
เล่น
ส่วนที่ 1 - ทีละขั้นตอน
- สั่งให้สั่งให้นักเรียนวัดระยะทางที่ฐานโค้ดจะเคลื่อนที่ได้โดยหมุนล้อหนึ่งรอบ
จากนั้นพวกเขาจะใช้ข้อมูลนั้นเพื่อสร้างแผนในการเขียนโค้ดให้หุ่นยนต์เคลื่อนที่ได้อย่างแม่นยำตลอดความยาวของเส้นทางขบวนพาเหรด
ประสบการณ์ของนักเรียนในการวัดระยะทางของการหมุนของล้อหนึ่งครั้งร่วมกับคำติชมและคำถามของครูจะกระตุ้นให้นักเรียนตระหนักว่าพวกเขาสามารถใช้ข้อมูลนี้เพื่อกำหนดจำนวนรอบของล้อในเส้นทางขบวนพาเหรดทั้งหมด จากนั้นจึงป้อนข้อมูลนั้นลงในบล็อก [หมุนสำหรับ] เมื่อพวกเขาสร้างโค้ดในภายหลังในห้องปฏิบัติการ ดูส่วนอำนวยความสะดวกเพื่อดูข้อเสนอแนะ - แบบจำลองที่แบบจำลองสำหรับให้นักเรียนตั้งค่าวัดระยะทางการหมุนของล้อหนึ่งรอบ
ชมวิดีโอด้านล่างเพื่อดูวิธีจัดตำแหน่งล้อบนไม้บรรทัดและหมุนเพื่อวัดการหมุนของล้อ
ไฟล์วีดีโอ
- นักเรียนควรใช้ขั้นตอนต่อไปนี้ในการวัดระยะทางของการหมุนล้อหนึ่งครั้ง (ตามที่แสดงในวิดีโอด้านบน)
-
ขั้นแรก ให้ถอด Gray Wheel หนึ่งอันออกจาก Code Base แล้วติด Standoff สีน้ำเงินเข้าไป คุณจะใช้สิ่งนี้เป็นแนวทางภาพเพื่อดูการหมุนวงล้อหนึ่งครั้ง

ใส่สแตนด์ออฟสีน้ำเงินเข้าในล้อสีเทา - จากนั้นจัดตำแหน่งสแตนด์ออฟให้ตรงกับจุดเริ่มต้นที่ทำเครื่องหมายไว้บนกระดาษหรือบนอุปกรณ์วัด
- ขั้นตอนต่อไปคือ ใช้มือหมุนวงล้อจนกระทั่ง Blue Standoff หมุนครบ 1 รอบและกลับสู่จุดเริ่มต้น
- สุดท้ายวัดระยะทางแล้วจดบันทึกไว้ นี่คือระยะทางที่หุ่นยนต์จะหมุนเมื่อหมุนล้อหนึ่งครั้ง
- นักเรียนควรปัดเศษการวัดเป็นทศนิยมหนึ่งหลักที่ใกล้เคียงที่สุด
- อาจมีการวัดที่แตกต่างกันเล็กน้อย ต่อไปนี้เป็นตัวอย่างหนึ่ง: (1 รอบ = 6.25 นิ้ว (16 ซม.))
- นักเรียนสามารถปัดเศษลงเป็น 6 นิ้วได้หากไม่คุ้นเคยกับเศษส่วนหรือทศนิยม โปรดทราบว่าสิ่งนี้จะส่งผลต่อความแม่นยำในการขับเคลื่อน Code Base
-
- นักเรียนควรใช้ขั้นตอนต่อไปนี้ในการวัดระยะทางของการหมุนล้อหนึ่งครั้ง (ตามที่แสดงในวิดีโอด้านบน)
-
อำนวยความสะดวกอำนวยความสะดวกในการสนทนากับนักเรียนเพื่อให้พวกเขามีโอกาสแบ่งปันความคิดและทำความเข้าใจว่าพวกเขาจะใช้ระยะทางของการหมุนล้อหนึ่งครั้งเพื่อวางแผนในการเขียนโค้ดหุ่นยนต์เพื่อเดินทางในระยะทางที่แน่นอนของเส้นทางขบวนพาเหรดได้อย่างไร
ขณะที่นักเรียนทำงาน ให้ถามคำถามและให้ข้อเสนอแนะเพื่อช่วยให้พวกเขาทำการวัดให้เสร็จสมบูรณ์ รวมถึงแนะนำให้พวกเขาเข้าใจว่าพวกเขาสามารถใช้การวัดนี้เพื่อเขียนโค้ดให้หุ่นยนต์เคลื่อนที่ในระยะทางที่แน่นอนได้
- การหมุนล้อของคุณหนึ่งครั้งมีกี่นิ้วหรือเซนติเมตร?
- หากล้อของคุณเคลื่อนที่เป็นระยะทางหนึ่ง (6.25 นิ้ว หรือ 16 ซม.) ในหนึ่งรอบล้อ ล้อของคุณจะเคลื่อนที่ไปได้ไกลแค่ไหนหากหมุน 2 ล้อ? หรือ 1.5 รอบ?
- ตอนนี้คุณทราบระยะทางของการหมุนของล้อหนึ่งรอบแล้ว เราจะใช้ข้อมูลนี้เพื่อเขียนโค้ดให้หุ่นยนต์ เดินทางตลอดเส้นทางขบวนพาเหรด (48 นิ้วหรือ 122 ซม.) ได้อย่างไร
- เตือนใจเตือนใจนักเรียนว่าเนื่องจากนี่เป็นกิจกรรมปลายเปิด
สมาชิกในกลุ่มจึงอาจไม่มีความคิดเหมือนกัน
และสิ่งสำคัญคือต้องยอมรับกระบวนการในการบรรลุข้อตกลงเกี่ยวกับแนวทางแก้ปัญหา
- กลุ่ม ของคุณมีความคิดอย่างไรเกี่ยวกับการใช้ ที่คุณเรียนรู้จากการวัดระยะทางของล้อหนึ่งรอบเพื่อช่วยคุณเขียนโค้ดหุ่นยนต์ให้เดินทางตลอดเส้นทางขบวนพาเหรด?
- คุณตัดสินใจเลือกโซลูชั่น ตัวไหนและทำไม?
- หากคุณมีความคิดที่แตกต่างกัน คุณจะตกลงกันได้อย่างไรว่าวิธีใดดีที่สุด?
-
ถามถามนักเรียนว่าการวัดและการคำนวณระยะทางสามารถเป็นประโยชน์ในชีวิตประจำวันของพวกเขาได้อย่างไร
- คุณเคยต้องวางแผนเส้นทางหรือค้นหาเส้นทางจากสถานที่หนึ่งไปอีกสถานที่หนึ่งหรือไม่? คุณวัดและคำนวณระยะทางได้อย่างไร?
- มีเครื่องมืออื่นใดอีกบ้างที่คุณสามารถใช้วัดระยะทางได้?
พักเบรกกลางเกม & อภิปรายเป็นกลุ่ม
ทันทีที่กลุ่ม แต่ละกลุ่มมีเวลาคำนวณจำนวนรอบที่จำเป็นในการขับเคลื่อน Code Base ไปตามเส้นทางขบวนพาเหรดให้มารวมตัวกันเพื่อสนทนาสั้นๆ ครั้ง
ให้โอกาสแก่นักเรียนในการแบ่งปันแนวทางแก้ปัญหาและวิธีการของตนเอง นี่คือเวลาที่จะตรวจสอบความเข้าใจและแก้ไขความเข้าใจผิดใดๆ ที่นักเรียนอาจมี แนะนำให้นักเรียนแบ่งปันความคิดของตนด้วยคำแนะนำเหล่านี้:
- กลุ่มของคุณวัดระยะทาง ของการหมุนล้อหนึ่งครั้งได้เท่าไร
- กลุ่มของคุณใช้ข้อมูลนี้ในการคำนวณว่าต้องหมุนล้อกี่รอบในพารามิเตอร์ ในบล็อก [Spin for] เพื่อเขียนโค้ดให้หุ่นยนต์เดินทางด้วยระยะทางที่แน่นอนได้อย่างไร
- ทำไมคุณถึงคิดว่านี่คือทางออกที่ดีที่สุด?
ตอนที่ 2 - ทีละขั้นตอน
- สอนสอนนักเรียนว่าพวกเขาจะใช้โซลูชันจาก Play Part 1
เพื่อเขียนโค้ดฐานโค้ดเพื่อเข้าร่วมขบวนพาเหรด! ก่อนอื่นพวกเขาจะสร้างโครงการ VEXcode GO
จากนั้นป้อนจำนวนรอบของวงล้อ จากนั้นพวกเขาจะทดสอบโครงการของพวกเขาด้วย Code Base หากการคำนวณของพวกเขาถูกต้อง
หุ่นยนต์ของพวกเขาจะขับเคลื่อนไปตามเส้นทางขบวนพาเหรด วิดีโอด้านล่างนี้แสดงให้เห็นว่า Code Base
ควรเคลื่อนไหวอย่างไรเมื่อขับเคลื่อนในขบวนพาเหรด
ไฟล์วีดีโอ
- โมเดลโมเดลสำหรับนักเรียนที่จะเริ่มต้นโปรเจ็กต์ใน VEXcode GO
- เริ่มต้นด้วยการแสดงให้ผู้เรียนเห็นถึงวิธีการเชื่อมต่อ Brain บน Code Base ของพวกเขาเข้ากับอุปกรณ์ใน VEXcode GO เนื่องจากขั้นตอนการเชื่อมต่อจะแตกต่างกันไปในแต่ละอุปกรณ์ โปรดดูหัวข้อที่ กำลังเชื่อมต่อกับรหัส VEX GO บทความ สำหรับขั้นตอนเฉพาะในการเชื่อมต่อ VEX GO Brain กับคอมพิวเตอร์ของคุณหรือ แท็บเล็ต.
- เมื่อเชื่อมต่อแล้ว พวกเขาจะเปิดโครงการตัวอย่าง Parade Float และเริ่มเขียนโค้ดโครงการของพวกเขา
ในการดำเนินการดังกล่าว ให้เลือก 'ไฟล์' จากแถบเครื่องมือ จากนั้นเลือก 'เปิดตัวอย่าง'
จากนั้นเลือกโครงการตัวอย่าง 'Parade Float'
-
ชมวิดีโอด้านล่างเพื่อดูวิธีเปิดโครงการตัวอย่าง Parade Float ใน VEXcode GO
ไฟล์วีดีโอ - หากนักเรียนต้องการการสนับสนุนเพิ่มเติม ให้พวกเขาดูแบบฝึกสอนการใช้ตัวอย่างใน VEXcode GO
เพื่อดูคำแนะนำเกี่ยวกับการใช้โปรเจ็กต์และเทมเพลตตัวอย่าง
-
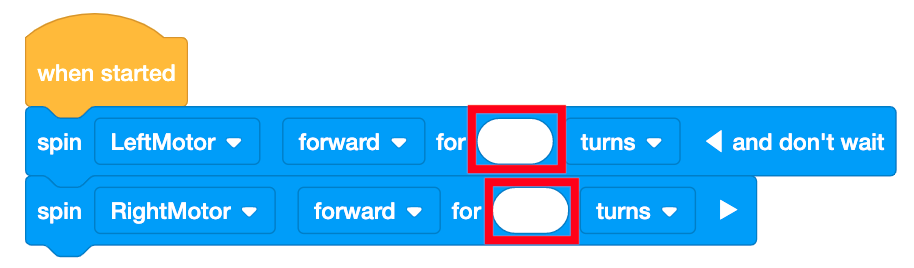
การใช้ตัวอย่างบทช่วยสอน - จาก ให้พวกเขาป้อนโซลูชันจาก Play Part 1 ลงในพารามิเตอร์ของบล็อก [Spin for]
Parade Float Lab 4 ผู้เริ่มโครงการ - ให้เด็กนักเรียนตั้งชื่อโปรเจ็กต์ของตนเองว่า Parade Float Lab 4 และบันทึกลงในอุปกรณ์ของตน ดูเปิด และบันทึกส่วนของ VEXcode GO STEM Library สำหรับขั้นตอนเฉพาะอุปกรณ์ในการบันทึก VEXcode GO โครงการ.
แบบจำลองสำหรับให้นักเรียนทดสอบโครงการของตนบนเส้นทางขบวนพาเหรด
หมายเหตุ: ตรวจสอบให้แน่ใจว่าคุณเปิด "และอย่ารอ" ของบล็อกไว้ มิฉะนั้น โปรเจ็กต์ของคุณอาจไม่ทำงานตามที่คาดไว้ เนื่องจากบล็อกมอเตอร์ตัวที่สองจะรอจนกว่าบล็อกแรกจะเสร็จสิ้น
-
ขั้นแรก ให้พวกเขาแสดงวิธีการวางหุ่นยนต์ที่จุดเริ่มต้นตามที่แสดงในภาพด้านล่าง ใช้ขาตั้งสีน้ำเงินบนล้อเพื่อช่วยจัดตำแหน่งศูนย์กลางของล้อให้ตรงกับขอบด้านหน้าของเส้นเริ่มต้น
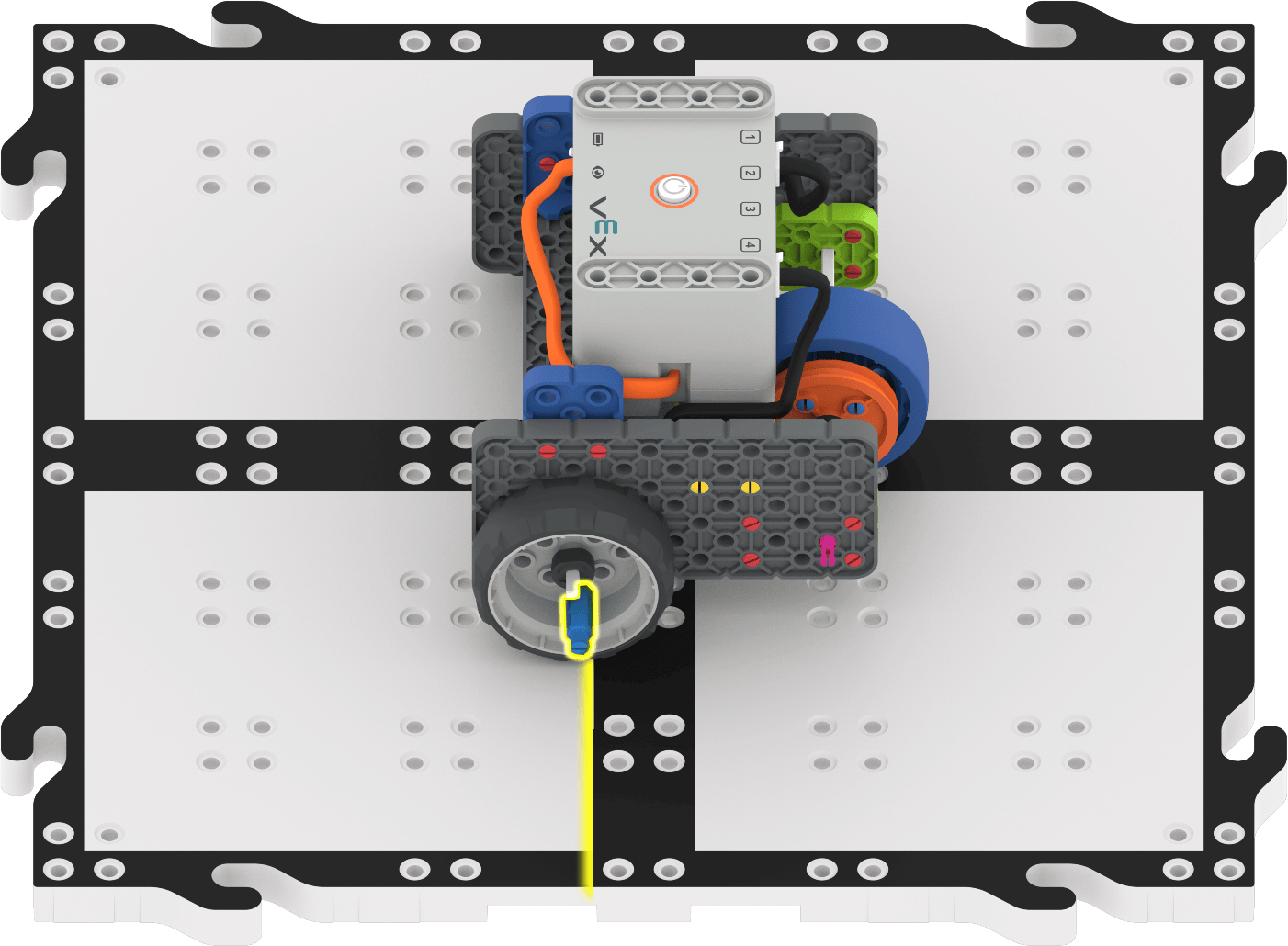
การจัดตำแหน่งฐานรหัสให้ตรงกับจุดเริ่มต้นของเส้นทางขบวนพาเหรดโดยใช้ Blue Standoff - เมื่อฐานโค้ดพร้อมแล้ว ให้เลือก "เริ่ม" ใน VEXcode GO เพื่อทดสอบโครงการ
เลือกเริ่มทดสอบโครงการ - นักเรียนจะต้องเลือกปุ่ม 'หยุด' ในแถบเครื่องมือ VEXcode GO เพื่อหยุดโครงการ
- จัดสรรเวลาให้นักศึกษาได้ทดสอบโครงการของตนและอัปเดต และทดสอบอีกครั้งหากจำเป็น
- เมื่อนักเรียนได้มีโอกาสทดสอบโครงการของตนในเส้นทางขบวนพาเหรด ให้นักเรียนเพิ่ม ที่แนบมากับขบวนพาเหรดลงในฐานโค้ด และเข้าร่วมขบวนพาเหรดทั้งชั้นเรียน รอบ โดยทุกกลุ่มจะผลัดกันดำเนินโครงการของตน
- สำหรับนักเรียนที่ทำเสร็จเร็วและต้องการความท้าทายเพิ่มเติม
ให้นักเรียนเขียนโค้ดหุ่นยนต์เพื่อขับระยะทางไกลขึ้น มอบสถานการณ์ต่อไปนี้ให้กับนักเรียน:
- เส้นทางขบวนพาเหรดได้รับการขยายเพิ่มเป็น 60 นิ้ว (152 ซม.) โค้ดของคุณยังใช้งานได้ไหม? คุณต้องเปลี่ยนแปลงอะไรบ้างเพื่อให้ Code Base ขับเคลื่อนไปตามเส้นทางขบวนพาเหรดใหม่จนเต็มความยาว?
-
อำนวยความสะดวกอำนวยความสะดวกในการสนทนากับนักเรียนในขณะที่พวกเขาสร้างและทดสอบโครงการของพวกเขาด้วยคำถามเช่น:
- หุ่นยนต์ของคุณขับได้ระยะทางที่ถูกต้องหรือเปล่า? ทำไมหรือทำไมไม่?
- คุณป้อนข้อมูลอะไรลงในบล็อค [หมุนเพื่อ] ตัวเลขนี้มาจากไหน?
อำนวยความสะดวกในการแก้ไขปัญหาในขณะที่นักศึกษาทำการทดสอบโครงการของพวกเขา โดยทั่วไปแล้ว นักเรียนจะใช้ Code Base เพื่อตรวจสอบงานของตน และเมื่อทำเช่นนั้น พวกเขาจะต้องตรวจสอบให้แน่ใจว่า คำนวณจำนวนรอบที่จำเป็นถูกต้องแล้ว และป้อนข้อมูลดังกล่าวลงในบล็อก [หมุนสำหรับ] อย่างถูกต้อง ถามคำถามและให้ข้อเสนอแนะในขณะที่นักเรียนทำงาน แต่หลีกเลี่ยงการให้คำตอบแก่นักเรียนในขณะที่คุณอำนวยความสะดวกในการดำเนินกิจกรรมในห้องปฏิบัติการนี้ ดูบทความนี้ สำหรับกลยุทธ์ในการชี้แนะนักเรียนในขณะที่ทำงานและให้ ข้อเสนอแนะที่มีประสิทธิภาพโดยไม่ต้องให้คำตอบ.
หากฐานโค้ดไม่ขับเคลื่อนไปไกลพอ หรือขับเคลื่อนไกลเกินไป ให้ให้ผู้เรียนตรวจสอบอินพุตของบล็อก [หมุนสำหรับ] และตรวจสอบว่าพวกเขาป้อนโซลูชันอย่างถูกต้อง
- ค่าในบล็อค [Spin for] เท่ากับโซลูชันของคุณหรือไม่ ทศนิยมอยู่ในตำแหน่งที่ถูกต้องหรือเปล่า?
- ค่าในบล็อค [หมุนเพื่อ] ทั้งสองมีค่าเท่ากันหรือไม่
หากฐานโค้ดไม่สามารถขับเคลื่อนระยะทาง ที่ถูกต้อง และอินพุต ทั้งหมดมีความถูกต้อง นั่นหมายความว่าโซลูชัน (จำนวนรอบของล้อที่ต้องการ) ไม่ถูกต้อง แนะนำให้ตรวจสอบการคำนวณจาก Play Part
อาจมีการเปลี่ยนแปลงของวิธีการแก้ปัญหาขึ้นอยู่กับหน่วยการวัดที่ใช้หรืออาจมีการเปลี่ยนแปลงเล็กน้อยเมื่อปัดเศษการวัด ต่อไปนี้เป็นตัวอย่างหนึ่งของวิธีแก้ปัญหา
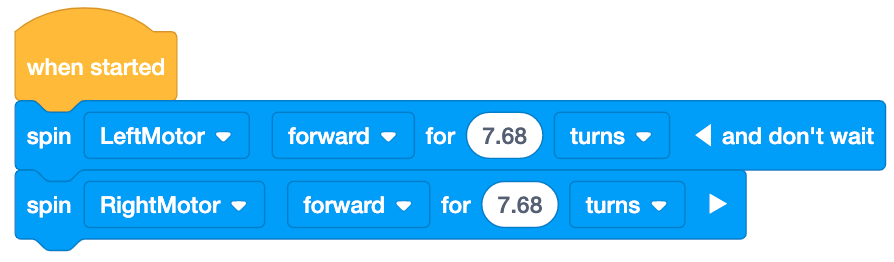
วิธีแก้ปัญหาที่เป็นไปได้ - เตือนใจเตือนใจนักเรียนว่าอาจต้องใช้ความพยายามหลายครั้งจึงจะทำให้โครงการของพวกเขาสำเร็จ
เตือนพวกเขาว่าการลองผิดลองถูกเป็นส่วนหนึ่งของกระบวนการทดสอบ และเป็นส่วนสำคัญของการเขียนโค้ด
- หุ่นยนต์ของคุณไปไกลเกินไปหรือเปล่า? หรือไม่ไกลพอ? คุณคิดว่าทำไมถึงเกิดขึ้น?
- คุณสามารถเปลี่ยนแปลงอะไรได้บ้างในโครงการของคุณเพื่อให้ Code Base ขับเคลื่อนระยะทางของเส้นทางขบวนพาเหรดได้แม่นยำยิ่งขึ้น
-
ถามถามนักเรียนว่าการเขียนโค้ดให้หุ่นยนต์เคลื่อนไหวอย่างแม่นยำสามารถเป็นประโยชน์ในด้านอื่นๆ
ได้อย่างไร
- เหตุใดจึงสำคัญที่ขบวนแห่ที่แท้จริงต้องเดินทางตามระยะทางของเส้นทางอย่างถูกต้อง? ถ้าพวกเขาไม่ทำเช่นนั้นจะเกิดอะไรขึ้น?
- จะเป็นอย่างไรหากคุณมีหุ่นยนต์ที่สามารถขับได้ในระยะทางที่แน่นอนและวิ่งตามเส้นทางที่กำหนดได้ คุณจะใช้หุ่นยนต์ตัวนี้ช่วยคุณที่บ้านได้อย่างไร หรือที่โรงเรียน?