
Bermain
Bagian 1 - Langkah demi Langkah
- InstruksikanInstruksikan siswa bahwa mereka akan menjelajahi cara menghubungkan robot Basis Kode mereka secara nirkabel ke perangkat mereka. Untuk memulai, setiap kelompok harus memiliki perangkat, perangkat lunak VEXcode GO, dan robot Basis Kode yang sudah dibangun.
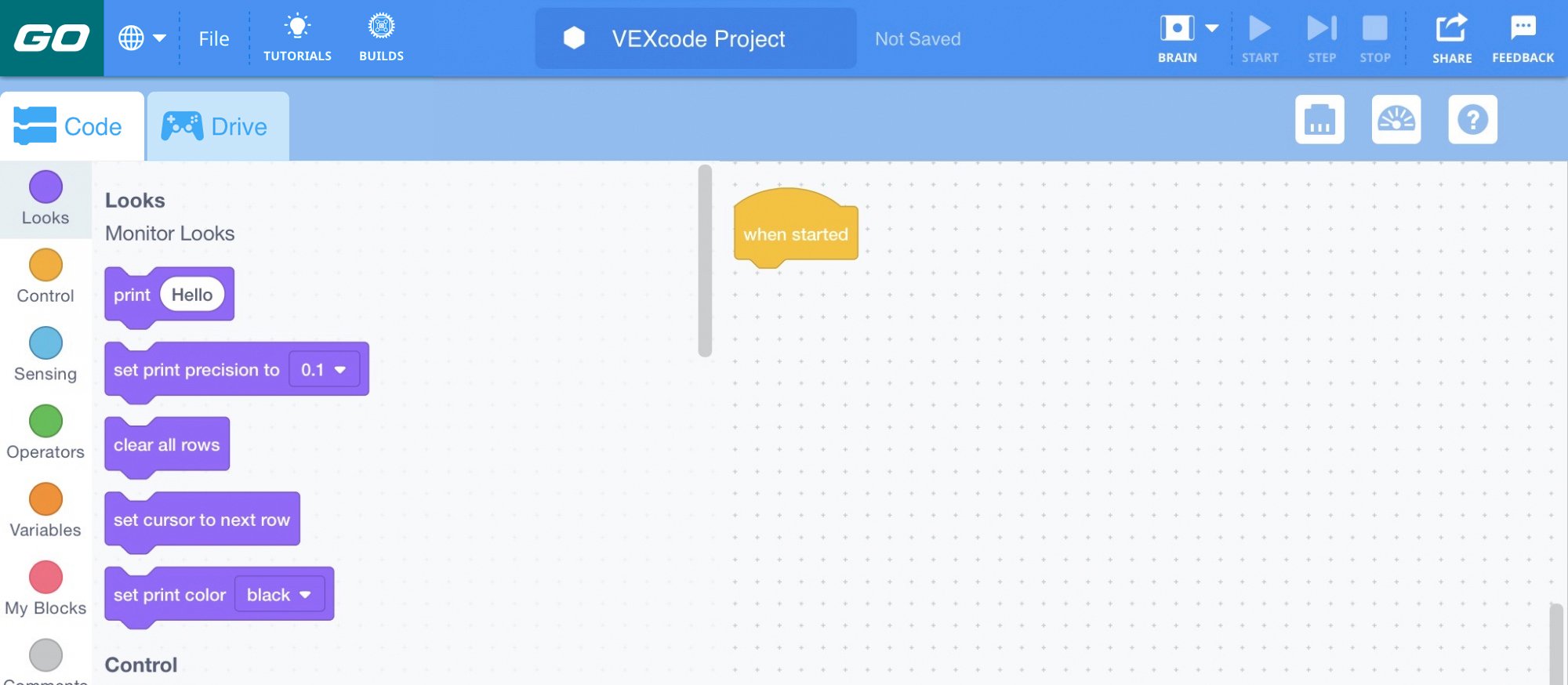
VEXcode GO - ModelModel cara meluncurkan VEXcode GO pada perangkat dan langkah-langkah untuk menghubungkan perangkat ke robot Basis Kode.
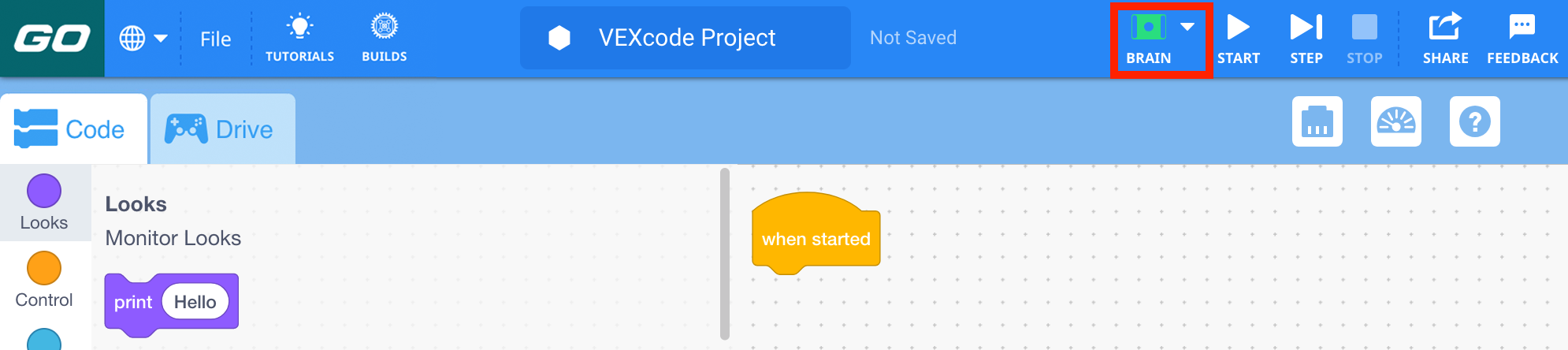
Ikuti langkah-langkah dalam artikel Hubungkan VEX GO Brain VEX Library agar perangkat Anda dapat terhubung ke robot Basis Kode Anda. Model bagi siswa cara memeriksa untuk memastikan bahwa robot Basis Kode mereka telah berhasil terhubung, dengan melihat ikon Otak berwarna di bilah alat.
Catatan: Saat pertama kali menghubungkan Basis Kode ke perangkat Anda, Gyro yang terpasang di Otak dapat melakukan kalibrasi, yang menyebabkan Basis Kode bergerak sendiri selama beberapa saat. Ini adalah perilaku yang diharapkan, jangan sentuh Basis Kode saat sedang dikalibrasi.
Hubungkan Otak GO - MemfasilitasiFasilitasi diskusi saat siswa menghubungkan perangkat mereka ke VEXcode GO dengan menanyakan hal berikut:
- Bagaimana Anda tahu jika perangkat Anda terhubung dengan sukses?
- Di mana ikon Otak di Toolbar?
- Apa langkah pertama untuk menghubungkan perangkat Anda secara nirkabel?
Hubungkan ke Basis Kode
- IngatkanIngatkan siswa bahwa mempelajari konsep baru mungkin memerlukan beberapa kali percobaan dan dorong mereka untuk mencoba lagi jika mereka tidak berhasil menghubungkan perangkat mereka pada percobaan pertama.
- TanyakanMinta siswa untuk berpikir tentang bagaimana robot dapat digunakan untuk menyelesaikan pekerjaan dalam kehidupan nyata yang kotor, membosankan, atau berbahaya. Mengapa lebih baik jika robot melakukan pekerjaan ini daripada manusia? Dapatkah Anda memikirkan pekerjaan di mana robot melakukan semua pekerjaan? Bagaimana dengan pekerjaan di mana manusia dan robot bekerja bersama?
Istirahat Tengah Bermain & Diskusi Kelompok
Segera setelah setiap kelompok berhasil menghubungkan robot Basis Kode mereka ke perangkat, berkumpul untuk percakapan singkat.
- Apa langkah pertama dalam menghubungkan robot Code Base ke perangkat Anda secara nirkabel?
- Bagaimana saya mengetahui apakah koneksi nirkabel saya berhasil?
- Jika Anda harus menjelaskan kepada seorang teman menggunakan kata-kata dan gerakan cara menghubungkan robot Basis Kode ke suatu perangkat, apa yang akan Anda katakan?
- Apakah Anda mengalami kesulitan saat menghubungkan? Jika ya, bagaimana Anda mengatasinya?
Bagian 2 - Langkah demi Langkah
- InstruksikanInstruksikan siswa bahwa mereka sekarang akan menjelajahi cara menggerakkan robot Basis Kode! Untuk memulai, setiap kelompok harus memiliki perangkat, perangkat lunak VEXcode GO, dan robot Basis Kode yang sudah dibangun.
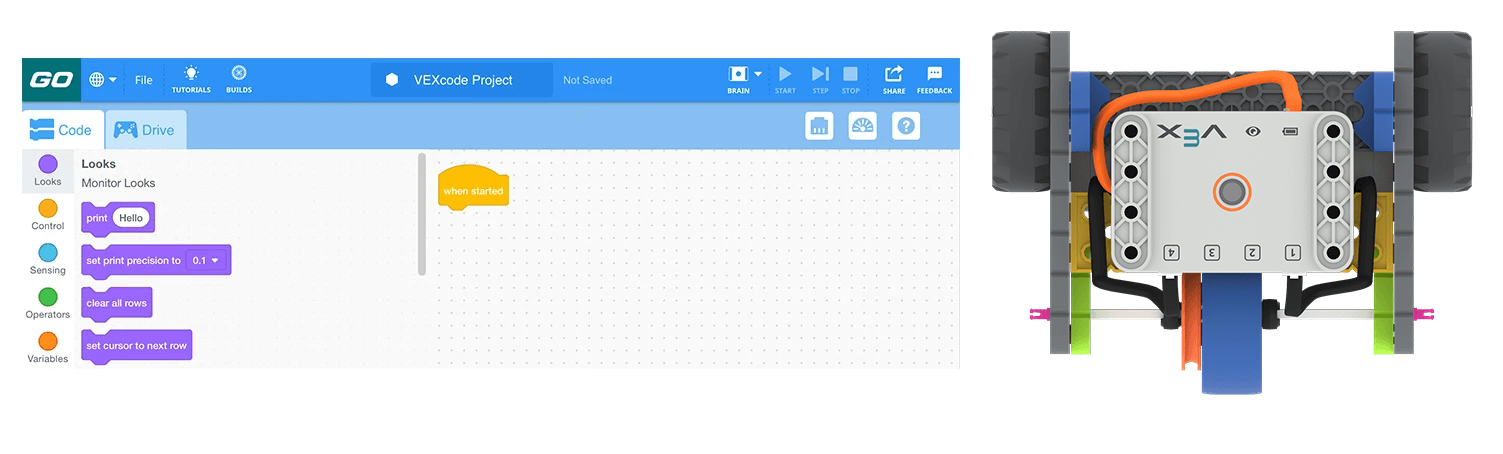
Menggunakan VEXcode GO dengan Basis Kode - ModelModel bagi siswa cara membuka dan menyimpan proyek mereka, dan mengonfigurasi Basis Kode di VEXcode GO.
Modelkan langkah-langkah artikel Buka dan Simpan ProyekPustaka VEX untuk perangkat Anda, dan minta mereka mengikuti langkah-langkah untuk membuka dan menyimpan proyek mereka. Instruksikan siswa untuk memberi nama proyek merekaDrive.

Beri nama proyek Drive Setelah siswa memberi nama proyek mereka, mereka perlu mengikuti langkah-langkah untuk mengonfigurasi Basis Kode. Modelkan langkah-langkah dari artikel Konfigurasi Basis KodePustaka VEX dan pastikan siswa dapat melihat blok Drivetrain di Kotak Alat.
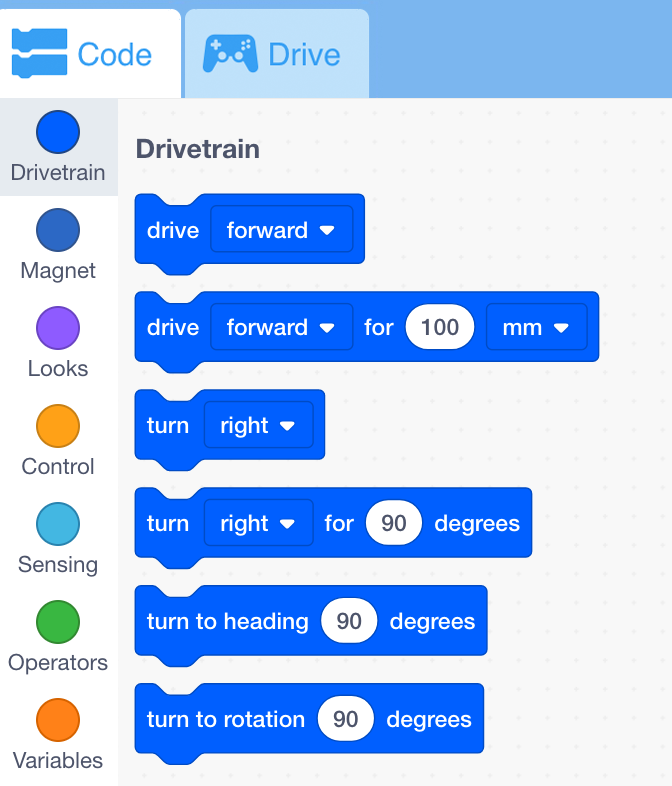
Tunjukkan cara menyeret blok [Drive for] ke dalam Ruang Kerja dan meletakkannya di bawah blok {When started}.
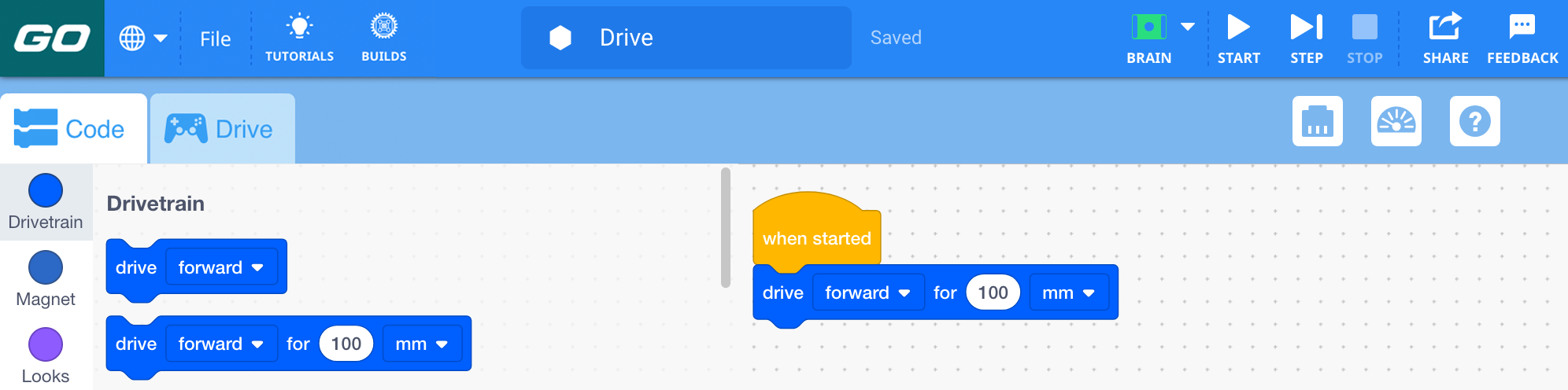
Tambahkan blok [Drive for] Model bagi siswa bagaimana memulai proyekuntuk mengujinya.
- MemfasilitasiFasilitasi diskusi saat siswa membuat dan memulai proyek mereka dengan menanyakan hal berikut:
- Di mana saya dapat menemukan blok [Drive for] di VEXcode GO?
- Bagaimana cara menambahkan blok ke proyek saya?
- Sebelum memulai proyek Anda, apa yang Anda harapkan dilakukan Basis Kode?
- Apakah Anda menghadapi tantangan saat membuat dan memulai proyek Anda? Jika ya, bagaimana Anda mengatasinya?

Diskusi menggunakan VEXcode GO - IngatkanIngatkan siswa bahwa mempelajari konsep baru mungkin memerlukan beberapa kali percobaan dan dorong mereka untuk mencoba lagi jika mereka tidak berhasil menggerakkan robot Basis Kode mereka pada percobaan pertama.
- TanyaMinta siswa untuk memikirkan pekerjaan atau tugas apa yang dapat diselesaikan robot Basis Kode dengan melaju ke depan. Bisakah alat itu mengantarkan obat ke pasien di rumah sakit? Bisakah mengantarkan paket? Mungkin berkendara ke suatu tempat yang terlalu berbahaya atau kecil bagi manusia? Minta siswa untuk membuat setidaknya dua skenario atau pekerjaan di mana mereka dapat menggunakan robot Basis Kode untuk menyelesaikan tugas.
Opsional: Jika memungkinkan, pertahankan Basis Kode yang telah disusun untuk Lab lain dalam Unit ini.