
Hrát
Část 1 – Krok za krokem
- InstrukceSdělte studentům, že změří vzdálenost, kterou kódová základna urazí po otočení kola. Poté tyto informace použijí k vytvoření plánu, jak naprogramovat své roboty tak, aby se přesně pohybovali po celé délce trasy průvodu.
Zkušenosti studentů s měřením vzdálenosti jednoho otočení kola v kombinaci se zpětnou vazbou a dotazy učitele by měly studenty vést k uvědomění si, že tyto informace mohou použít k určení počtu otočení kola v celé trase průvodu a poté tyto informace zadat do bloků [Spin for], když budou později v laboratoři vytvářet svůj kód. Návrhy naleznete v části Usnadnění. - ModelModel pro studenty, jak nastavit měření vzdálenosti jednoho otočení kola. Podívejte se na animaci níže a uvidíte, jak zarovnat kolo na pravítku a otáčením pravítka změřit otáčku kola. V animaci je ke kolu připevněna distanční vymezovač, který ukazuje, o kolik se kolo otočilo, a po jednom plném otočení se zobrazí čára pro měření vzdálenosti.
Video soubor
- Studenti by měli pomocí následujících kroků změřit vzdálenost otáčky jednoho kola (jak je znázorněno ve videu výše).
-
Nejprve sundejte jedno šedé kolečko ze základny kódu a připojte modrý odstup. Toto budete používat jako vizuální vodítko k zobrazení jednoho otočení kola.

Vložte modrý odstup do šedého kolečka - Poté zarovnejte odstup s počátečním bodem vyznačeným na kusu papíru nebo na měřicím zařízení.
- Dále pomocí rukou otáčejte volantem, dokud modrý standoff nedokončí jednu otáčku a nevrátí se do výchozího bodu.
- Nakonec změřte vzdálenost a zapište si ji. Tak daleko se robot otočí jedním otočením kol.
- Studenti by měli zaokrouhlit naměřené hodnoty na nejbližší setinu.
- Mohou se mírně lišit. Následuje jeden příklad: (1 otáčka = 6,25 palce (16 cm))
- Studenti mohou zaokrouhlit dolů na 6 palců, pokud neznají zlomky nebo desetinná čísla. Všimněte si, že to ovlivní přesnost toho, jak daleko se kódová báze posune.
-
- Studenti by měli pomocí následujících kroků změřit vzdálenost otáčky jednoho kola (jak je znázorněno ve videu výše).
- FacilitovatVeďte se studenty k diskusi, abyste jim dali příležitost podělit se o své myšlenky a pochopit, jak by využili vzdálenost jednoho otočení kola k vytvoření plánu pro naprogramování robota tak, aby urazil přesnou vzdálenost trasy průvodu.
Během práce studentů klaďte otázky a poskytujte jim zpětnou vazbu, která jim pomůže s dokončením měření a zároveň je vede k uvědomění si, jak mohou toto měření použít k naprogramování robota tak, aby se pohyboval o přesnou vzdálenost.
- Kolik palců nebo centimetrů trvalo jedno otočení kola?
- Pokud vaše kolo urazí určitou vzdálenost (6,25 palce neboli 16 cm) při jednom otočení, jakou vzdálenost urazí při dvou otočkách? Tři?
- Nyní, když znáte vzdálenost jednoho otočení kola, jak můžeme tyto informace použít k naprogramování robota tak, aby urazil celou trasu průvodu (48 palců neboli 122 cm)?
- Připomenout studentům, že protože se jedná o otevřenou aktivitu, členové skupiny nemusí mít stejné nápady a že je důležité přijmout proces dosažení dohody o přístupu k řešení problémů.
- Jaké nápady měla vaše skupina ohledně toho, jak využít poznatky z měření vzdálenosti otočení jednoho kola k naprogramování robota tak, aby urazil celou trasu průvodu?
- Pro jaké řešení jste se rozhodli a proč?
- Pokud jste měli jiné nápady, jak jste se dohodli na tom, které řešení je nejlepší?
- Zeptejte se studentů, jak by měření a výpočet vzdáleností mohly být užitečné v jejich každodenním životě.
- Museli jste někdy zmapovat cestu nebo najít cestu z jednoho místa na druhé? Jak jste měřili a počítali vzdálenosti?
- Jaké další nástroje byste mohli použít k měření vzdáleností?
& Skupinová diskuse o přestávce v polovině hry
Jakmile bude mít každá skupina čas vypočítat počet zatáček potřebných k tomu, aby řídila svůj kódový základ délky trasy přehlídky, sejděte se na krátkou konverzaci.
Dejte studentům příležitost podělit se o svá řešení a metody. Toto je čas na ověření pochopení a nápravu případných mylných představ studentů. Veďte je k tomu, aby se podělili o své myšlenky, pomocí těchto podnětů:
- Jaká byla délka, kterou vaše skupina změřila na jedno otočení kola?
- Jak vaše skupina využila tyto informace k výpočtu počtu otáček kola v parametru v bloku [Spin for], aby robot urazil přesnou vzdálenost?
- Proč si myslíte, že je to nejlepší řešení?
Část 2 - Krok za krokem
- Poučte studenty, že budou používat svá řešení z 1. části hry, aby kódovali svou kódovou základnu a mohli se zúčastnit přehlídky! Nejprve vytvoří svůj projekt VEXcode GO a zadají počet otáček kola. Poté otestují svůj projekt s Code Base. Pokud byly jejich výpočty správné, jejich robot bude řídit délku trasy přehlídky. Následující video ukazuje, jak by se měla Code Base pohybovat při jízdě v průvodu. V animaci kódová základna jede rovně přes pět propojených dlaždic a když dosáhne konce, zobrazí se čára označující celkovou ujetou vzdálenost.
Video soubor
- Modelový model pro studenty, jak začít se svými projekty ve VEXcode GO.
- Začněte tím, že studentům ukážete, jak připojit Brain na jejich Code Base k jejich zařízení ve VEXcode GO. Protože se kroky připojení u jednotlivých zařízení liší, přečtěte si konkrétní kroky pro připojení zařízení VEX GO Brain k počítači nebo tabletu v části Připojení k VEXcode GO v článcích.
- Po připojení otevřou ukázkový projekt Parade Float a začnou kódovat svůj projekt. Chcete-li to provést, vyberte na panelu nástrojů „Soubor“ a poté „Otevřít příklady“. Poté vyberte příklad projektu „Parade Float“.

-
Podívejte se na video níže a zjistěte, jak otevřít ukázkový projekt Parade Float ve VEXcode GO. V panelu nástrojů GO se otevře nabídka Soubor a v rozbalovací nabídce se klikne na čtvrtou položku s názvem „Otevřít příklady“. Otevře se nabídka Příklady projektů GO a vybere se a načte projekt Parade Float.
Video soubor - Pokud studenti potřebují další podporu, nechte je shlédnout tutoriál Používání příkladů ve VEXcode GO, kde najdete instrukce, jak používat vzorové projekty a šablony.
-
Použití výukového programu pro příklady - Pak je nechte zadat své řešení z 1. části hry do parametrů bloků [Spin for].
 Startér projektu
Startér projektu Parade Float Lab 4 - Požádejte studenty, aby svůj projekt pojmenovali jako Parade Float Lab 4 a uložili jej do svého zařízení. Postup uložení projektu VEXcode GO specifický pro dané zařízení naleznete v části Otevřít a uložit v knihovně VEXcode GO STEM.
Model pro studenty, jak otestovat svůj projekt na Parade Route.
Poznámka: Ujistěte se, že máte blok „a nečekejte“ otevřený, jinak váš projekt nemusí běžet podle očekávání, protože druhý blok motoru bude čekat, až bude první blok dokončen.
-
Nejprve jim ukažte, jak umístit robota do výchozího bodu, jak je znázorněno na obrázku níže. Použijte modrý distanční sloupek na kole, abyste pomohli zarovnat střed kola s přední hranou startovní čáry.
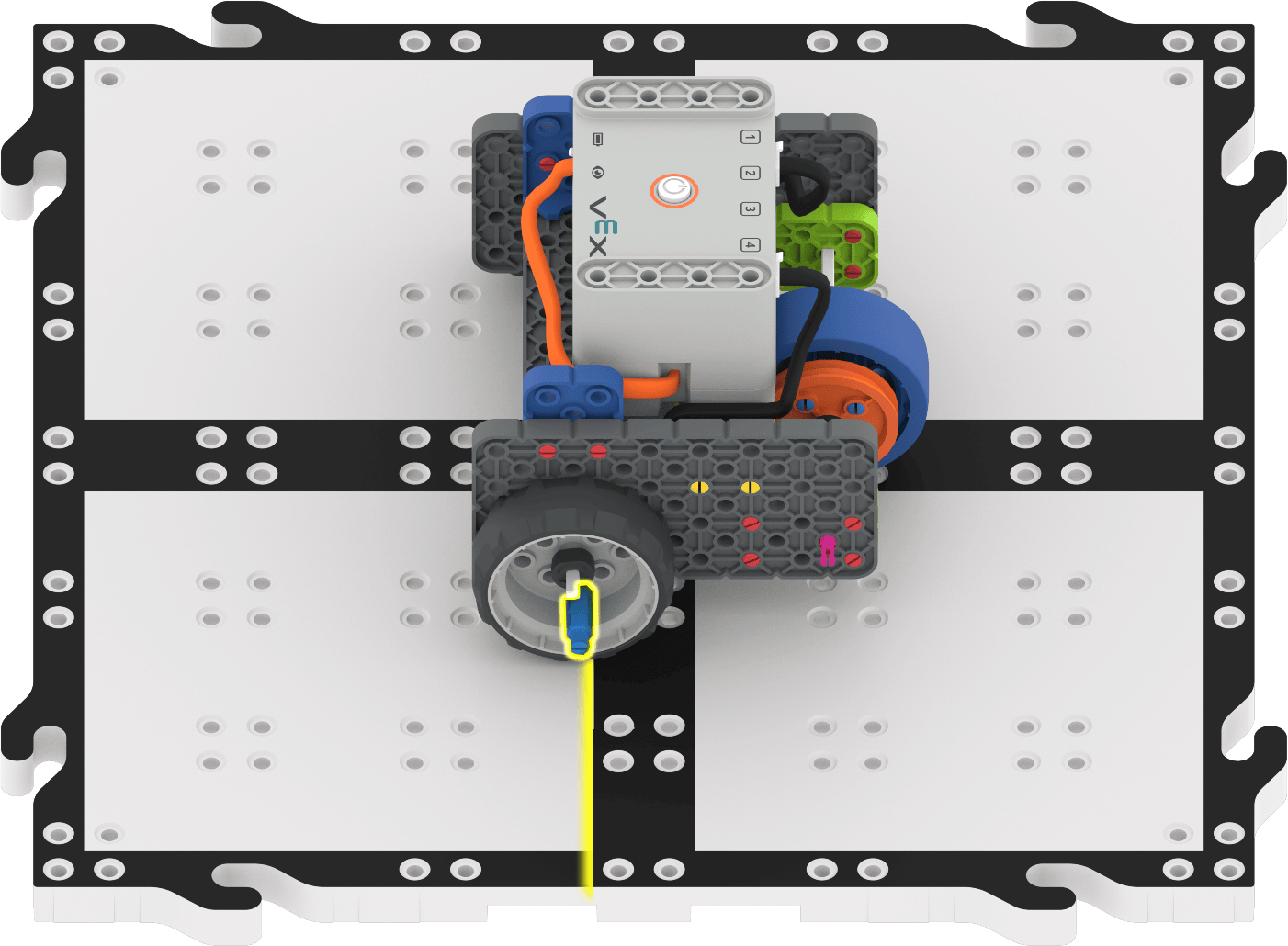
Vyrovnání kódové základny se začátkem trasy přehlídky pomocí modrého odstupu - Jakmile je Code Base na svém místě, vyberte „Start“ ve VEXcode GO a otestujte projekt.
Zvolte Start pro otestování projektu - Studenti budou muset pro zastavení projektu vybrat tlačítko „Stop“ na panelu nástrojů VEXcode GO.
- Umožněte studentům otestovat své projekty a provést aktualizace a v případě potřeby otestovat znovu.
- Jakmile budou mít studenti možnost otestovat své projekty na trase průvodu, nechte je přidat přílohy k průvodním vozům do kódové základny a zúčastnit se průvodu celé třídy, kde se všechny skupiny střídají v realizaci svých projektů.
- Studenti, kteří skončí dříve a potřebují další výzvy, mohou naprogramovat svého robota tak, aby urazil delší vzdálenost. Předložte studentům následující scénář:
- Trasa přehlídky byla prodloužena na 152 cm (60 palců). Funguje stále tvůj kód? Co musíte změnit, aby Code Base jezdila po celé délce nové trasy přehlídky?
- Usnadněte konverzaci se studenty při vytváření a testování jejich projektů pomocí otázek, jako jsou:
- Jel váš robot správnou vzdálenost? Proč nebo proč ne?
- Jaké informace zadáváte do bloků [Spin for]? Odkud toto číslo pochází?
Usnadněte strategie řešení problémů, když studenti testují své projekty. Studenti v podstatě používají kódovou bázi ke kontrole své práce a při tom se musí ujistit, že vypočítali správný počet potřebných otáček a správně zadali tyto informace do bloku [Spin for]. Ptejte se a poskytujte zpětnou vazbu při práci studentů, ale vyhněte se tomu, abyste studentům dávali odpovědi, když usnadňujete činnost v této laboratoři. V tomto článku najdete strategie, jak vést studenty při práci a poskytovat efektivní zpětnou vazbu, aniž byste jim poskytli odpovědi.
Pokud kódová báze nevede dostatečně daleko nebo příliš daleko, nechte studenty zkontrolovat vstupy bloků [Spin for] a ujistěte se, že zadali svá řešení správně.
- Je hodnota v bloku [Spin for] stejná jako vaše řešení? Je desetinné číslo na správném místě?
- Jsou hodnoty v obou blocích [Spin for] stejné?
Pokud kódová báze neujede správnou vzdálenost a všechny vstupy jsou přesné, znamená to, že jejich řešení (počet potřebných otáček kola) je nesprávné. Veďte je ke kontrole výpočtů z 1. části hry.
Roztok se může lišit na základě použitých měrných jednotek nebo kvůli mírným odchylkám při zaokrouhlování měření. Následuje jeden příklad řešení.
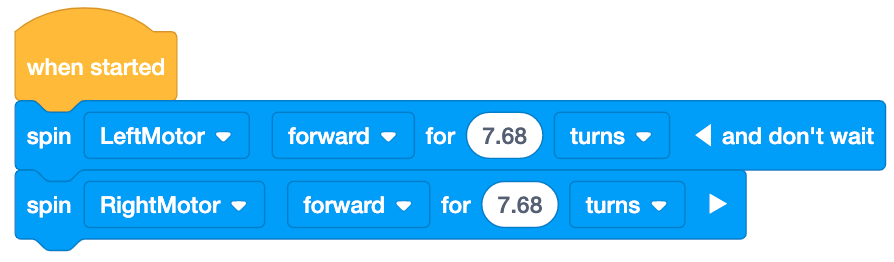
Možné řešení - Připomeňte studentům, že může trvat několik pokusů, aby jejich projekt fungoval. Připomeňte jim, že pokus a omyl je součástí testovacího procesu a důležitou součástí kódování.
- Zašel váš robot příliš daleko? Nebo ne dost daleko? Proč si myslíte, že se to stalo?
- Co můžete ve svém projektu změnit, aby Code Base přesněji řídil vzdálenost trasy přehlídky?
- Zeptejte se studentů, jak může být přesný pohyb kódovacích robotů užitečný v jiných oblastech.
- Proč je důležité, aby skutečné přehlídkové plováky správně urazily vzdálenost trasy? Co by se mohlo stát, kdyby to neudělali?
- Co kdybyste měli robota, který by dokázal ujet přesné vzdálenosti a sledovat konkrétní trasy? Jak byste mohli tohoto robota využít k pomoci doma? Nebo ve škole?