्कर पूरा करके प्रारंभिक बिंदु पर वापस न आ जाए।
- अंत में, दूरी नापें और उसे लिख लें। यह वह दूरी है जो रोबोट पहियों के एक चक्कर से तय कर लेगा।
- विद्यार्थियों को माप को निकटतम सौवें भाग तक पूर्णांकित करना चाहिए।
- इसमें थोड़ा अलग माप हो सकता है। निम्नलिखित एक उदाहरण है: (1 मोड़ = 6.25 इंच (16 सेमी))
- यदि छात्र भिन्न या दशमलव से अपरिचित हैं तो वे 6 इंच तक पूर्णांक बना सकते हैं। ध्यान दें कि इससे कोड बेस कितनी दूर तक ड्राइव करेगा इसकी सटीकता पर प्रभाव पड़ेगा
-
- छात्रों को एक पहिये के घुमाव की दूरी मापने के लिए निम्नलिखित चरणों का उपयोग करना चाहिए (जैसा कि ऊपर वीडियो में दिखाया गया है)।
- सुविधा प्रदान करनाविद्यार्थियों के साथ बातचीत को सुविधाजनक बनाना ताकि उन्हें अपने विचार साझा करने का अवसर मिले और वे इस बात को समझ सकें कि वे परेड मार्ग की सटीक दूरी तय करने के लिए रोबोट को कोड करने की योजना बनाने के लिए एक पहिया मोड़ की दूरी का उपयोग कैसे करेंगे।
जब छात्र काम कर रहे हों, तो उनसे प्रश्न पूछें और फीडबैक दें, ताकि उन्हें माप पूरा करने में मदद मिल सके, साथ ही उन्हें यह समझने में मार्गदर्शन भी मिले कि वे इस माप का उपयोग रोबोट को सटीक दूरी तय करने के लिए कोड करने में कैसे कर सकते हैं।
- आपके पहिये का एक चक्कर कितने इंच या सेंटीमीटर का था?
- यदि आपका पहिया एक बार घूमने पर एक निश्चित दूरी (6.25 इंच या 16 सेमी) तय करता है, तो दो बार घूमने पर यह कितनी दूरी तय करेगा? तीन?
- अब जब आप एक पहिये के घूमने की दूरी जानते हैं, तो हम इस जानकारी का उपयोग रोबोट को सम्पूर्ण परेड मार्ग (48 इंच या 122 सेमी) तय करने के लिए कोड करने में कैसे कर सकते हैं?
- याद दिलाएंविद्यार्थियों को याद दिलाएं कि चूंकि यह एक खुली गतिविधि है, इसलिए समूह के सदस्यों के विचार समान नहीं हो सकते हैं, और समस्या-समाधान दृष्टिकोण पर सहमति बनाने की प्रक्रिया को अपनाना महत्वपूर्ण है।
- आपके समूह के पास इस बारे में क्या विचार थे कि एक पहिये के घूमने की दूरी मापने से जो सीखा गया था, उसका उपयोग करके रोबोट को सम्पूर्ण परेड मार्ग पर यात्रा करने के लिए कोड करने में कैसे मदद की जाए?
- आपने कौन सा समाधान चुना और क्यों?
- यदि आपके विचार अलग-अलग थे, तो आप इस बात पर कैसे सहमत हुए कि कौन सा समाधान सर्वोत्तम है?
- पूछेंविद्यार्थियों से पूछें कि दूरियों को मापना और गणना करना उनके दैनिक जीवन में किस प्रकार उपयोगी हो सकता है।
- क्या आपको कभी किसी रास्ते का नक्शा बनाना पड़ा है या एक स्थान से दूसरे स्थान तक जाने का रास्ता खोजना पड़ा है? आपने दूरियों को कैसे मापा और गणना की?
- दूरियां मापने के लिए आप अन्य कौन से उपकरण उपयोग कर सकते हैं?
खेल के बीच में ब्रेक & समूह चर्चा
जैसे ही प्रत्येक समूह परेड मार्गकी लंबाई के अनुसार अपने कोड बेस को चलाने के लिए आवश्यक मोड़ों की संख्या की गणना करने का समय मिल जाता है, वे संक्षिप्त बातचीत के लिए एक साथ आ जाते हैं।
विद्यार्थियों को अपने समाधान और तरीके साझा करने का अवसर दें। यह समय छात्रों की समझ की जांच करने और उनकी किसी भी गलत धारणा को दूर करने का है। उन्हें इन संकेतों के माध्यम से अपने विचार साझा करने के लिए मार्गदर्शन करें:
- आपके समूह ने एक पहिये के घूमने की दूरी का माप क्या किया?
- आपके समूह ने इस जानकारी का उपयोग यह जानने के लिए कैसे किया कि सटीक दूरी तय करने के लिए आपके रोबोट को कोड करने हेतु [स्पिन फॉर] ब्लॉक में पैरामीटर में कितने पहिया घुमावों की आवश्यकता होगी?
- आपको क्यों लगता है कि यह सबसे अच्छा समाधान है?
भाग 2 - चरण दर चरण
- निर्देशछात्रों को निर्देश दें कि वे परेड में भाग लेने के लिए अपने कोड बेस को कोड करने के लिए प्ले पार्ट 1 से अपने समाधानों का उपयोग करने जा रहे हैं! वे सबसे पहले अपना VEXcode GO प्रोजेक्ट बनाएंगे, और पहियों के घुमावों की संख्या दर्ज करेंगे। फिर, वे कोड बेस के साथ अपने प्रोजेक्ट का परीक्षण करेंगे। यदि उनकी गणना सही रही तो उनका रोबोट परेड मार्ग की पूरी लंबाई तक गाड़ी चलाएगा। निम्नलिखित वीडियो में दिखाया गया है कि परेड में चलते समय कोड बेस को किस प्रकार चलना चाहिए। एनीमेशन में कोड बेस पांच जुड़ी हुई टाइलों के बीच से सीधे गुजरता है, और जब वह अंत तक पहुंचता है तो एक रेखा दिखाई देती है जो यह बताती है कि उसने कितनी दूरी तय की है।
वीडियो फाइल
- मॉडलछात्रों के लिए मॉडल कि वे VEXcode GO में अपने प्रोजेक्ट कैसे शुरू करें।
- छात्रों को यह दिखाकर शुरुआत करें कि वे अपने कोड बेस पर स्थित ब्रेन को VEXcode GO में अपने डिवाइस से कैसे कनेक्ट करें। चूंकि डिवाइसों के बीच कनेक्शन के चरण अलग-अलग होते हैं, इसलिए VEX GO ब्रेन को अपने कंप्यूटर या टैबलेट से कनेक्ट करने के विशिष्ट चरणों के लिए VEXcode GO से कनेक्ट करना लेखपर अनुभाग देखें।
- एक बार कनेक्ट होने के बाद, वे परेड फ्लोट उदाहरण प्रोजेक्ट खोलेंगे और अपने प्रोजेक्ट की कोडिंग शुरू करेंगे। ऐसा करने के लिए, टूलबार से 'फ़ाइल' चुनें, फिर 'उदाहरण खोलें' चुनें। फिर, 'परेड फ्लोट' उदाहरण परियोजना का चयन करें।
-
VEXcode GO में परेड फ्लोट उदाहरण प्रोजेक्ट को खोलने का तरीका जानने के लिए नीचे दिया गया वीडियो देखें। GO टूलबार में फ़ाइल मेनू खोला जाता है और ड्रॉपडाउन से चौथे आइटम पर क्लिक किया जाता है जिस पर लिखा होता है 'ओपन उदाहरण'। GO उदाहरण प्रोजेक्ट्स मेनू खुलता है और परेड फ्लोट प्रोजेक्ट का चयन और लोड किया जाता है।
वीडियो फाइल - यदि छात्रों को अतिरिक्त सहायता की आवश्यकता है, तो उन्हें उदाहरण परियोजनाओं और टेम्पलेट्स का उपयोग करने के निर्देश के लिए VEXcode GO में उदाहरणों का उपयोग ट्यूटोरियल देखने को कहें।
-
उदाहरणों का उपयोग ट्यूटोरियल - फिर, उन्हें प्ले पार्ट 1 से अपने समाधान को [स्पिन फॉर] ब्लॉक के मापदंडों में इनपुट करने को कहें।

परेड फ्लोट लैब 4 प्रोजेक्ट स्टार्टर - छात्रों को अपने प्रोजेक्ट का नाम परेड फ्लोट लैब 4 रखने और उसे अपने डिवाइस में सेव करने को कहें। VEXcode GO प्रोजेक्टको सहेजने के लिए डिवाइस-विशिष्ट चरणों के लिए VEXcode GO STEM लाइब्रेरी के खोलें और सहेजें अनुभाग देखें।
छात्रों के लिए मॉडल प्रस्तुत करें कि वे परेड मार्ग पर अपने प्रोजेक्ट का परीक्षण कैसे करें।
नोट: सुनिश्चित करें कि आप ब्लॉक के "और प्रतीक्षा न करें" को खुला रखें, अन्यथा आपका प्रोजेक्ट अपेक्षा के अनुरूप नहीं चलेगा क्योंकि दूसरा मोटर ब्लॉक तब तक प्रतीक्षा करेगा जब तक कि पहला ब्लॉक समाप्त नहीं हो जाता।
-
सबसे पहले, उन्हें दिखाएं कि अपने रोबोट को शुरुआती बिंदु पर कैसे रखें, जैसा कि नीचे दी गई छवि में दिखाया गया है। पहिये के केंद्र को प्रारंभिक रेखा के सामने के किनारे के साथ संरेखित करने में मदद के लिए पहिये पर नीले स्टैंडऑफ का उपयोग करें।
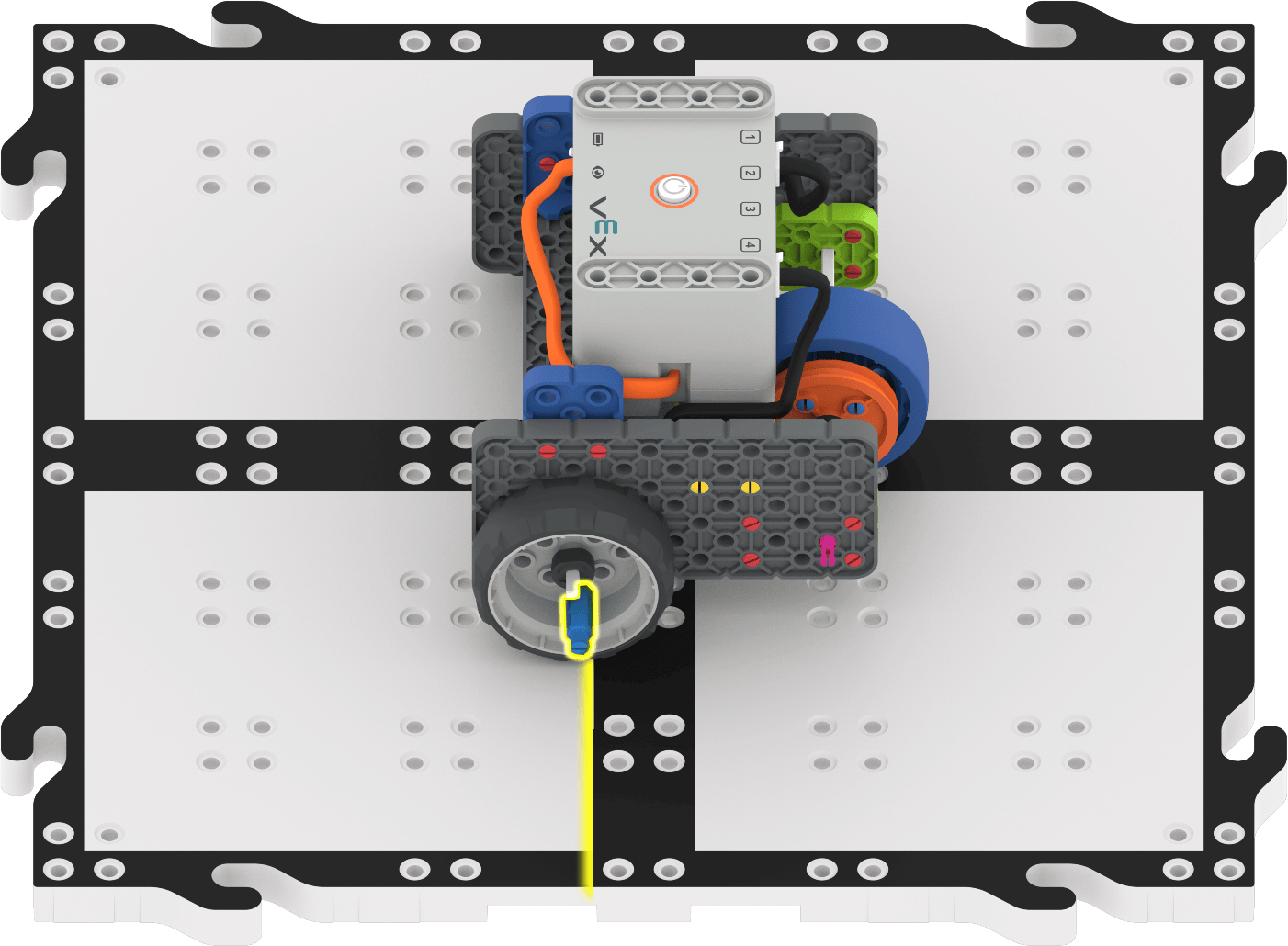
ब्लू स्टैंडऑफ़ का उपयोग करके परेड मार्ग की शुरुआत में कोड बेस को संरेखित करना - एक बार कोड बेस स्थापित हो जाने पर, प्रोजेक्ट का परीक्षण करने के लिए VEXcode GO में 'प्रारंभ' का चयन करें।
प्रोजेक्ट परीक्षण करने के लिए प्रारंभ चुनें- छात्रों को प्रोजेक्ट को रोकने के लिए VEXcode GO टूलबार में 'स्टॉप' बटन का चयन करना होगा।
- विद्यार्थियों को अपनी परियोजनाओं का परीक्षण करने, उन्हें अद्यतन करने तथा यदि आवश्यक हो तो पुनः परीक्षण करने का समय दें।
- जब छात्रों को परेड मार्ग पर अपनी परियोजनाओं का परीक्षण करने का अवसर मिल जाए, तो उन्हें अपने परेड फ्लोट संलग्नक को कोड बेस में जोड़ने को कहें तथा पूरी कक्षा की परेड में भाग लेने को कहें, जहां सभी समूह बारी-बारी से अपनी परियोजनाएं चलाएंगे।
- जो छात्र जल्दी पढ़ाई पूरी कर लेते हैं और उन्हें अतिरिक्त चुनौतियों की आवश्यकता होती है, उन्हें अपने रोबोट को अधिक दूरी तक चलाने के लिए कोड करने को कहें। विद्यार्थियों को निम्नलिखित परिदृश्य दीजिए:
- परेड मार्ग को 60 इंच (152 सेमी) तक बढ़ा दिया गया है। क्या आपका कोड अभी भी काम करता है? कोड बेस को नए परेड मार्ग की पूरी लंबाई तक चलाने के लिए आपको क्या परिवर्तन करना होगा?
- सुविधा प्रदान करनाछात्रों के साथ बातचीत को सुविधाजनक बनाना, जब वे अपने प्रोजेक्ट बनाते और परीक्षण करते हैं, जैसे कि:
- क्या आपके रोबोट ने सही दूरी तय की? क्यों या क्यों नहीं?
- आप [स्पिन फॉर] ब्लॉक में क्या जानकारी इनपुट कर रहे हैं? यह संख्या कहां से आई?
छात्रों को अपनी परियोजनाओं का परीक्षण करते समय समस्या निवारण रणनीतियों में सहायता प्रदान करें। छात्र अनिवार्य रूप से अपने काम की जांच करने के लिए कोड बेस का उपयोग कर रहे हैं, और ऐसा करते समय, उन्हें यह सुनिश्चित करना होगा कि उन्होंने आवश्यक घुमावों की सही संख्या की गणना की है, और उस जानकारी को [स्पिन फॉर] ब्लॉक में सही ढंग से इनपुट किया है। जब छात्र काम कर रहे हों तो प्रश्न पूछें और फीडबैक दें, लेकिन जब आप इस प्रयोगशाला में गतिविधि संचालित कर रहे हों तो छात्रों को उत्तर देने से बचें। छात्रों को काम करते समय मार्गदर्शन देने तथा उत्तर दिए बिना प्रभावी फीडबैक देने की रणनीतियों के लिए यह लेख देखें।
यदि कोड बेस पर्याप्त दूर तक नहीं जाता है या बहुत दूर तक चला जाता है, तो छात्रों को [स्पिन फॉर] ब्लॉक के इनपुट की जांच करने दें, और सुनिश्चित करें कि वे अपने समाधान सही ढंग से इनपुट करते हैं।
- क्या [स्पिन फॉर] ब्लॉक का मान आपके समाधान के समान है? क्या दशमलव सही स्थान पर है?
- क्या दोनों [स्पिन फॉर] ब्लॉकों में मान समान हैं?
यदि कोड बेस सही दूरी तय नहीं करता है और सभी इनपुट सटीक हैं, तो इसका मतलब है कि उनका समाधान (पहियों के घुमावों की आवश्यक संख्या) गलत है। उन्हें प्ले भाग 1 से अपनी गणना की जांच करने के लिए मार्गदर्शन करें।
माप की प्रयुक्त इकाइयों के आधार पर या माप को पूर्णांकित करते समय मामूली भिन्नता के कारण समाधान में भिन्नता हो सकती है। निम्नलिखित समाधान का एक उदाहरण है।
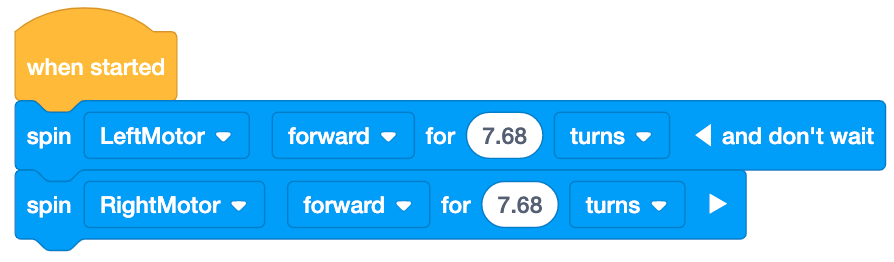
संभावित समाधान - याद दिलाएंविद्यार्थियों को याद दिलाएं कि उनके प्रोजेक्ट को पूरा करने के लिए कई प्रयास करने पड़ सकते हैं। उन्हें याद दिलाएं कि परीक्षण और त्रुटि परीक्षण प्रक्रिया का एक हिस्सा है, और कोडिंग का एक महत्वपूर्ण हिस्सा है।
- क्या आपका रोबोट बहुत दूर चला गया? या फिर पर्याप्त दूरी नहीं? आपको क्या लगता है ऐसा क्यों हुआ?
- कोड बेस ड्राइव को परेड मार्ग की दूरी को अधिक सटीक बनाने के लिए आप अपनी परियोजना में क्या परिवर्तन कर सकते हैं?
- पूछेंविद्यार्थियों से पूछें कि रोबोट को सटीकता से चलाने के लिए कोडिंग करना अन्य क्षेत्रों में कैसे उपयोगी हो सकता है।
- वास्तविक परेड झांकियों के लिए मार्ग की दूरी सही ढंग से तय करना क्यों महत्वपूर्ण है? यदि वे ऐसा न करें तो क्या होगा?
- क्या होगा यदि आपके पास एक ऐसा रोबोट हो जो सटीक दूरी तय कर सके और विशिष्ट मार्गों का अनुसरण कर सके? आप घर पर मदद के लिए इस रोबोट का उपयोग कैसे कर सकते हैं? या स्कूल में?