
काम पर लगाना
संलग्न अनुभाग लॉन्च करें
ACTS वह है जो शिक्षक करेगा और ASKS वह है कि शिक्षक किस प्रकार सुविधा प्रदान करेगा।
| अधिनियमों | आह्वान |
|---|---|
|
|
छात्रों को निर्माण के लिए तैयार करना
आइए सुनिश्चित करें कि हमारे पास परेड मार्ग पर सफलतापूर्वक यात्रा करने के लिए रोबोट को कोड करने हेतु सभी चीजें तैयार हैं।
- यदि छात्रों के पास पिछली लैब से कोड बेस 2.0 नहीं है, तो छात्रों को लैब गतिविधियों से पहले इसे बनाने के लिए 10-15 मिनट का समय दें।
निर्माण को सुगम बनाना
-
निर्देश
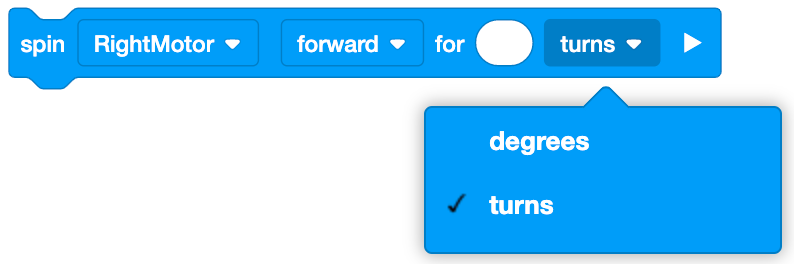
छात्रों को निर्देश दें कि वे परेड मार्ग की सटीक लंबाई को चलाने के लिए अपने रोबोट को कोड करने के लिए एक साथ काम करने जा रहे हैं, और आप ऐसा करने के लिए कुछ मिनट खर्च करने जा रहे हैं। पांच संलग्न टाइलों को एक केंद्रीय स्थान पर रखें, जिससे छात्रों को परेड मार्ग दिखाई दे। दूरी को मापें और सुनिश्चित करें कि छात्रों को परेड मार्ग की लंबाई (48 इंच / 122 सेमी) पता हो। नीचे दिए गए एनीमेशन को देखें कि कोड बेस रोबोट को परेड मार्ग पर सही ढंग से कैसे यात्रा करनी चाहिए। एनीमेशन में कोड बेस पांच टाइलों के बीच से सीधे गुजरता है, और जब वह अंत तक पहुंचता है तो एक रेखा दिखाई देती है जो यह बताती है कि उसने कितनी दूरी तय की है।
वीडियो फाइल
-
वितरित करेंप्रत्येक समूह को एक पूर्व-निर्मित कोड बेस 2.0 और एक कंप्यूटर या टैबलेट, साथ ही एक ब्लू स्टैंडऑफ, एक मापने वाला उपकरण जैसे कि एक रूलर या एक प्रिंटेबल VEX GO रूलर, कागज और एक पेंसिल वितरित करें
छात्रों को सामग्री और कार्यस्थल को स्पष्ट रूप से देखने में सक्षम होना चाहिए।
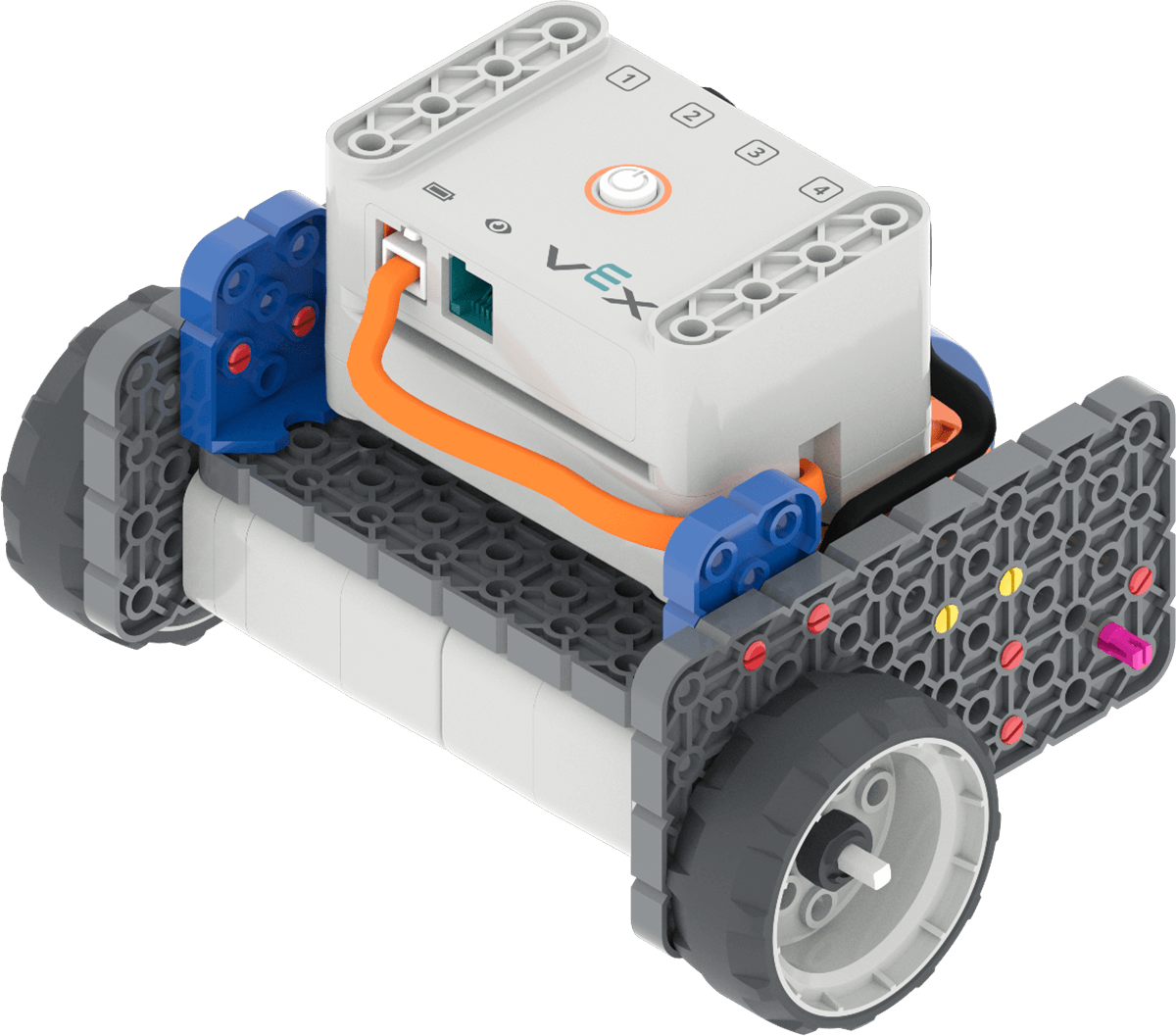
कोड बेस 2.0 - सुविधा प्रदान करना छात्रों को कोड बेस रोबोट से एक ग्रे व्हील को हटाने और इस छवि में दिखाए गए अनुसार पहिये में एक ब्लू स्टैंडऑफ लगाने का प्रदर्शन करके एक पहिया मोड़ की दूरी को मापने के लिए तैयार होने में सुविधा प्रदान करना।
-
प्रस्ताव
विद्यार्थियों को उनके कोई भी प्रश्न पूछने का अवसर प्रदान करें।

पहिया घुमाव की दूरी मापने के लिए सेटअप

शिक्षक समस्या निवारण
- अपने पोर्ट की जांच करें - विद्यार्थियों को याद दिलाएं कि वे सुनिश्चित करें कि उनकी दाहिनी मोटर पोर्ट 1 में लगी है, तथा उनकी बाईं मोटर पोर्ट 4 में लगी है।
- कनेक्ट - सभी GO ब्रेन्स को VEX क्लासरूम ऐप से लैब शुरू करने से पहले कनेक्ट करें ताकि आपकी कक्षा में VEX GO के उपयोग को सुविधाजनक बनाने में मदद मिल सके।
- अपनी बैटरियों की जांच करें - GO बैटरियोंकी स्थिति की जांच करने के लिए VEX क्लासरूम ऐप या संकेतक लाइट का उपयोग करें, और लैब से पहले यदि आवश्यक हो तो चार्ज करें।
- कनेक्ट करने में समस्या निवारण - यदि छात्रों को Play भाग 2 में अपने कोड बेस को अपने कंप्यूटर या टैबलेट से कनेक्ट करने में समस्या हो रही है, तो कोड बेस को उपयोग किए जा रहे डिवाइस से कनेक्ट करने के तरीके के बारे में विवरण देखने के लिए VEXcode GO से कनेक्ट करें लेखदेखें।
सुविधा रणनीतियाँ
- इस बारे में सोचें कि आपके छात्र Play भाग 2 में VEXcode GO तक कैसे पहुंचेंगे। सुनिश्चित करें कि जिन कंप्यूटरों या टैबलेटों का उपयोग छात्र करेंगे, उनमें VEXcode GO तक पहुंच हो। VEXcode GO को सेट अप करने के बारे में अधिक जानकारी के लिए, यह आलेखदेखें।
- कक्षा से पहले प्रत्येक समूह के लिए आवश्यक सामग्री एकत्रित करें। इस लैब के लिए, दो छात्रों के प्रत्येक समूह को एक GO किट, निर्माण निर्देश, VEXcode GO तक पहुंचने के लिए एक कंप्यूटर या टैबलेट, अपने कोडिंग प्रोजेक्ट का परीक्षण करने के लिए परेड मार्ग तक पहुंच, एक पेंसिल, कागज, एक नीला स्टैंडऑफ और एक शासक, जैसे कि VEX GO प्रिंटेबल रूलरकी आवश्यकता होगी।
- अपना परेड मार्ग पहले से तय कर लें, जैसा कि नीचे दी गई छवि में दिखाया गया है। परेड मार्ग 5 GO टाइल्स से बनाया जा सकता है। नीचे दी गई छवि में लाल रेखाएं 48 इंच (122 सेमी) परेड मार्ग की आरंभिक और अंतिम रेखाएं दर्शाती हैं। आप चाहें तो प्ले पार्ट 2 में छात्रों द्वारा अपने प्रोजेक्ट का परीक्षण करने के लिए कमरे के चारों ओर कई परेड मार्ग स्थापित कर सकते हैं, ताकि एक ही समय में कई समूह परीक्षण कर सकें।
