
Bermain
Bagian 1 - Langkah demi Langkah
- InstruksikanInstruksikan siswa bahwa mereka akan mengeksplorasi cara menggerakkan robot Basis Kode mereka maju! Sebelum memulai proyek, mereka akan memprediksi di mana robot Basis Kode akan berakhir. Tonton animasi di bawah untuk melihat contoh Basis Kode yang bergerak maju untuk jarak yang berbeda. Dalam animasi, Basis Kode dimulai di sudut kiri bawah Ubin dan pertama-tama bergerak maju sejauh 150 mm dan berhenti. Kemudian muncul kembali di lokasi awal, dan melaju maju 75mm dan berhenti.
Berkas video
- ModelModelkan cara meluncurkan VEXcode GO pada perangkat dan buat proyek yang memajukan Basis Kode dengan blok [Drive for].
- Model bagi siswa langkah-langkah Buka dan Simpan Proyekartikel Pustaka VEX dan minta mereka mengikuti langkah-langkah untuk membuka dan menyimpan proyek mereka.
- Instruksikan siswa untuk memberi nama proyek mereka Maju.
- Mintalah siswa menghubungkan Brain dari robot Basis Kode mereka ke perangkat mereka.
- Setelah siswa memberi nama proyek mereka dan menghubungkan Brain ke perangkat mereka, mereka perlu mengikuti langkah-langkah untuk mengonfigurasi robot Basis Kode. Modelkan langkah-langkah dari artikel Konfigurasi Basis Kode Pustaka VEX dan pastikan siswa dapat melihat blok Drivetrain di Kotak Alat.
-
Tunjukkan cara menyeret blok [Drive for] ke dalam Ruang Kerja dan meletakkannya di bawah blok {When started}.
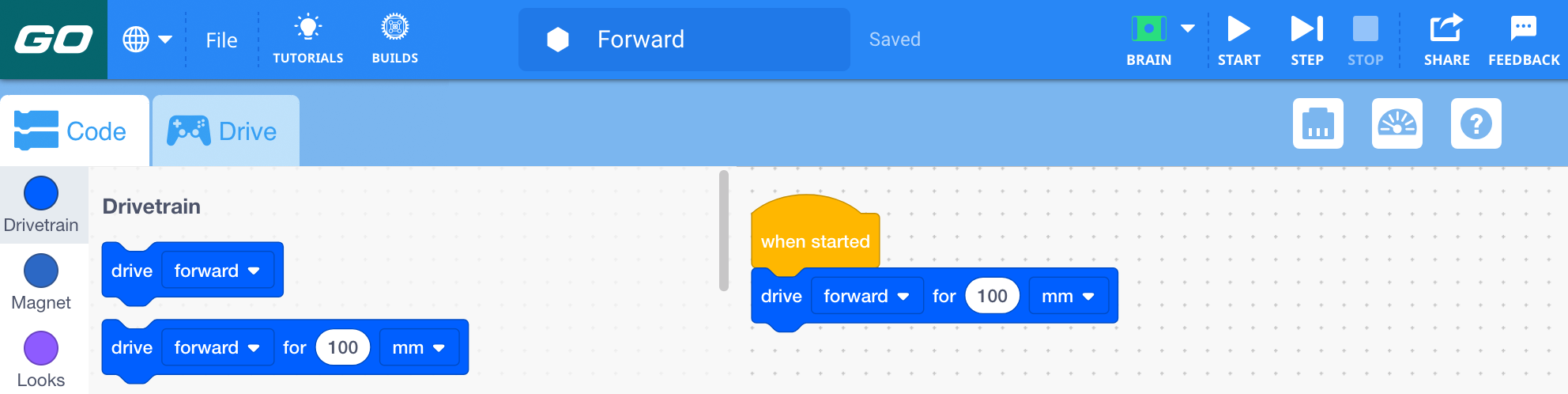
Tambahkan blok [Drive for] -
Ubah parameter blok [Drive for] menjadi 150mm.
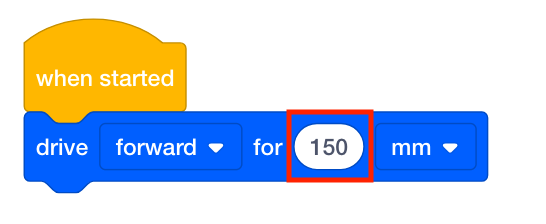
Ubah parameter - Model bagi siswa cara memprediksi seberapa jauh robot Basis Kode akan bergerak berdasarkan parameter di blok [Berkendara untuk]. Mintalah siswa meletakkan Basis Kode di posisi awal, lalu perkirakan seberapa jauh robot akan bergerak. Mereka mesti menempatkan penanda di tempat yang mereka pikir Basis Kode akan berhenti.
-
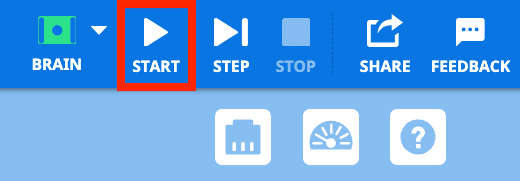
Model bagi siswa cara memilih tombol 'Mulai' di Toolbar untuk memulai proyek.
- Setelah siswa mengamati perilakunya, berikan model kepada siswa cara kembali ke proyek mereka, edit parameter blok [Drive for] dari 150 mm ke jarak lain, seperti 200 mm atau 250 mm. Kemudian, mulai proyek lagi untuk melihat bagaimana perubahan parameter memengaruhi pergerakan robot Basis Kode.
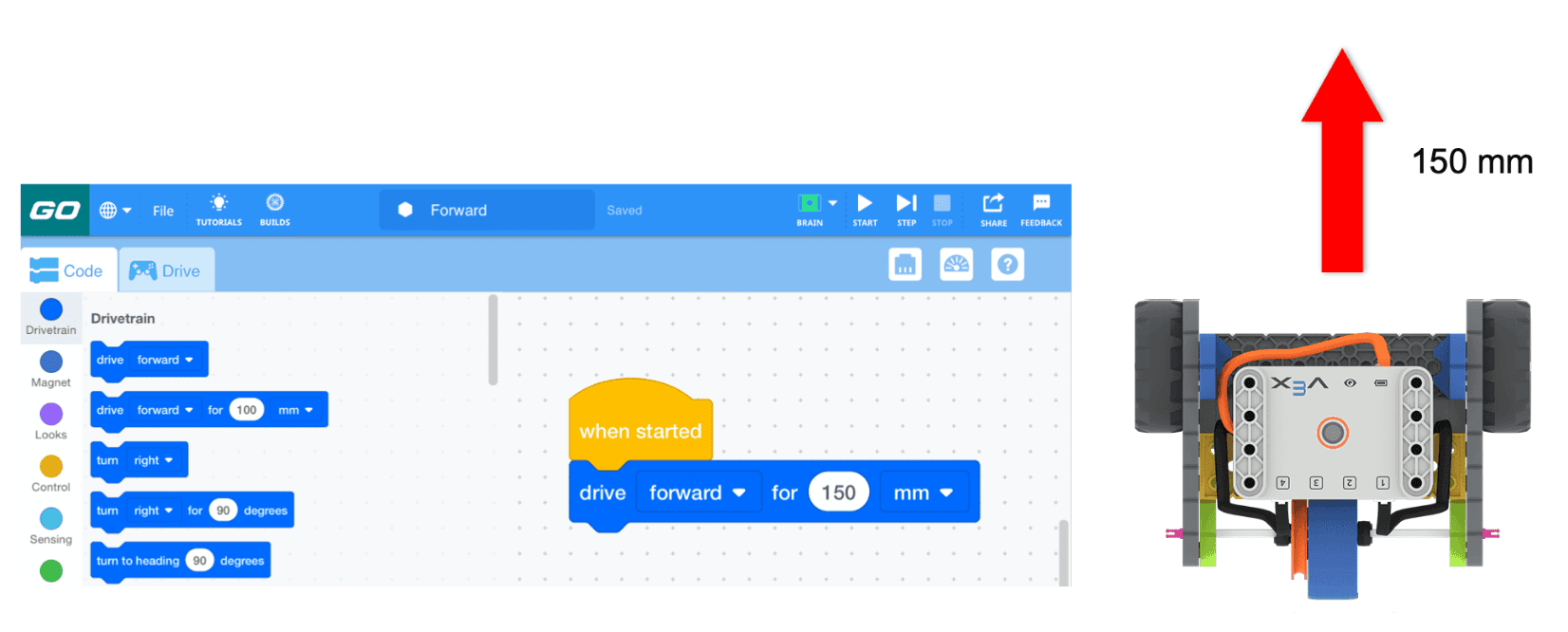
Maju 150 mm - MemfasilitasiFasilitasi diskusi seputar pengamatan siswa dan tujuan proyek dengan menanyakan hal berikut:
- Dapatkah Anda menunjukkan kepada saya menggunakan tangan Anda seberapa jauh menurut Anda robot Basis Kode akan bergerak sebelum Anda memulai proyeknya?
- Anda mengubah parameter jarak menjadi apa dan mengapa? Menurut Anda, seberapa jauh robot Basis Kode akan bergerak sekarang setelah jaraknya diubah?
- Berapa jarak yang ditempuh dibandingkan dengan perkiraan Anda?
- Kategori blok apa yang Anda gunakan untuk proyek ini?

Diskusikan Pergerakan Robot Basis Kode - IngatkanIngatkan siswa bahwa mereka mungkin mempunyai pertanyaan saat membuat dan memulai proyek mereka. Ingatkan siswa bahwa mempelajari konsep baru mungkin memerlukan beberapa kali percobaan dan dorong mereka untuk mencoba lagi jika tidak berhasil pada percobaan pertama.
- TanyakanMinta siswa untuk memikirkan seberapa jauh robot Basis Kode perlu bergerak untuk melintasi kelas. Mintalah siswa membuat hubungan mengapa jenis perencanaan ini berguna dalam kehidupan sehari-hari. Tanyakan kepada siswa bagaimana kemampuan merencanakan dan memberikan arahan yang akurat dapat berguna untuk suatu pekerjaan? Tanyakan kepada siswa apakah mereka dapat memikirkan pekerjaan apa saja yang memerlukan arahan?
Istirahat Tengah Bermain & Diskusi Kelompok
Segera setelah setiap kelompok menyelesaikan proyek mereka, berkumpullah untuk percakapan singkat.
- Apakah robot Basis Kode berakhir di tempat yang Anda harapkan? Jika tidak, seberapa dekat dengan prediksi Anda?
- Bagaimana Anda mengedit proyek Anda? Jarak baru apa yang Anda pilih?
- Apakah Anda mengalami kesulitan saat mengubah jarak di blok [Drive for]?
Perkenalkan Drivetrain:
- Sekarang setelah kita menjelajahi cara menggunakan VEXcode GO untuk memungkinkan robot Basis Kode kita melaju ke depan, menurut Anda mengapa ada bagian "Drivetrain" pada blok?
- Menurut Anda apa itu drivetrain? Bisakah Anda menjelaskan pemikiran Anda?
- Dapatkah Anda menunjukkan kepada saya menggunakan gerakan di mana menurut Anda letak drivetrain pada robot Code Base?
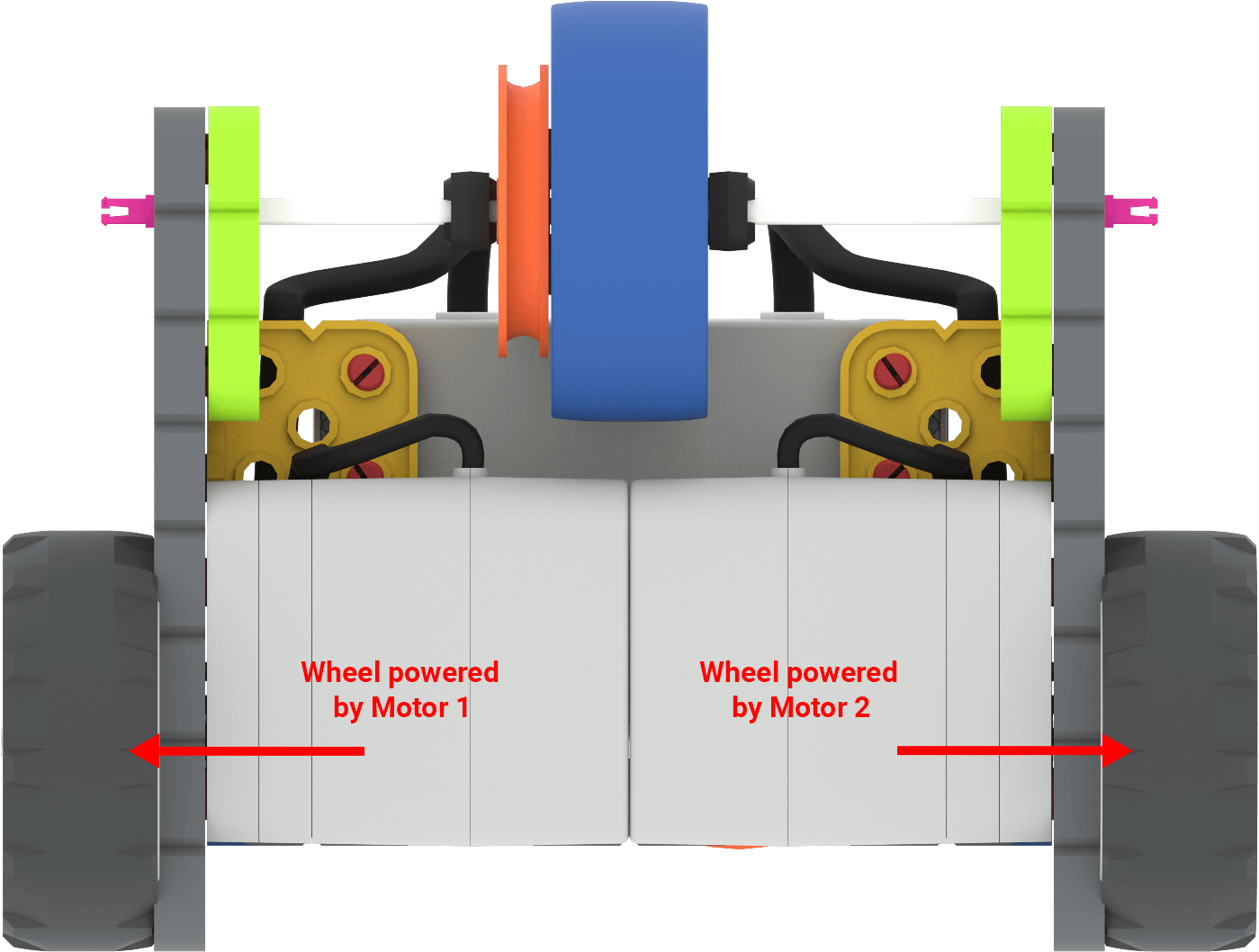
- Dapatkah Anda melihat bagian bawah robot Basis Kode Anda dan mengidentifikasi di mana motor berada di drivetrain ini, dan pada roda mana mereka dipasang?
Bagian 2 - Langkah demi Langkah
- InstruksikanInstruksikan siswa bahwa mereka akan menjelajahi cara menggerakkan robot Basis Kode mereka maju dan mundur!
Untuk memulai, setiap kelompok harus memiliki perangkat, VEXcode GO, setidaknya satu penanda penempatan, dan Basis Kode yang dibangun. Tonton animasi di bawah untuk melihat bagaimana Basis Kode bergerak secara terbalik. Dalam animasi, Basis Kode dimulai di sudut kiri atas petak, dan melaju mundur 150 mm, lalu berhenti. Kemudian kembali ke posisi awal dan bergerak mundur sejauh 75 mm.
Berkas video - ModelModel bagi siswa cara meluncurkan VEXcode GO pada perangkat dan mengganti nama proyek mereka menjadi Reverse. Tunjukkan kepada siswa untuk memilih 'Simpan Sebagai' untuk menyimpan proyek ini secara terpisah dari proyek pertama mereka.
Lihat langkah-langkah dalam artikel Buka dan Simpan Proyekuntuk informasi lebih lanjut.
-
Modelkan cara mengubah parameter pada blok [Drive for] agar Basis Kode bergerak mundur.
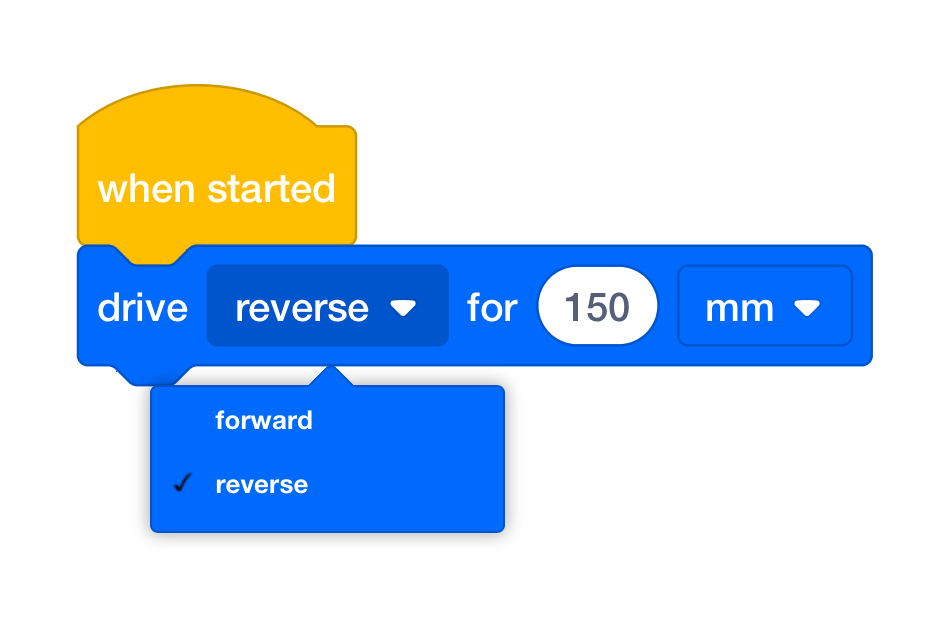
Ubah parameter (terbalik) - Gunakan proses estimasi yang sama seperti pada Bagian 1. Mintalah siswa meletakkan Basis Kode di posisi awal, lalu perkirakan seberapa jauh robot akan bergerak. Mereka mesti menempatkan penanda di tempat yang mereka pikir Basis Kode akan berhenti.
-
Mintalah siswa memulai proyek mereka. Anda mungkin perlu mengingatkan mereka tentang langkah-langkah Menghubungkan VEX GO Brainjika terjadi masalah koneksi.
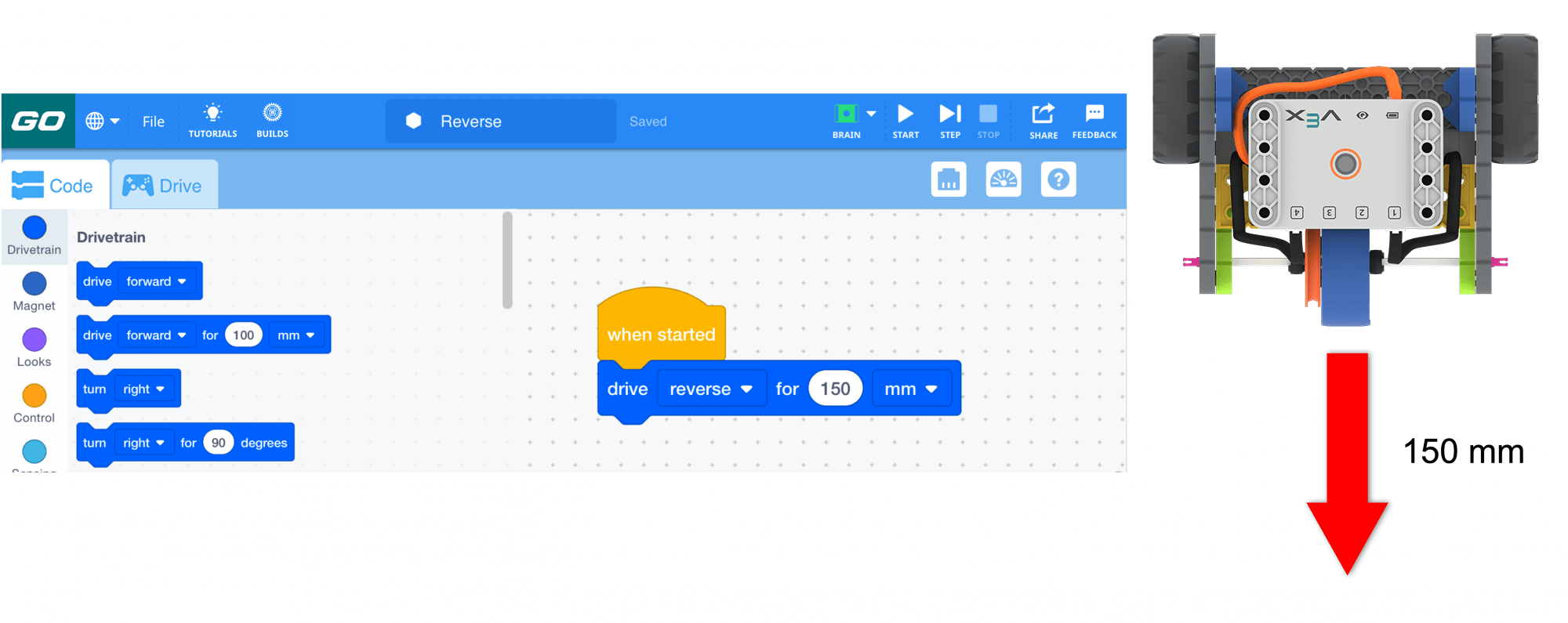
Mundur 150mm - Setelah siswa mengamati perilaku saat berkendara mundur, berikan contoh kepada siswa cara kembali mengerjakan proyek mereka. Mereka kemudian harus mengganti nama proyek merekaMaju dan Mundur. Lihat langkah-langkah dalam artikel Buka dan SimpanPustaka VEX untuk informasi lebih lanjut.
-
Model bagi siswa cara menambahkan blok [Drive for] kedua. Satu blok [Drive for] harus membuat robot bergerak maju, dan blok kedua harus membuat robot bergerak mundur. Modelkan cara mengedit parameter blok [Drive for], lalu mulai proyek lagi untuk melihat bagaimana perubahan parameter memengaruhi pergerakan robot Basis Kode.
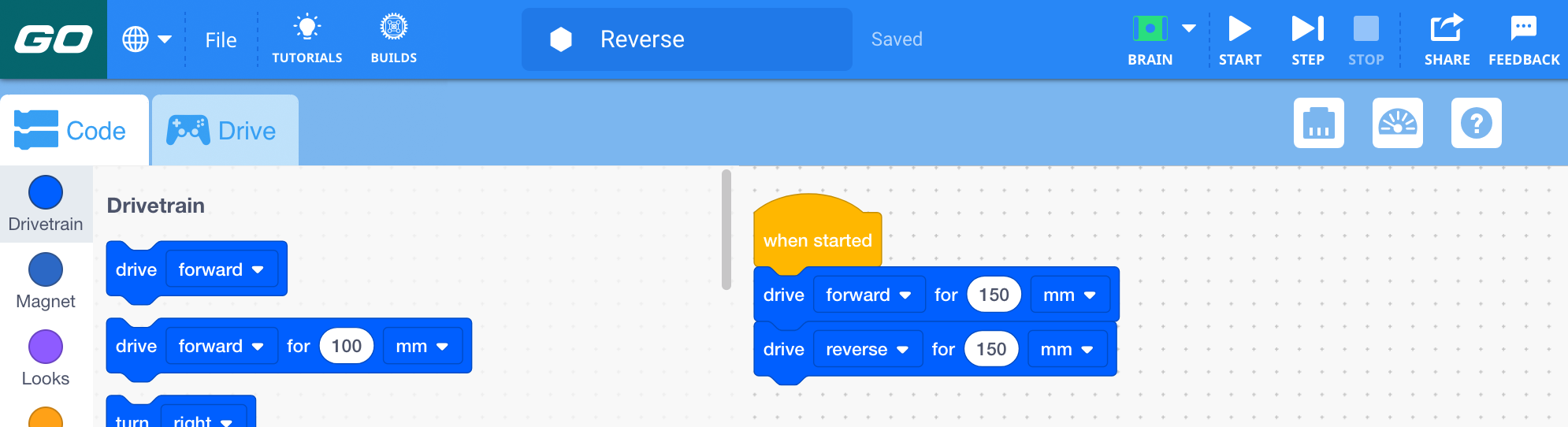
Maju dan Mundur
-
- MemfasilitasiFasilitasi diskusi saat siswa mengedit proyek mereka dan mengamati perilaku robot dengan menanyakan hal berikut:
- Dapatkah Anda menunjukkan kepada saya menggunakan tangan Anda seberapa jauh menurut Anda robot Basis Kode akan bergerak sebelum Anda menjalankan proyeknya?
- Anda mengubah parameter jarak menjadi apa dan mengapa? Menurut Anda, seberapa jauh robot Basis Kode akan bergerak sekarang setelah jaraknya diubah?
- Saat Anda menambahkan blok [Drive for] lainnya, apakah Anda mengaturnya agar menempuh jarak yang sama? Apakah harus sama? Mengapa atau mengapa tidak?
- Jika robot Basis Kode saya dikodekan untuk melaju ke depan sejauh 100 mm, seberapa jauh saya perlu mengubah jarak jika saya ingin robot tersebut melaju dua kali lebih jauh?
Diskusikan Pergerakan Robot Basis Kode - IngatkanIngatkan siswa mungkin mempunyai pertanyaan saat mereka mengedit dan memulai proyek mereka. Ingatkan siswa bahwa mempelajari konsep baru mungkin memerlukan beberapa kali percobaan dan dorong mereka untuk mencoba lagi jika mereka tidak berhasil menambahkan dan mengedit blok dalam proyek.
- TanyakanMinta siswa untuk memikirkan tentang bagaimana robot Basis Kode perlu bergerak, apakah mereka ingin robot itu melaju ke pintu masuk, lalu kembali ke tempat dimulainya. Jenis tugas atau pekerjaan apa yang kini dapat dilakukan robot Basis Kode sehingga dapat bergerak maju dan mundur? Minta siswa untuk menyarankan tugas yang sekarang dapat diselesaikan oleh robot Basis Kode dengan menggunakan gerakan maju dan mundur.
Opsional: Kelompok dapat mendekonstruksi robot Basis Kode mereka jika diperlukan pada tahap pengalaman ini. Mereka akan menggunakan build yang sama di lab berikutnya, jadi ini adalah pilihan guru.