
놀다
1부 - 단계별 설명
- 지시학생들에게 코드 베이스가 한 바퀴 돌 때 이동하는 거리를 측정할 것이라고 지시합니다. 그런 다음 학생들은 그 정보를 사용하여 퍼레이드 경로의 전체 길이를 정확하게 이동하도록 로봇을 코딩하는 계획을 세웁니다.
교사의 피드백과 질문과 함께 바퀴 한 바퀴의 거리를 측정하는 학생들의 경험을 통해 학생들은 이 정보를 사용하여 퍼레이드 경로 전체에서 바퀴가 몇 바퀴 회전했는지 확인할 수 있고, 나중에 랩에서 코드를 만들 때 [돌려보기] 블록에 해당 정보를 입력할 수 있다는 것을 깨닫게 됩니다. 제안 사항은 촉진 섹션을 참조하세요. - 모델학생들이 바퀴 한 바퀴의 거리를 측정하는 방법을 알려주는 모델입니다. 아래 애니메이션을 시청하여 눈금자에 바퀴를 맞추고 바퀴를 돌려 바퀴의 회전량을 측정하는 방법을 알아보세요. 애니메이션에서는 바퀴에 스탠드오프를 부착하여 바퀴가 얼마나 회전했는지를 나타내고, 바퀴가 한 바퀴 완전히 회전한 후에는 거리를 측정하는 선이 표시됩니다.
동영상 파일
- 학생들은 다음 단계에 따라 바퀴가 한 바퀴 도는 거리를 측정해야 합니다(위의 영상 참조).
-
먼저 코드 베이스에서 회색 룰렛 하나를 떼어내고 파란색 스탠드오프를 부착합니다. 이것을 시각적 가이드로 사용하여 바퀴가 한 바퀴 도는 것을 볼 수 있습니다.
 회색 휠에 파란색 스탠드오프
회색 휠에 파란색 스탠드오프 삽입 - 그런 다음 스탠드오프를 종이 또는 측정 장치에 표시된 시작점에 맞춥니다.
- 다음으로, 블루 스탠드오프가 한 턴을 완료하고 시작 지점으로 돌아갈 때까지 양손으로 휠을 굴립니다.
- 마지막으로 거리를 측정하여 기록하세요. 이는 로봇이 바퀴를 한 바퀴 돌 때 회전할 수 있는 거리입니다.
- 학생들은 측정값을 가장 가까운 백분의 일 자리로 반올림해야 합니다.
- 측정값이 약간 다를 수 있습니다. 다음은 한 가지 예입니다. (1회전 = 6.25인치(16cm))
- 분수나 소수에 익숙하지 않은 학생들은 6인치로 반올림할 수 있습니다. 이는 코드 베이스가 얼마나 멀리까지 구동되는지에 대한 정확성에 영향을 미칩니다.
-
- 학생들은 다음 단계에 따라 바퀴가 한 바퀴 도는 거리를 측정해야 합니다(위의 영상 참조).
- 촉진학생들과 대화를 촉진하여 생각을 공유하고 로봇이 퍼레이드 경로의 정확한 거리를 이동하도록 코딩하는 계획을 세우기 위해 바퀴가 한 바퀴 도는 거리를 어떻게 활용할 것인지 이해할 수 있는 기회를 제공합니다.
학생들이 작업하는 동안 질문하고 피드백을 제공하여 측정을 완료하는 데 도움을 주고, 이 측정값을 사용하여 로봇을 코딩하여 정확한 거리를 이동하는 방법을 깨닫도록 안내합니다.
- 바퀴 한 바퀴가 몇 인치 또는 몇 센티미터였나요?
- 바퀴가 한 바퀴 돌 때 특정 거리(6.25인치 또는 16cm)를 이동한다면, 두 바퀴 돌면 얼마나 이동할 수 있을까요? 삼?
- 이제 바퀴가 한 바퀴 도는 거리를 알았으니, 이 정보를 사용하여 로봇이 퍼레이드 경로 전체(48인치 또는 122cm)를 이동하도록 코딩하려면 어떻게 해야 할까요?
- 학생들에게 이것은 개방형 활동이기 때문에 그룹 구성원들이 동일한 아이디어를 가지고 있지 않을 수 있으며, 문제 해결 접근 방식에 대한 합의 과정을 수용하는 것이 중요하다는 것을 상기시킨다.
- 여러분의 그룹은 바퀴 한 바퀴의 거리를 측정하여 얻은 지식을 로봇이 퍼레이드 경로 전체를 이동할 수 있도록 코딩하는 데 활용할 수 있는 방법에 대해 어떤 아이디어를 가지고 있었나요?
- 어떤 해결책을 선택하셨나요? 그리고 그 이유는 무엇인가요?
- 다른 아이디어가 있다면, 어떤 것이 가장 좋은 해결책인지 어떻게 합의했습니까?
- 학생들에게 거리를 측정하고 계산하는 것이 일상 생활에서 어떻게 유용할 수 있는지 물어본다.
- 길을 계획하거나 한 곳에서 다른 곳으로가는 길을 찾아야했던 적이 있습니까? 거리를 어떻게 측정하고 계산했습니까?
- 거리를 측정하는 데 사용할 수 있는 다른 도구는 무엇입니까?
중간 플레이 휴식 & 그룹 토론
모든 그룹이 퍼레이드 경로의 길이만큼 코드 베이스를 구동하는 데 필요한 회전 수를 계산할 시간을 갖는 즉시 함께모여 간단한 대화를 나눕니다.
학생들에게 해결책과 방법을 공유할 기회를 제공하세요. 이때는 학생들이 이해했는지 확인하고, 잘못된 개념을 바로잡는 시간입니다. 다음과 같은 질문을 통해 생각을 공유하도록 안내하세요.
- 여러분의 그룹은 바퀴가 한 바퀴 도는 거리를 어떻게 측정했나요?
- 여러분의 그룹은 [회전 대상] 블록의 매개변수에서 로봇이 정확한 거리를 이동하도록 코딩하기 위해 필요한 바퀴 회전 수를 파악하기 위해 이 정보를 어떻게 사용했습니까?
- 왜 이것이 최선의 해결책이라고 생각하십니까?
파트 2 - 단계별
- 학생들에게 플레이 파트 1의 솔루션을 사용하여 코드 베이스를 코드화하여 퍼레이드에 참여하도록 지시하십시오! 먼저 VEXcode GO 프로젝트를 생성하고 휠 회전 수를 입력합니다. 그런 다음 Code Base로 프로젝트를 테스트합니다. 그들의 계산이 정확하다면, 로봇은 퍼레이드 경로의 길이를 운전할 것입니다. 다음 동영상은 코드 베이스가 퍼레이드에서 주행할 때 어떻게 움직여야 하는지를 보여줍니다. 애니메이션에서 코드 베이스는 연결된 다섯 개의 타일을 따라 직선으로 주행하며, 끝에 도달하면 이동한 총 거리를 나타내는 선이 나타납니다.
동영상 파일
- 학생들을 위한 모델 모델 VEXcode GO에서 프로젝트를 시작하는 방법.
- 먼저 학생들에게 코드 베이스의 두뇌를 VEXcode GO의 장치에 연결하는 방법을 보여줍니다. 연결 단계는 기기마다 다르므로 VEX GO Brain을 컴퓨터나 태블릿에 연결하는 구체적인 단계는 VEXcode GO에 연결하기 기사섹션을 참조하세요.
- 연결되면 퍼레이드 플로트 예제 프로젝트를 열고 프로젝트 코딩을 시작합니다. 이렇게 하려면 도구 모음에서 '파일' 을 선택한 다음 '예제 열기' 를 선택합니다. 그런 다음 '퍼레이드 플로트' 예제 프로젝트를 선택합니다.
-
아래 영상을 시청하여 VEXcode GO에서 퍼레이드 플로트 예제 프로젝트를 여는 방법을 알아보세요. GO 도구 모음의 파일 메뉴를 열고 드롭다운에서 '예제 열기'라고 적힌 네 번째 항목을 클릭합니다. GO 예제 프로젝트 메뉴가 열리고 퍼레이드 플로트 프로젝트가 선택되어 로드됩니다.
동영상 파일 - 학생들에게 추가 지원이 필요한 경우, VEXcode GO의 '예제 사용' 튜토리얼을 시청하여 예제 프로젝트와 템플릿을 사용하는 방법에 대한 지침을 얻으세요.
-
 예제 튜토리얼
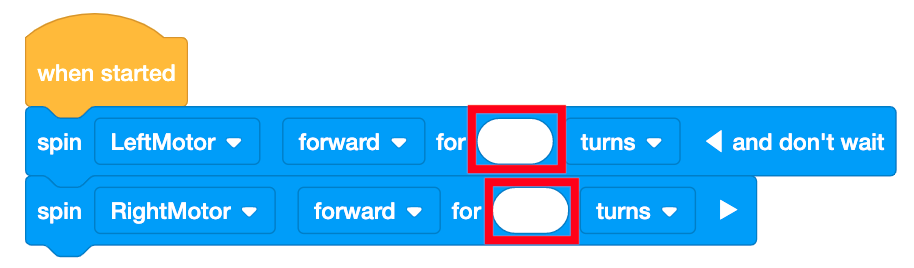
예제 튜토리얼 사용 - 그런 다음, 플레이 파트 1에서 얻은 솔루션을 [스핀] 블록의 매개변수에 입력하게 합니다.
퍼레이드 플로트 랩 4 프로젝트 스타터 - 학생들에게 자신의 프로젝트를 퍼레이드 플로트 랩 4로 명명하고 장치에 저장하게 한다. VEXcode GO 프로젝트를 저장하기 위한 장치별 단계는 VEXcode GO STEM 라이브러리의 열기 및 저장 섹션을 참조하세요..
퍼레이드 루트에서 프로젝트를 테스트하는 방법을 학생들에게 모델링합니다.
참고 : 두 번째 모터 블록은 첫 번째 블록이 완료될 때까지 기다리기 때문에 프로젝트가 예상대로 실행되지 않을 수 있으므로 블록의 "및 기다리지 마십시오" 를 열어 두십시오.
-
먼저 아래 이미지와 같이 로봇을 시작 지점에 배치하는 방법을 보여줍니다. 바퀴의 파란색 스탠드오프를 사용하여 바퀴의 중앙을 출발선의 앞쪽 가장자리에 맞추세요.
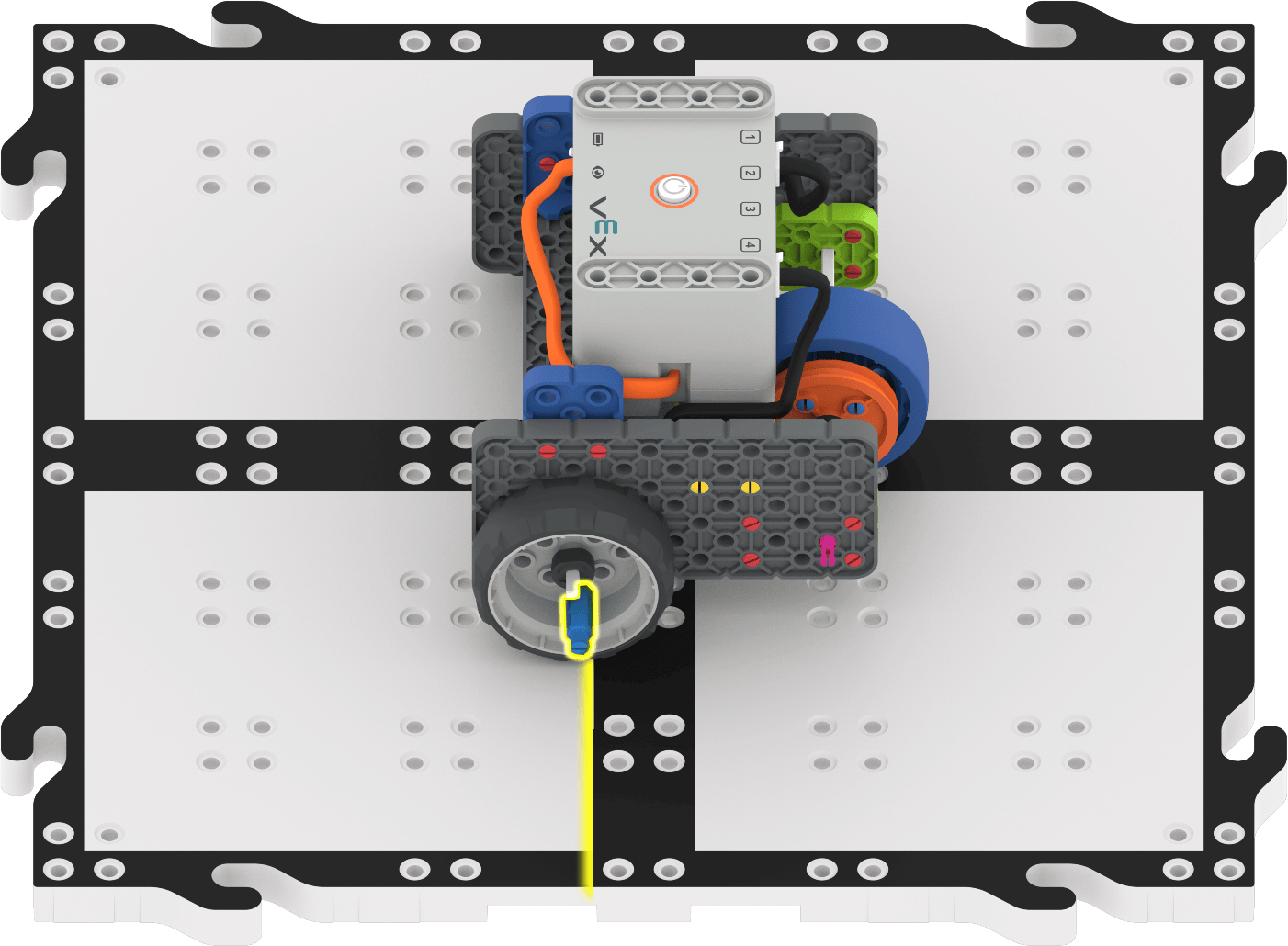
파란색 스탠드오프를 사용하여 코드 베이스를 퍼레이드 경로의 시작에 맞추기 - 코드 베이스가 준비되면 VEXcode GO에서 '시작' 을 선택하여 프로젝트를 테스트합니다.
 프로젝트를 테스트하려면
프로젝트를 테스트하려면 '시작' 을 선택하세요. - 학생들은 프로젝트를 중지하려면 VEXcode GO 도구 모음에서 '중지' 버튼을 선택해야 합니다.
- 학생들이 프로젝트를 테스트하고 업데이트하고 필요한 경우 다시 테스트할 수 있도록 시간을 준다.
- 학생들이 퍼레이드 경로에서 프로젝트를 테스트할 기회를 가진 후, 퍼레이드 수레 첨부 파일을 코드 베이스에 추가하고 모든 그룹이 차례로 프로젝트를 진행하는 전체 학급 퍼레이드에 참여하게 합니다.
- 일찍 끝내고 추가적인 도전이 필요한 학생에게는 로봇을 코딩하여 더 먼 거리를 주행하게 하세요. 학생들에게 다음과 같은 시나리오를 제시하세요.
- 퍼레이드 경로가 60인치 (152cm) 로 확장되었습니다. 코드가 여전히 작동하나요? Code Base가 새로운 퍼레이드 경로의 전체 길이를 구동하도록 하려면 무엇을 변경해야 합니까?
- 촉진 학생이 다음과 같은 질문으로 프로젝트를 구축하고 테스트할 때 학생들과의 대화를 촉진합니다.
- 로봇이 정확한 거리를 주행했나요? 왜 그럴까요? 아니면 그렇지 않을까요?
- [Spin for] 블록에 어떤 정보를 입력하고 계신가요? 이 번호는 어디에서 왔나요?
학생들이 프로젝트를 테스트할 때 문제 해결 전략을 촉진한다. 학생들은 기본적으로 코드 베이스를 사용하여 자신의 작업을 검토하고, 이를 통해 필요한 턴 수를 올바르게 계산했는지 확인하고 해당 정보를 [스핀 대상] 블록에 올바르게 입력해야 합니다. 학생들이 일할 때 질문하고 피드백을 제공하되, 이 실습 활동을 진행할 때 학생들에게 답을 주지 마십시오. 학생들이 작업할 때 지도하고, 답을 주지 않고도 효과적인 피드백을 제공하는 방법에 대한 전략은 이 기사 을 참조하세요.
코드 베이스가 충분히 멀리까지 나아가지 않거나 너무 멀리 나아가는 경우 학생들에게 [Spin for] 블록의 입력을 확인하고 솔루션을 올바르게 입력했는지 확인하세요.
- [Spin for] 블록의 값이 솔루션과 동일한가요? 소수가 올바른 위치에 있습니까?
- [Spin for] 블록의 값이 모두 같나요?
코드 베이스가 올바른 거리를 주행하지 않고 모든 입력이 정확하다면, 이는 그들의 솔루션(필요한 바퀴 회전 수)이 잘못되었다는 것을 의미합니다. 1부 놀이에서 계산한 내용을 확인하도록 지도하세요.
사용된 측정 단위에 따라 또는 반올림 측정 시 약간의 차이로 인해 용액에 변동이 있을 수 있습니다. 다음은 해결책의 한 예입니다.
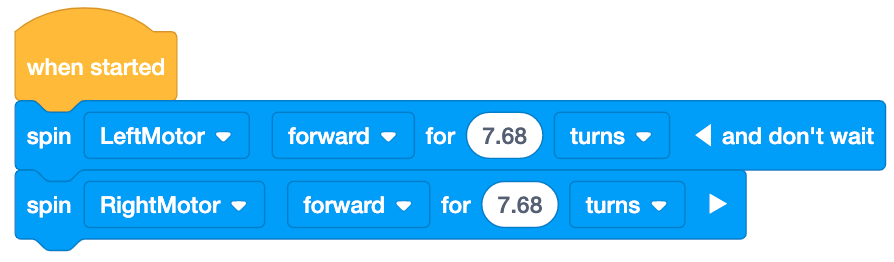
가능한 해결책 - 학생들에게프로젝트를 실행하는 데 여러 번의 시도가 필요할 수 있음을 상기시킨다. 시행착오는 테스트 과정의 일부이며 코딩의 중요한 부분임을 상기시킵니다.
- 로봇이 너무 멀리 갔나요? 아니면 충분히 멀지 않나요? 왜 그런 일이 일어났다고 생각하시나요?
- Code Base가 퍼레이드 경로의 거리를 더 정확하게 유도하기 위해 프로젝트에서 무엇을 변경할 수 있습니까?
- 학생들에게 코딩 로봇이 정밀하게 움직이는 것이 다른 영역에서 어떻게 유용할 수 있는지 물어본다.
- 실제 퍼레이드 플로트가 경로의 거리를 올바르게 이동하는 것이 중요한 이유는 무엇인가요? 그렇지 않으면 어떻게 될까요?
- 정확한 거리를 주행하고, 특정 경로를 따라갈 수 있는 로봇이 있다면 어떨까요? 이 로봇을 어떻게 집에서 도움을 줄 수 있을까요? 아니면 학교에서?