
يلعب
الجزء الأول - خطوة بخطوة
- تعليماتأرشد الطلاب إلى أنهم سوف يقومون بقياس المسافة التي سوف تقطعها قاعدة التعليمات
البرمجية بدورة عجلة واحدة. ثم سيستخدمون هذه المعلومات لإنشاء خطة لترميز الروبوتات الخاصة بهم للتحرك بدقة
على طول مسار العرض بالكامل.
يجب أن تدفع تجربة الطلاب في قياس مسافة دورة عجلة واحدة جنبًا إلى جنب مع ملاحظات المعلم والأسئلة الطلاب إلى إدراك أنه يمكنهم استخدام هذه المعلومات لتحديد عدد دورات العجلة في مسار العرض بالكامل، ثم إدخال هذه المعلومات في كتل [Spin for] عندما يقومون بإنشاء الكود الخاص بهم لاحقًا في المختبر. راجع قسم التسهيل للحصول على الاقتراحات. - نموذجنموذج للطلاب حول كيفية إعداد قياس مسافة دورة عجلة واحدة. شاهد الفيديو أدناه لمعرفة
كيفية محاذاة العجلة على المسطرة وتدويرها لقياس دوران العجلة.
ملف الفيديو
- يجب على الطلاب استخدام الخطوات التالية لقياس مسافة دورة العجلة الواحدة (كما هو موضح في الفيديو
أعلاه).
-
أولاً، قم بإزالة عجلة رمادية واحدة من قاعدة التعليمات البرمجية وقم بتركيب فاصل أزرق. سوف تستخدم هذا كدليل مرئي لرؤية دورة واحدة من العجلة.

أدخل الفاصل الأزرق في العجلة الرمادية - بعد ذلك، قم بمحاذاة المسافة مع نقطة البداية المحددة على قطعة من الورق أو على جهاز القياس.
- بعد ذلك، استخدم يديك لتدوير العجلة حتى يكمل Blue Standoff دورة واحدة ويعود إلى نقطة البداية.
- وأخيرا، قم بقياس المسافة واكتبها. هذا هو مدى دوران الروبوت بدورة واحدة للعجلات.
- يجب على الطلاب تقريب القياس إلى أقرب جزء من المائة.
- قد تكون هناك قياسات مختلفة قليلاً. فيما يلي مثال واحد: (1 دورة = 6.25 بوصة (16 سم))
- يمكن للطلاب تقريب العدد إلى 6 بوصات إذا لم يكونوا على دراية بالكسور أو الأعداد العشرية. لاحظ أن هذا سيؤثر على دقة المسافة التي يقطعها الكود الأساسي
-
- يجب على الطلاب استخدام الخطوات التالية لقياس مسافة دورة العجلة الواحدة (كما هو موضح في الفيديو
أعلاه).
- تسهيلقم بتسهيل محادثة مع الطلاب لمنحهم الفرصة لمشاركة أفكارهم والتوصل إلى فهم لكيفية
استخدام مسافة دورة عجلة واحدة لإعداد خطة لترميز الروبوت للسفر على المسافة الدقيقة لمسار العرض.
بينما يعمل الطلاب، اطرح الأسئلة وقدم الملاحظات لمساعدتهم على إكمال القياس وكذلك لتوجيههم إلى إدراك كيفية استخدام هذا القياس لترميز الروبوت للتحرك لمسافة .
- كم بوصة أو سنتيمتر كانت دورة واحدة من العجلة الخاصة بك؟
- إذا قطعت عجلتك مسافة معينة (6.25 بوصة أو 16 سم) في دورة واحدة للعجلة، فكم ستقطع من مسافة عند دوران العجلتين مرتين؟ ثلاث مرات؟
- الآن بعد أن عرفت مسافة دورة العجلة الواحدة، كيف يمكننا استخدام هذه المعلومات لترميز الروبوت للسفر على طول مسار العرض بالكامل (48 بوصة أو 122 سم)؟
- تذكيرذكّر الطلاب بأنه نظرًا لكون هذا نشاطًا مفتوحًا، فقد لا يكون لدى أعضاء المجموعة نفس
الأفكار، وأنه من المهم تبني عملية التوصل إلى اتفاق على نهج لحل المشكلات.
- ما هي الأفكار التي كانت لدى مجموعتك حول كيفية استخدام ما تعلمته من قياس مسافة دورة عجلة واحدة لمساعدتك في برمجة الروبوت للسفر على طول مسار العرض بأكمله؟
- ما هو الحل الذي قررته ولماذا؟
- إذا كانت لديكم أفكار مختلفة، كيف توصلتم إلى اتفاق حول الحل الأفضل؟
- اسألاسأل الطلاب عن كيفية إمكانية الاستفادة من قياس المسافات وحسابها في حياتهم اليومية.
- هل سبق لك أن اضطررت إلى رسم خريطة لمسارك أو العثور على طريقك من مكان إلى آخر؟ كيف قمت بقياس وحساب المسافات؟
- ما هي بعض الأدوات الأخرى التي يمكنك استخدامها لقياس المسافات؟
مناقشة جماعية & استراحة منتصف اللعب
بمجرد أن يكون لدى كل مجموعة الوقت الكافي لحساب عدد الدورات اللازمة لقيادة قاعدة التعليمات البرمجية الخاصة بهم على طول مسار العرض، يجتمعون معًا لإجراء محادثة قصيرة .
امنح الطلاب الفرصة لمشاركة حلولهم وأساليبهم. هذا هو الوقت المناسب للتحقق من الفهم وتصحيح أي مفاهيم خاطئة قد تكون لدى الطلاب. قم بتوجيههم لمشاركة تفكيرهم من خلال هذه المطالبات:
- ما هو قياس مجموعتك لمسافة لدوران عجلة واحدة؟
- كيف استخدمت مجموعتك هذه المعلومات لمعرفة عدد دورات العجلة المطلوبة في المعلمة في كتلة [Spin for] لبرمجة الروبوت الخاص بك لقطع المسافة الدقيقة؟
- لماذا تعتقد أن هذا هو الحل الأفضل؟
الجزء الثاني - خطوة بخطوة
- تعليماتقم بتوجيه الطلاب إلى أنهم سوف يستخدمون حلولهم من الجزء الأول من اللعب لكتابة
قاعدة التعليمات البرمجية الخاصة بهم للمشاركة في العرض! سيقومون أولاً بإنشاء مشروع VEXcode GO الخاص بهم،
وإدخال عدد دورات العجلة. ومن ثم، سيقومون باختبار مشروعهم باستخدام قاعدة التعليمات البرمجية. إذا كانت
حساباتهم صحيحة، فسوف يقود روبوتهم طول مسار العرض. يُظهر الفيديو التالي كيفية تحرك قاعدة التعليمات البرمجية
أثناء قيادتها في العرض.
ملف الفيديو
- نموذجنموذج للطلاب حول كيفية البدء في مشاريعهم في VEXcode GO.
- ابدأ بإظهار للطلاب كيفية ربط الدماغ في قاعدة التعليمات البرمجية الخاصة بهم بجهازهم في VEXcode GO. نظرًا لأن خطوات الاتصال تختلف بين الأجهزة، راجع القسم الخاص بذلك الاتصال ب مقالة VEXcode GOs للحصول على خطوات محددة لتوصيل VEX GO Brain بجهاز الكمبيوتر الخاص بك أو قرص.
- بمجرد الاتصال، سيفتحون مشروع Parade Float Example ويبدأون في برمجة مشروعهم. للقيام بذلك، حدد "ملف"
من شريط الأدوات، ثم "فتح الأمثلة". بعد ذلك، حدد مشروع المثال "Parade Float".
-
شاهد الفيديو أدناه لمعرفة كيفية فتح مشروع موكب تعويم مثال في VEXcode GO.
ملف الفيديو - إذا احتاج الطلاب إلى دعم إضافي، منهم مشاهدة البرنامج التعليمي "استخدام الأمثلة" في VEXcode
GO للحصول على إرشادات حول كيفية استخدام المشروعات والقوالب النموذجية.
-
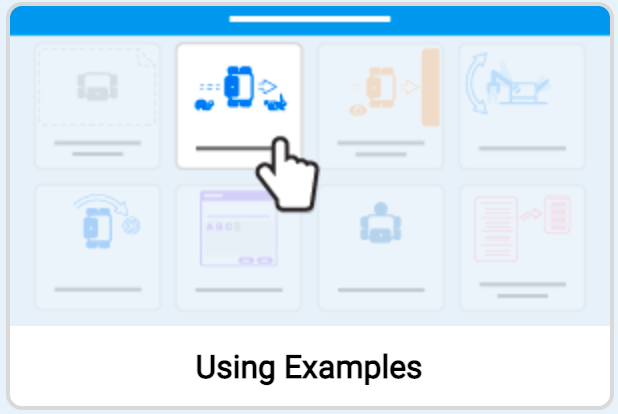
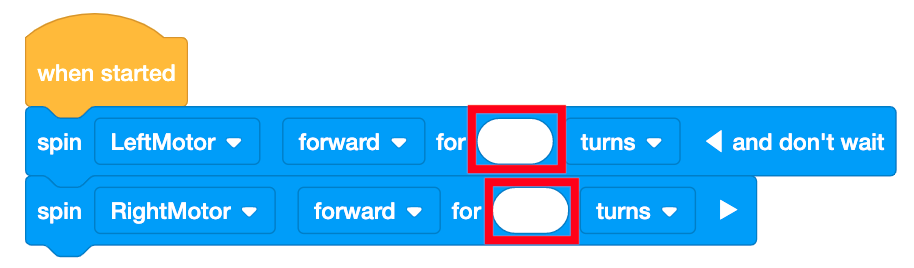
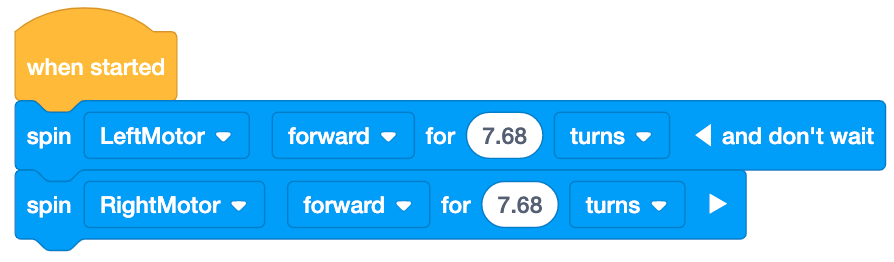
استخدام الأمثلة التعليمية - ثم منهم إدخال حلولهم من الجزء الأول من اللعبة في معلمات الكتل [Spin for].
مختبر موكب تعويم 4 - المشروع المبدئي - اطلب من الطلاب تسمية مشروعهم باسم موكب تعويم Lab 4 وحفظه على أجهزتهم. انظر فتح و حفظ قسم مكتبة VEXcode GO STEM للحصول على خطوات خاصة بالجهاز لحفظ VEXcode GO مشروع.
نموذج للطلاب حول كيفية اختبار مشروعهم على مسار العرض.
ملحوظة: تأكد من إبقاء الكتلة "ولا تنتظر" مفتوحة، وإلا فإن مشروعك قد لا تعمل كما هو متوقع لأن كتلة المحرك الثانية سوف تنتظر حتى الانتهاء من الكتلة الأولى.
-
أولاً، أظهر لهم كيفية وضع الروبوت الخاص بهم في نقطة البداية كما هو موضح في الصورة أدناه. استخدم المباعدة الزرقاء الموجودة على العجلة للمساعدة في محاذاة مركز العجلة مع الحافة الأمامية لخط البداية.
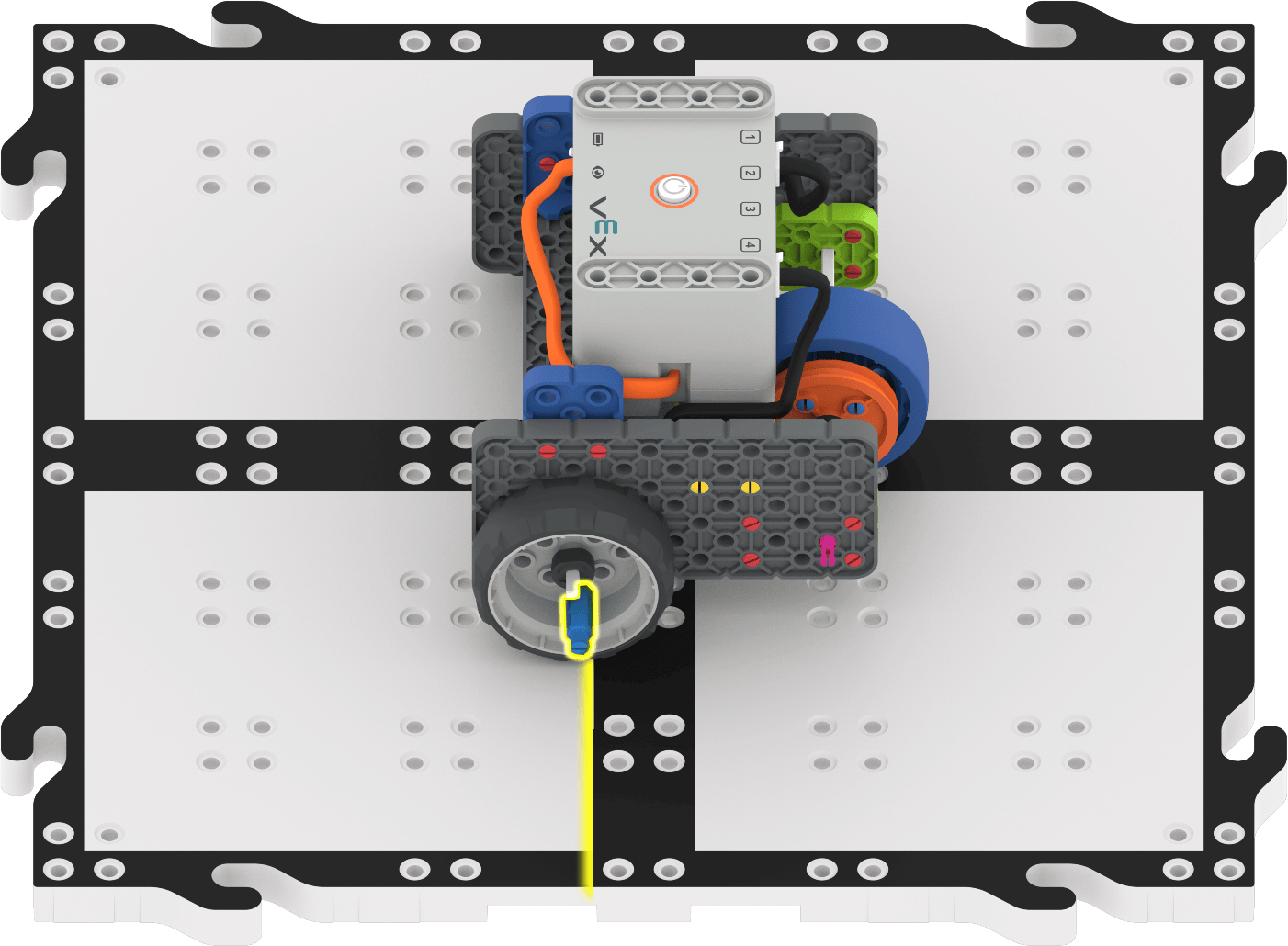
محاذاة قاعدة التعليمات البرمجية مع بداية مسار العرض باستخدام Blue Standoff - بمجرد وضع قاعدة التعليمات البرمجية في مكانها، حدد "ابدأ" في VEXcode GO لاختبار المشروع.
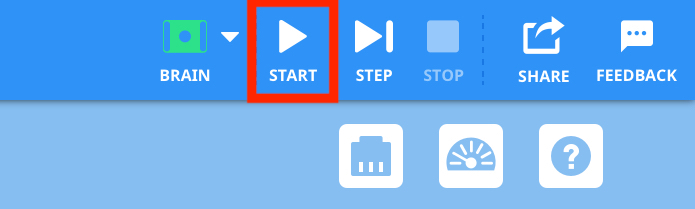
حدد البدء لاختبار المشروع - سيتعين على الطلاب تحديد زر "إيقاف" في شريط أدوات VEXcode GO لإيقاف المشروع.
- خصص وقتًا للطلاب لاختبار مشاريعهم وإجراء التحديثات عليها، واختبارها مرة أخرى إذا لزم الأمر.
- بمجرد حصول الطلاب على فرصة لاختبار مشاريعهم على مسار العرض، اطلب منهم إضافة من مرفقات عوامات العرض الخاصة بهم إلى قاعدة التعليمات البرمجية والمشاركة في عرض للفصل بأكمله حيث تتناوب جميع المجموعات على تشغيل مشاريعها.
- بالنسبة للطلاب الذين ينتهون مبكرًا ويحتاجون إلى تحديات إضافية، اطلب منهم برمجة الروبوت الخاص بهم
لقطع مسافة أطول. أعط الطلاب السيناريو التالي:
- تم تمديد مسار العرض إلى 60 بوصة (152 سم). هل لا يزال الكود الخاص بك يعمل؟ ما الذي يجب عليك تغييره حتى يتمكن Code Base من قيادة طول مسار العرض الجديد بالكامل؟
- تسهيلتسهيل المحادثة مع الطلاب أثناء قيامهم ببناء مشاريعهم واختبارها من خلال أسئلة مثل:
- هل قطع الروبوت الخاص بك المسافة الصحيحة؟ لماذا أو لماذا لا؟
- ما هي المعلومات التي تقوم بإدخالها في الكتل [Spin for]؟ من أين جاء هذا الرقم؟
تسهيل استراتيجيات استكشاف الأخطاء وإصلاحها أثناء اختبار الطلاب لمشاريعهم. يستخدم الطلاب بشكل أساسي قاعدة التعليمات البرمجية للتحقق من عملهم، وعند القيام بذلك، سيتعين عليهم التأكد من أنهم حسبوا العدد الصحيح من الدورات المطلوبة، وإدخال هذه المعلومات في كتلة [Spin for] بشكل صحيح. اطرح الأسئلة وقدم الملاحظات أثناء عمل الطلاب، ولكن تجنب إعطاء الطلاب الإجابات أثناء تسهيل النشاط في هذا المختبر. انظر هذه المقالة للحصول على استراتيجيات حول كيفية توجيه الطلاب أثناء عملهم وعطاءهم ردود فعل فعالة دون إعطاء إجابات.
إذا لم تصل قاعدة التعليمات البرمجية إلى بدرجة كافية أو وصلت إلى حد بعيد للغاية، اطلب من الطلاب التحقق من مدخلات كتل [Spin for]، والتأكد من إدخال حلولهم بشكل صحيح.
- هل القيمة الموجودة في الكتلة [Spin for] هي نفس الحل الخاص بك؟ هل العدد العشري في المكان الصحيح؟
- هل القيم هي نفسها في كلا الكتلتين [Spin for]؟
إذا لم تقود قاعدة التعليمات البرمجية المسافة الصحيحة وكانت جميع المدخلات دقيقة، فهذا يعني أن حلها (عدد دورات العجلة المطلوبة) غير صحيح. أرشدهم للتحقق من حساباتهم من الجزء الأول من اللعبة
قد تكون هناك اختلافات في الحل بناءً على وحدات القياس المستخدمة، أو بسبب الاختلافات الطفيفة عند تقريب القياسات. وفيما يلي مثال على أحد الحلول.
الحل الممكن - تذكيرذكّر الطلاب بأن الأمر قد يستغرق محاولات متعددة لإنجاح مشروعهم. ذكّرهم بأن التجربة
والخطأ جزء من عملية الاختبار، وجزء مهم من الترميز.
- هل ذهب الروبوت الخاص بك بعيدا جدا؟ أم أنها ليست بعيدة بما فيه الكفاية؟ لماذا تعتقد أن ذلك حدث؟
- ما الذي يمكنك تغييره في مشروعك لجعل قاعدة التعليمات البرمجية تحدد مسافة مسار العرض بشكل أكثر دقة؟
- اسأل الطلابكيف يمكن أن يكون برمجة الروبوتات للتحرك بدقة مفيدًا في مجالات أخرى.
- لماذا من المهم بالنسبة لعربات العرض الحقيقية أن تقطع مسافة المسار بشكل صحيح؟ ماذا يمكن أن يحدث لو لم يفعلوا ذلك؟
- ماذا لو كان لديك روبوت يمكنه القيادة لمسافات محددة واتباع مسارات محددة؟ كيف يمكنك استخدام هذا الروبوت لمساعدتك في المنزل؟ أو في المدرسة؟