
Spielen
Teil 1 - Schritt für Schritt
- UnterrichtenWeisen Sie die Schüler an, die Entfernung zu messen, die die Code Base mit
einer Radumdrehung zurücklegt. Anschließend verwenden sie diese Informationen, um einen Plan zum
Programmieren ihrer Roboter zu erstellen, damit diese sich präzise entlang der gesamten Paradestrecke
bewegen.
Die Erfahrungen der Schüler beim Messen der Distanz einer Radumdrehung in Kombination mit Feedback und Fragen des Lehrers sollten den Schülern bewusst machen, dass sie diese Informationen verwenden können, um die Anzahl der Radumdrehungen auf der gesamten Paradestrecke zu bestimmen, und diese Informationen dann in die Blöcke [Drehen für] eingeben können, wenn sie später im Labor ihren Code erstellen. Vorschläge finden Sie im Abschnitt „Moderieren“. - ModellModell für Schüler, wie man die Distanz einer Radumdrehung misst. Sehen Sie sich
das Video unten an, um zu erfahren, wie Sie das Rad auf dem Lineal ausrichten und es rollen, um eine
Radumdrehung zu messen.
Videodatei
- Die Schüler sollten die folgenden Schritte verwenden, um die Distanz einer Radumdrehung zu messen
(wie im Video oben gezeigt).
-
Nehmen Sie zuerst ein graues Rad von der Codebasis ab und befestigen Sie einen blauen Abstandshalter. Sie verwenden dies als visuelle Anleitung, um eine Umdrehung des Rades zu sehen.

Blauen Abstandshalter in graues Rad einsetzen - Richten Sie dann den Abstandshalter an dem auf einem Blatt Papier oder auf dem Messgerät markierten Startpunkt aus.
- Rollen Sie anschließend das Rad mit Ihren Händen, bis der blaue Abstandshalter eine Umdrehung abgeschlossen hat und zum Ausgangspunkt zurückkehrt.
- Messen Sie abschließend die Entfernung und notieren Sie sie. So weit kann sich der Roboter mit
einer Raddrehung drehen.
- Die Schüler sollten die Maßeinheit auf die nächste Hundertstelstelle runden.
- Es kann zu geringfügigen Abweichungen bei den Maßen kommen. Das Folgende ist ein Beispiel: (1 Umdrehung = 6,25 Zoll (16 cm))
- Schüler können auf 6 Zoll abrunden, wenn sie mit Brüchen oder Dezimalzahlen nicht vertraut sind. Beachten Sie, dass dies die Genauigkeit beeinflusst, wie weit die Codebasis fährt
-
- Die Schüler sollten die folgenden Schritte verwenden, um die Distanz einer Radumdrehung zu messen
(wie im Video oben gezeigt).
- ModerierenModerieren Sie ein Gespräch mit den Schülern, um ihnen die Möglichkeit zu
geben, ihre Gedanken auszutauschen und zu einer Überlegung zu gelangen, wie sie die Distanz einer
Radumdrehung nutzen würden, um einen Plan für die Programmierung des Roboters zu erstellen, damit dieser
die exakte Distanz der Paradestrecke zurücklegen kann.
Stellen Sie den Schülern während der Arbeit Fragen und geben Sie Feedback, um ihnen bei der Durchführung der Messung zu helfen und ihnen zu zeigen, wie sie diese Messung nutzen können, um den Roboter so zu programmieren, dass er sich über eine genaue Distanz bewegt.
- Wie viele Zoll oder Zentimeter waren eine Umdrehung Ihres Rades?
- Wenn Ihr Rad mit einer Radumdrehung eine bestimmte Distanz (6,25 Zoll oder 16 cm) zurücklegt , wie weit würde es mit zwei Radumdrehungen zurücklegen? Drei?
- Nachdem Sie nun die Distanz einer Radumdrehung kennen, wie können wir diese Information nutzen, um den Roboter so zu programmieren, dass er die gesamte Paradestrecke (48 Zoll bzw. 122 cm) zurücklegt?
- ErinnernErinnern Sie die Schüler daran, dass es sich um eine Aktivität mit offenem Ende
handelt und die Gruppenmitglieder daher möglicherweise nicht die gleichen Ideen haben. Daher ist es
wichtig, sich auf den Prozess der Einigung auf einen Ansatz zur Problemlösung einzulassen.
- Welche Ideen hatte Ihre Gruppe dazu, wie Sie was Sie aus der Messung der Distanz einer Radumdrehung gelernt haben, nutzen können, um den Roboter so zu programmieren, dass er die gesamte Paradestrecke zurücklegen kann?
- Für welche Lösung haben Sie sich entschieden und warum?
- Wenn Sie unterschiedliche Vorstellungen hatten, wie sind Sie zu einer Einigung gekommen, welche die beste Lösung ist?
- FrageFragen Sie die Schüler, wie das Messen und Berechnen von Entfernungen in ihrem
täglichen Leben nützlich sein könnte.
- Mussten Sie schon einmal einen Weg planen oder den Weg von einem Ort zum anderen finden? Wie haben Sie die Entfernungen gemessen und berechnet?
- Welche anderen Werkzeuge können Sie zum Messen von Entfernungen verwenden?
Spielpause & Gruppendiskussion
Sobald jede Gruppe Zeit hatte, die Anzahl der nötigen Runden zu berechnen, um mit ihrer Code Base die gesamte Länge der Paradestreckeabzufahren, kommen sie zu einem kurzen Gespräch zusammen.
Geben Sie den Schülern die Möglichkeit, ihre Lösungen und Methoden mitzuteilen. Dies ist der Zeitpunkt, um das Verständnis der Schüler zu überprüfen und etwaige Missverständnisse zu korrigieren. Leiten Sie sie mit diesen Aufforderungen dazu an, ihre Gedanken mitzuteilen:
- Wie hoch war die Messung der einer Radumdrehung durch Ihre Gruppe?
- Wie hat Ihre Gruppe diese Informationen verwendet, um herauszufinden, wie viele Radumdrehungen im Parameter im Block [Spin for] erforderlich wären, um Ihren Roboter so zu programmieren, dass er die genaue Distanz zurücklegt?
- Warum glauben Sie, dass dies die beste Lösung ist?
Teil 2 - Schritt für Schritt
- UnterweisenWeisen Sie die Schüler an, dass sie ihre Lösungen aus Spielteil 1 verwenden
werden, um ihre Codebasis zu codieren und an der Parade teilzunehmen! Sie erstellen zuerst ihr VEXcode
GO-Projekt und geben die Anzahl der Radumdrehungen ein. Anschließend testen sie ihr Projekt mit der
Codebasis. Wenn ihre Berechnungen richtig waren, wird ihr Roboter die gesamte Paradestrecke abfahren. Das
folgende Video zeigt, wie sich die Code Base während der Fahrt in der Parade bewegen soll.
Videodatei
- ModellModell für Studenten, wie sie mit ihren Projekten in VEXcode GO beginnen.
- Zeigen Sie den Schülern zunächst, wie sie das Brain auf ihrer Code Base mit ihrem Gerät in VEXcode GO verbinden. Da die Verbindungsschritte je nach Gerät unterschiedlich sind, lesen Sie den Abschnitt über Verbindung zu VEXcode herstellen GO-Artikel für spezifische Schritte zum Anschließen des VEX GO Brain an Ihren Computer oder Tablette.
- Sobald die Verbindung hergestellt ist, öffnen sie das Parade Float-Beispielprojekt und beginnen mit
der Codierung ihres Projekts. Wählen Sie dazu in der Symbolleiste „Datei“ und dann „Beispiele öffnen“.
Wählen Sie dann das Beispielprojekt „Paradewagen“ aus.
-
Sehen Sie sich das Video unten an, um zu erfahren, wie Sie das Parade Float-Beispielprojekt in VEXcode GO öffnen.
Videodatei - Wenn die Schüler zusätzliche Unterstützung benötigen, lassen Sie sich das Tutorial
„Verwenden von Beispielen“ in VEXcode GO ansehen, um Anweisungen zur Verwendung von
Beispielprojekten und Vorlagen zu erhalten.
-
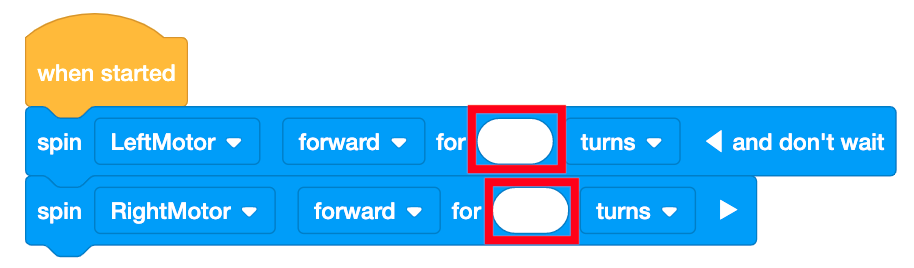
Beispiele verwenden Tutorial - Sie sie dann ihre Lösung aus Teil 1 des Spiels in die Parameter der Blöcke [Drehen für] eingeben.
Paradewagen Lab 4 Projektstarter - Lassen Sie die Schüler ihr Projekt Parade Float Lab 4 “ nennen und auf ihrem Gerät speichern. Weitere Informationen finden Sie im Abschnitt „Öffnen und Speichern“ der VEXcode GO STEM-Bibliothek gerätespezifische Schritte zum Speichern eines VEXcode GO-Projekts.
Modell für Schüler, wie sie ihr Projekt auf der Paradestrecke testen können.
Hinweis: Stellen Sie sicher, dass Sie die Option „und nicht warten“ des Blocks geöffnet lassen. Andernfalls wird Ihr Projekt möglicherweise nicht wie erwartet ausgeführt, weil der zweite Motorblock wartet, bis der erste Block fertig ist.
-
Zeigen Sie ihnen zunächst, wie sie ihren Roboter am Startpunkt platzieren, wie im Bild unten gezeigt. Verwenden Sie den blauen Abstandshalter am Rad, um die Mitte des Rads mit der Vorderkante der Startlinie auszurichten.
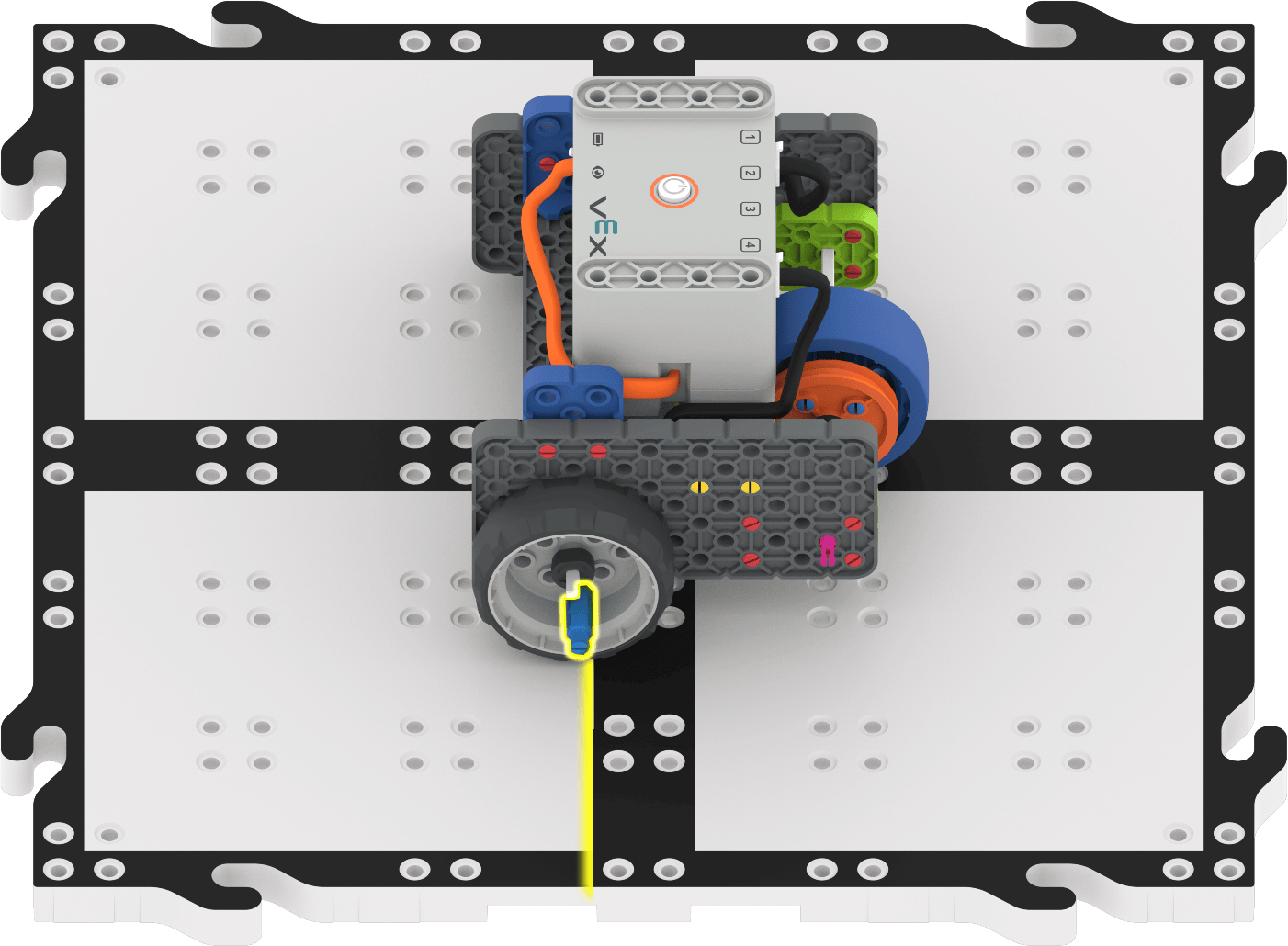
Ausrichten der Code-Basis am Start der Paradestrecke mithilfe eines Blue Standoff - Sobald die Codebasis vorhanden ist, wählen Sie in VEXcode GO „Start“, um das Projekt zu testen.
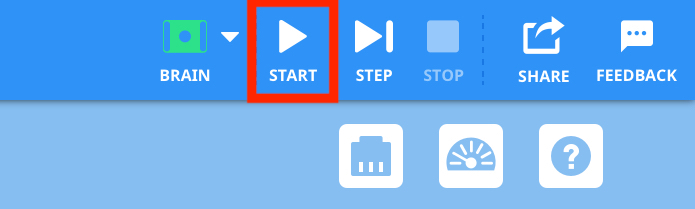
Wählen Sie „Starten“, um Projekt zu testen- Um das Projekt zu stoppen, müssen die Studierenden die Schaltfläche „Stopp“ in der VEXcode GO-Symbolleiste auswählen.
- Geben Sie den Schülern Zeit, ihre Projekte zu testen, Aktualisierungen vorzunehmen und sie bei Bedarf erneut zu testen.
- Nachdem die Schüler die Möglichkeit hatten, ihre Projekte auf der Paradestrecke zu testen, lassen Sie sie ihre Paradewagenanhänge zur Codebasis und an Parade mit der ganzen Klasse teilnehmen, bei der alle Gruppen abwechselnd ihre Projekte vorführen.
- Lassen Sie Schüler, die früher fertig sind und zusätzliche Herausforderungen brauchen, ihren Roboter
so programmieren, dass er eine längere Strecke fährt. Geben Sie den Schülern das folgende
Szenario:
- Die Paradestrecke wurde auf 60 Zoll (152 cm) verlängert. Funktioniert Ihr Code noch? Was muss geändert werden, damit die Code Base die gesamte Länge der neuen Paradestrecke befährt?
- ModerierenModerieren Sie ein Gespräch mit den Schülern, während sie ihre Projekte
erstellen und testen, mit Fragen wie:
- Ist Ihr Roboter die richtige Strecke gefahren? Warum oder warum nicht?
- Welche Informationen geben Sie in die [Spin for]-Blöcke ein? Woher kommt diese Zahl?
Ermöglichen Sie Strategien zur Fehlerbehebung, während die Schüler ihre Projekte testen. Die Schüler verwenden die Codebasis im Wesentlichen zur Überprüfung ihrer Arbeit. Dabei müssen sie sicherstellen, dass die richtige Anzahl der erforderlichen Umdrehungen berechnet haben und diese Informationen dann korrekt in den Block [Drehen für] eingeben. Stellen Sie Fragen und geben Sie Feedback während der Arbeit der Schüler, aber vermeiden Sie es, den Schülern die Antworten zu geben, während Sie die Aktivität in diesem Labor leiten. Siehe diesen Artikel nach Strategien, wie man Schüler bei der Arbeit und beim Geben anleitet effektives Feedback, ohne Antworten zu geben.
Wenn die Codebasis nicht weit genug geht oder zu weit geht, lassen Sie die Schüler die Eingaben der [Spin for]-Blöcke überprüfen und stellen Sie sicher, dass sie ihre Lösungen richtig eingeben.
- Ist der Wert im Block [Spin for] derselbe wie Ihre Lösung? Steht das Komma an der richtigen Stelle?
- Sind die Werte in beiden [Spin for]-Blöcken gleich?
Wenn die Codebasis nicht die richtige Distanz fährt und alle Eingaben genau sind, bedeutet dies, dass ihre Lösung (die Anzahl der benötigten Radumdrehungen) falsch ist. Leiten Sie sie an, ihre Berechnungen aus Spielteil 1 zu überprüfen.
Aufgrund der verwendeten Maßeinheiten oder geringfügiger Abweichungen beim Runden von Maßangaben kann es zu Abweichungen von der Lösung kommen. Nachfolgend sehen Sie ein Lösungsbeispiel.
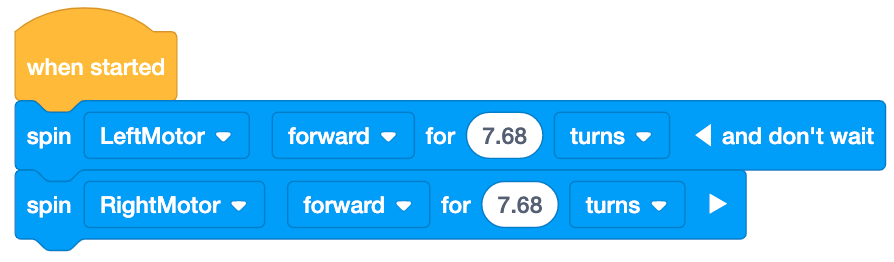
Mögliche Lösung - ErinnernErinnern Sie die Schüler daran, dass sie möglicherweise mehrere Versuche
brauchen, bis ihr Projekt funktioniert. Erinnern Sie sie daran, dass Versuch und Irrtum Teil des
Testprozesses und ein wichtiger Bestandteil der Codierung sind.
- Ist Ihr Roboter zu weit gegangen? Oder nicht weit genug? Warum ist das Ihrer Meinung nach passiert?
- Was können Sie in Ihrem Projekt ändern, damit die Codebasis die Distanz der Paraderoute genauer bestimmt?
- FrageFragen Sie die Schüler, wie die Codierung von Robotern für präzise Bewegungen in
anderen Bereichen nützlich sein kann.
- Warum ist es bei echten Festwagen wichtig, die Streckenlänge korrekt zurückzulegen? Was könnte passieren, wenn sie es nicht täten?
- Was wäre, wenn Sie einen Roboter hätten, der genaue Entfernungen zurücklegen und bestimmten Routen folgen könnte? Wie könnten Sie diesen Roboter als Hilfe im Haushalt einsetzen? Oder in der Schule?