
खेल
भाग 1 - चरण दर चरण
- निर्देशछात्रों को निर्देश दें कि वे अपने कोड बेस रोबोट को आगे बढ़ाने का तरीका तलाशेंगे! परियोजना शुरू करने से पहले, वे अनुमान लगा लेंगे कि कोड बेस रोबोट कहां पहुंचेगा। कोड बेस के विभिन्न दूरियों तक आगे बढ़ने के उदाहरण देखने के लिए नीचे दिए गए एनीमेशन को देखें। एनीमेशन में, कोड बेस टाइल के निचले बाएं कोने से शुरू होता है और पहले 150 मिमी आगे बढ़ता है और रुक जाता है। इसके बाद यह पुनः प्रारंभिक स्थान पर आ जाता है, तथा 75 मिमी आगे जाकर रुक जाता है।
वीडियो फाइल
- मॉडलमॉडल, किसी डिवाइस पर VEXcode GO को कैसे लॉन्च करें और एक प्रोजेक्ट बनाएं जो कोड बेस को [Drive for] ब्लॉक के साथ आगे ले जाए।
- छात्रों को प्रोजेक्ट खोलें और सेव करेंVEX लाइब्रेरी लेख के चरणों का मॉडल दिखाएं और उन्हें अपने प्रोजेक्ट को खोलने और सेव करने के लिए चरणों का पालन करने को कहें।
- छात्रों को अपने प्रोजेक्ट का नाम फॉरवर्डरखने का निर्देश दें।
- इसके बाद छात्रों को अपने कोड बेस रोबोट के ब्रेन अपने डिवाइस से कनेक्ट करने को ।
- एक बार जब छात्र अपने प्रोजेक्ट का नाम रख लेते हैं और ब्रेन को अपने डिवाइस से जोड़ लेते हैं, तो उन्हें कोड बेस रोबोट के लिए कॉन्फ़िगर करने हेतु चरणों का पालन करना होगा। कोड बेस कॉन्फ़िगर करें VEX लाइब्रेरी लेख से चरणों का मॉडल बनाएं और सुनिश्चित करें कि छात्र टूलबॉक्स में ड्राइवट्रेन ब्लॉक देख सकें।
-
दिखाएँ कि [ड्राइव फॉर] ब्लॉक को वर्कस्पेस में कैसे खींचें और इसे {When started} ब्लॉक के नीचे कैसे रखें।
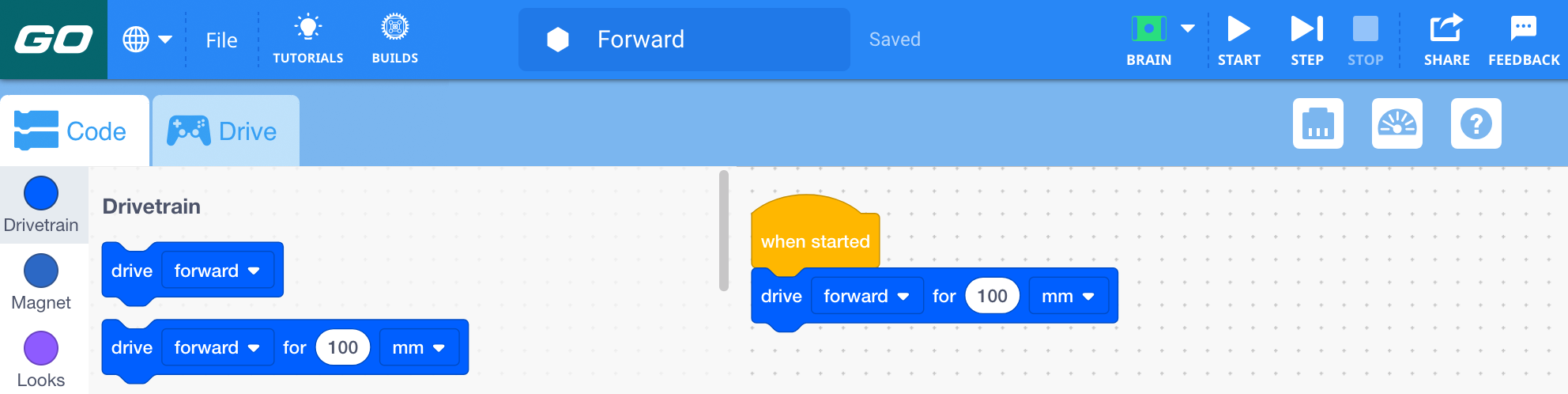
[ड्राइव के लिए] ब्लॉक जोड़ें -
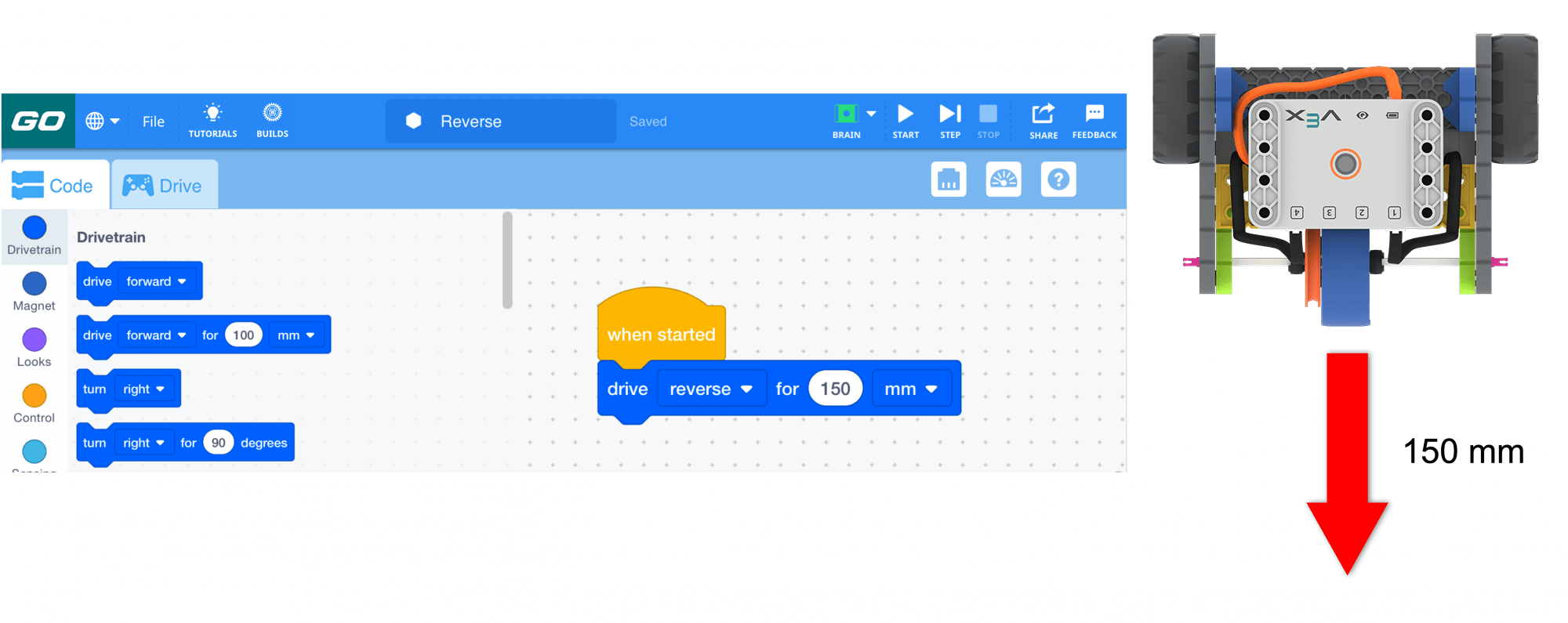
[ड्राइव फॉर] ब्लॉक के पैरामीटर को 150 मिमी में बदलें।
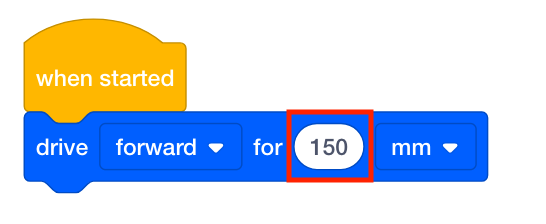
पैरामीटर बदलें - छात्रों के लिए मॉडल बनाएं कि [ड्राइव फॉर] ब्लॉक में मापदंडों के आधार पर कोड बेस रोबोट कितनी दूर तक जाएगा, इसका पूर्वानुमान कैसे लगाएं। छात्रों को कोड बेस को प्रारंभिक स्थिति में रखने को कहें, फिर अनुमान लगाएं कि रोबोट कितनी दूर तक जाएगा। उन्हें वहां एक मार्कर लगाना चाहिए जहां उनके अनुसार कोड बेस रुक जाएगा।
-
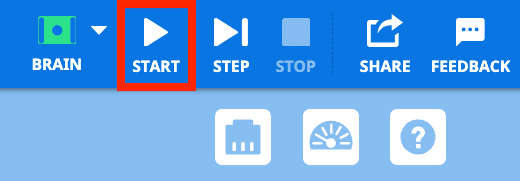
छात्रों को प्रोजेक्ट शुरू करने के लिए टूलबार में 'प्रारंभ' बटन का चयन करने का मॉडल दिखाएं।
- एक बार जब छात्र व्यवहार का अवलोकन कर लें, तो छात्रों को बताएं कि कैसे अपने प्रोजेक्ट पर वापस जाएं, [ड्राइव फॉर] ब्लॉक के मापदंडों को 150 मिमी से दूसरी दूरी पर संपादित करें, जैसे कि 200 मिमी या 250 मिमी। फिर, यह देखने के लिए कि पैरामीटरों में परिवर्तन ने कोड बेस रोबोट की गति को किस प्रकार प्रभावित किया है, प्रोजेक्ट को पुनः प्रारंभ करें।
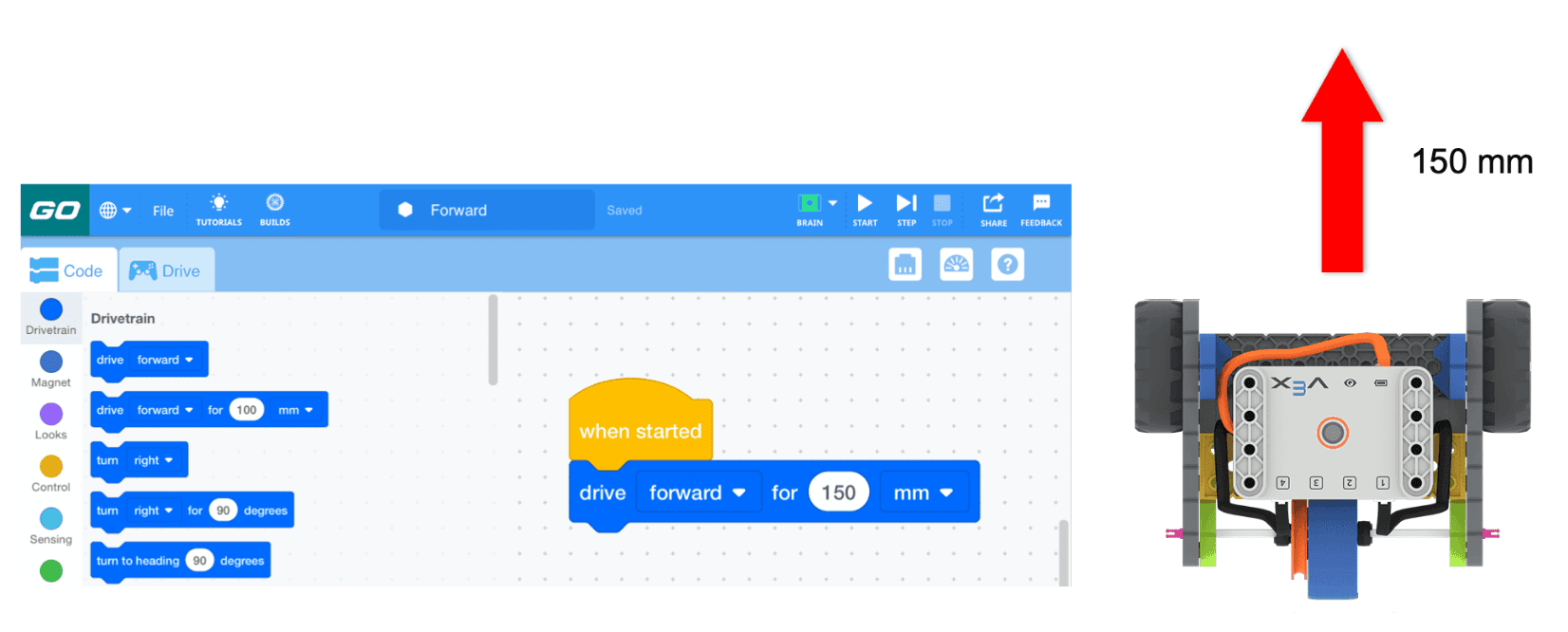
आगे 150 मिमी - सुविधा प्रदान करनानिम्नलिखित प्रश्न पूछकर छात्र के अवलोकन और परियोजना के लक्ष्यों के बारे में चर्चा को सुविधाजनक बनाएं:
- क्या आप मुझे अपने हाथों का उपयोग करके दिखा सकते हैं कि परियोजना शुरू करने से पहले आपने सोचा था कि कोड बेस रोबोट कितनी दूर तक चलेगा?
- आपने दूरी पैरामीटर को क्या बदला और क्यों? अब जब दूरी बदल दी गई है तो आपको क्या लगता है कि कोड बेस रोबोट कितनी दूर तक यात्रा करेगा?
- आपके अनुमान की तुलना में तय की गई दूरी कैसी थी?
- इस परियोजना के लिए आपने किस श्रेणी के ब्लॉक का उपयोग किया?

कोड बेस रोबोट की गतिविधि पर चर्चा करें - याद दिलाएंविद्यार्थियों को याद दिलाएं कि जब वे अपना प्रोजेक्ट बना रहे हों और उसे शुरू कर रहे हों तो उनके मन में प्रश्न आ सकते हैं। विद्यार्थियों को याद दिलाएं कि नई अवधारणाओं को सीखने में कई प्रयास लग सकते हैं और यदि वे पहली बार में असफल होते हैं तो उन्हें दोबारा प्रयास करने के लिए प्रोत्साहित करें।
- पूछेंविद्यार्थियों से यह सोचने के लिए कहें कि कोड बेस रोबोट को कक्षा में यात्रा करने के लिए कितनी दूरी तय करनी होगी। छात्रों को यह समझाने का प्रयास करें कि इस प्रकार की योजना रोजमर्रा के जीवन में क्यों उपयोगी है। विद्यार्थियों से पूछें कि योजना बनाने और सटीक निर्देश देने में सक्षम होना किसी नौकरी के लिए किस प्रकार उपयोगी हो सकता है? छात्रों से पूछें कि क्या वे ऐसी किसी नौकरी के बारे में सोच सकते हैं जहां निर्देशों की आवश्यकता हो?
खेल के बीच में ब्रेक & समूह चर्चा
जैसे ही प्रत्येक समूह अपना प्रोजेक्टपूरा कर ले, संक्षिप्त बातचीत के लिए एक साथ आ जाएं।
- क्या कोड बेस रोबोट वहीं पहुंचा जहां आपने सोचा था? यदि नहीं, तो यह आपकी भविष्यवाणी के कितने करीब था?
- आपने अपनी परियोजना का संपादन कैसे किया? आपने कौन सी नई दूरी चुनी?
- क्या आपको [ड्राइव फॉर] ब्लॉक में दूरी बदलने में कोई कठिनाई हुई?
ड्राइवट्रेन का परिचय:
- अब जब हमने यह पता लगा लिया है कि अपने कोड बेस रोबोट को आगे बढ़ाने के लिए VEXcode GO का उपयोग कैसे किया जाए, तो आपको क्या लगता है कि ब्लॉकों का एक "ड्राइवट्रेन" खंड क्यों है?
- आपके विचार में ड्राइवट्रेन क्या है? क्या आप अपनी सोच स्पष्ट कर सकते हैं?
- क्या आप मुझे इशारों का उपयोग करके दिखा सकते हैं कि आपके विचार से कोड बेस रोबोट पर ड्राइवट्रेन कहां है?
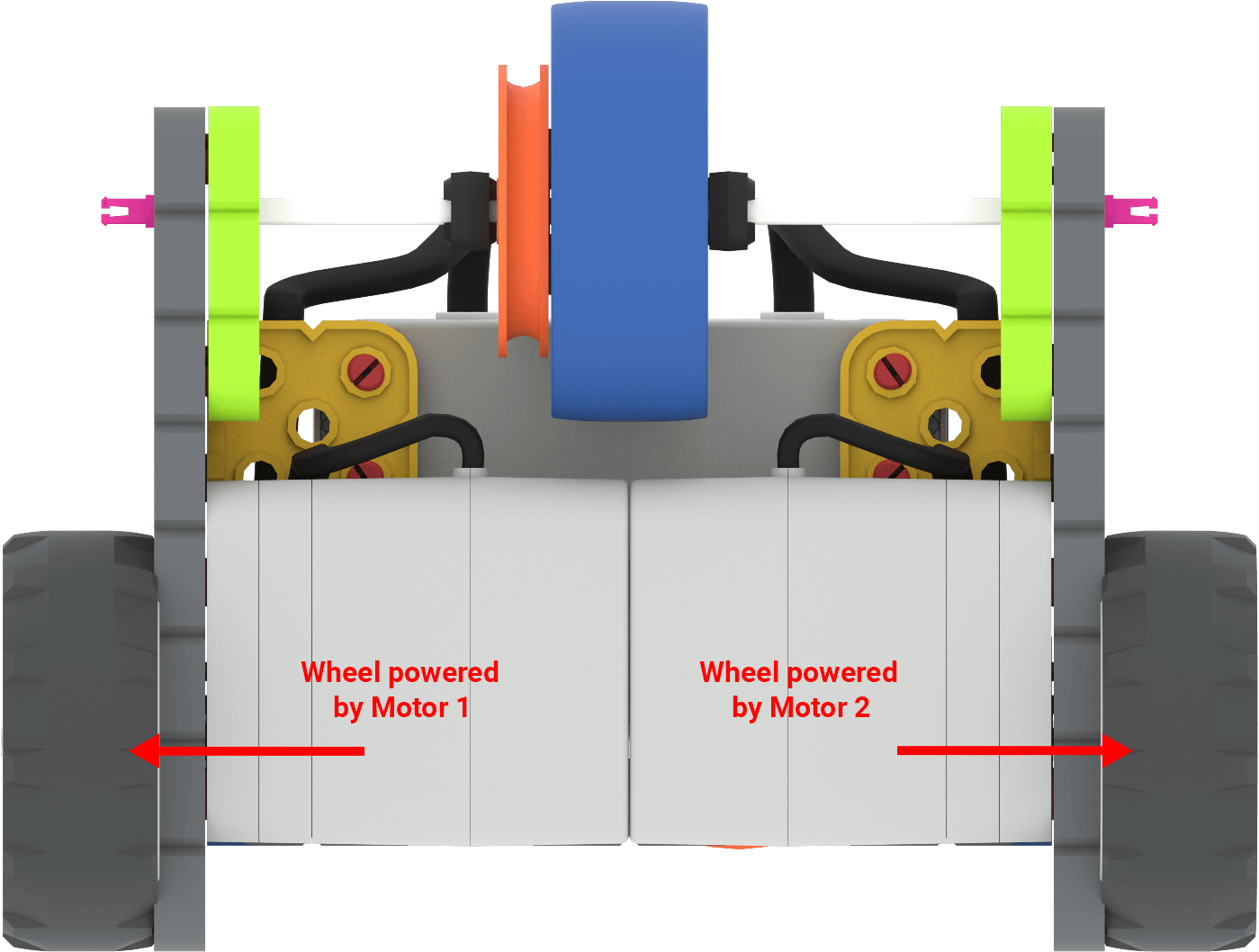
- क्या आप अपने कोड बेस रोबोट के निचले भाग को देखकर पहचान सकते हैं कि इस ड्राइवट्रेन में मोटरें कहां हैं, तथा वे किन पहियों से जुड़ी हैं?
भाग 2 - चरण दर चरण
- निर्देशछात्रों को निर्देश दें कि वे अपने कोड बेस रोबोट को आगे और पीछे कैसे ले जाएं, इसका पता लगाएंगे!
आरंभ करने के लिए, प्रत्येक समूह के पास एक डिवाइस, VEXcode GO, कम से कम एक प्लेसमेंट मार्कर और एक निर्मित कोड बेस होना चाहिए। नीचे दिए गए एनीमेशन को देखें कि कोड बेस किस प्रकार विपरीत दिशा में चलता है। एनीमेशन में, कोड बेस टाइल के ऊपरी बाएं कोने से शुरू होता है, और 150 मिमी पीछे की ओर चलता है, फिर रुक जाता है। इसके बाद यह प्रारंभिक स्थिति में वापस आ जाता है और 75 मिमी तक पीछे की ओर चलता है।
वीडियो फाइल - मॉडलछात्रों के लिए मॉडल कि कैसे एक डिवाइस पर VEXcode GO लॉन्च करें और अपने प्रोजेक्ट का नाम बदलकर Reverse करें। विद्यार्थियों को इस परियोजना को अपनी पहली परियोजना से अलग सहेजने के लिए 'इस रूप में सहेजें' का चयन करने के लिए कहें।
अधिक जानकारी के लिए प्रोजेक्ट खोलें और सहेजेंआलेख में दिए गए चरणों का संदर्भ लें।
-
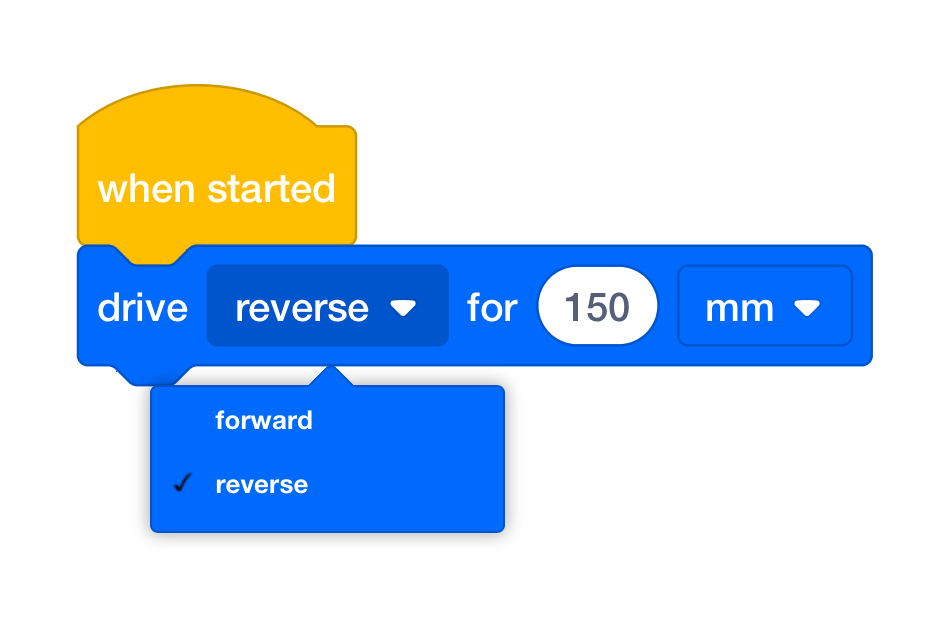
कोड बेस ड्राइव को रिवर्स में रखने के लिए [ड्राइव फॉर] ब्लॉक पर पैरामीटर को कैसे बदला जाए, इसका मॉडल बनाएं।
पैरामीटर बदलें (रिवर्स) - Play भाग 1 में बताई गई समान अनुमान प्रक्रिया का उपयोग करें। छात्रों को कोड बेस को प्रारंभिक स्थिति में रखने को कहें, फिर अनुमान लगाएं कि रोबोट कितनी दूर तक जाएगा। उन्हें वहां एक मार्कर लगाना चाहिए जहां उनके अनुसार कोड बेस रुक जाएगा।
-
छात्रों को अपनी परियोजनाएं शुरू करने को कहें। यदि कनेक्शन संबंधी समस्याएँ हों तो आपको उन्हें VEX GO Brainकरने के चरणों की याद दिलाने की आवश्यकता हो सकती है।
रिवर्स 150 मिमी - एक बार जब छात्र रिवर्स में ड्राइविंग के व्यवहार को देख लें, तो छात्रों को अपने प्रोजेक्ट पर वापस जाने का मॉडल दिखाएं। इसके बाद उन्हें अपने प्रोजेक्ट का नाम बदलकरफॉरवर्ड और रिवर्सरखना चाहिए। अधिक जानकारी के लिए खोलें और सहेजेंVEX लाइब्रेरी लेख में दिए गए चरणों का संदर्भ लें।
-
छात्रों के लिए मॉडल कि कैसे दूसरा [ड्राइव फॉर] ब्लॉक जोड़ा जाए। एक [ड्राइव फॉर] ब्लॉक में रोबोट को आगे की ओर चलाना चाहिए, और दूसरे में रोबोट को पीछे की ओर चलाना चाहिए। [ड्राइव फॉर] ब्लॉक के मापदंडों को संपादित करने का मॉडल बनाएं, और फिर परियोजना को फिर से शुरू करके देखें कि मापदंडों में परिवर्तन ने कोड बेस रोबोट की गति को कैसे प्रभावित किया।
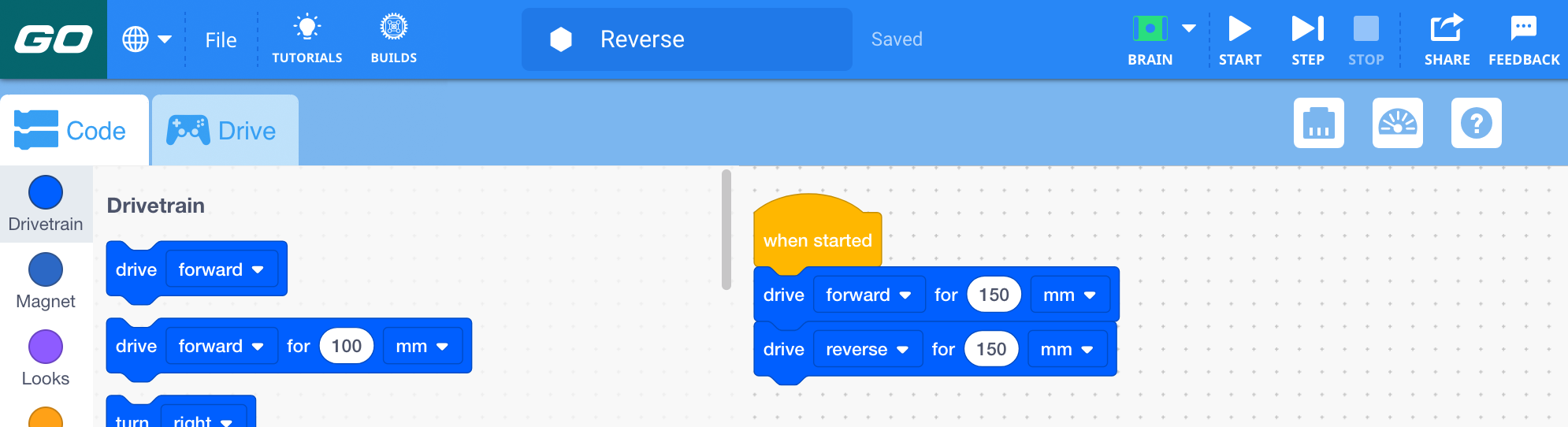
आगे और पीछे
-
- सुविधा प्रदान करनाजब छात्र अपनी परियोजनाओं का संपादन कर रहे हों और रोबोट के व्यवहार का अवलोकन कर रहे हों, तो निम्नलिखित प्रश्न पूछकर चर्चा को सुविधाजनक बनाएं:
- क्या आप मुझे अपने हाथों का उपयोग करके दिखा सकते हैं कि परियोजना शुरू करने से पहले आपने सोचा था कि कोड बेस रोबोट कितनी दूर तक चलेगा?
- आपने दूरी पैरामीटर को क्या बदला और क्यों? अब जब दूरी बदल दी गई है तो आपको क्या लगता है कि कोड बेस रोबोट कितनी दूर तक यात्रा करेगा?
- जब आपने एक और [ड्राइव फॉर] ब्लॉक जोड़ा, तो क्या आपने उन्हें समान दूरी तय करने के लिए सेट किया था? क्या उनका एक जैसा होना जरूरी है? क्यों या क्यों नहीं?
- यदि मेरे कोड बेस रोबोट को 100 मिमी आगे चलने के लिए कोडित किया गया है, तो यदि मैं इसे दोगुनी दूरी तक ले जाना चाहता हूँ तो मुझे दूरी को कितनी दूरी तक बदलना होगा?
कोड बेस रोबोट की गतिविधि पर चर्चा करें - याद दिलाएंयाद दिलाएं कि जब छात्र अपना प्रोजेक्ट संपादित कर रहे हों या शुरू कर रहे हों तो उनके मन में प्रश्न आ सकते हैं। विद्यार्थियों को याद दिलाएं कि नई अवधारणाओं को सीखने में कई प्रयास करने पड़ सकते हैं और यदि वे परियोजना में ब्लॉक जोड़ने और संपादित करने में असफल रहते हैं तो उन्हें पुनः प्रयास करने के लिए प्रोत्साहित करें।
- पूछेंविद्यार्थियों से यह सोचने के लिए कहें कि यदि वे चाहते हैं कि कोड बेस रोबोट दरवाजे तक जाए और फिर वापस वहीं आ जाए जहां से वह शुरू हुआ था, तो उसे किस प्रकार चलना होगा। कोड बेस रोबोट अब किस प्रकार के कार्य या नौकरियां कर सकता है जिन्हें वह आगे और पीछे ले जा सकता है? विद्यार्थियों से ऐसा कार्य सुझाने को कहें जिसे कोड बेस रोबोट अब आगे और पीछे की गति का उपयोग करके पूरा कर सके।
वैकल्पिक: अनुभव के इस बिंदु पर यदि आवश्यक हो तो समूह अपने कोड बेस रोबोट को विघटित कर सकते हैं। वे आगामी प्रयोगशालाओं में भी इसी निर्माण का उपयोग करेंगे, इसलिए यह एक शिक्षक विकल्प है।