
- 8~15歳 歳
- 30分~1時間40分
- 初心者
説明
-
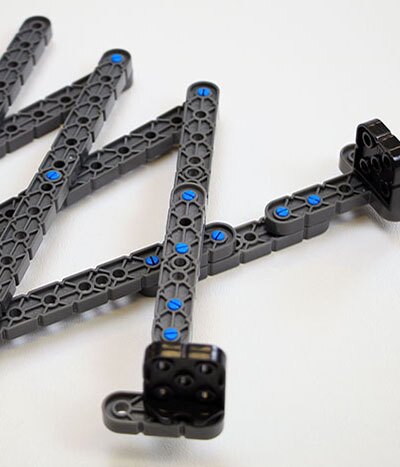
学生は、シザー リンケージを使用して動きの方向を変換する装置を構築し、シザー リンケージの仕組みを調べます。
主要な概念
-
リンケージ
-
力
-
モーション
-
シザーリフト
目的
-
シザーリンクを使用してサイズを変更できるビルドを作成します。
-
このビルドを使用してオブジェクトの動きを識別します。
-
リフトなどの専門的なアプリケーション内のシザー リンクを特定し、動きを変換する機能について説明します。
-
グラバーのシザー リンクを強化するためのテクニック (二重化、クロスリンク、ピボット ポイントの再配置) を適用します。
必要な材料
-
VEX IQ スーパーキット
-
エンジニアリングノート
ファシリテーションノート
-
この STEM ラボを開始する前に、ビルドに必要なすべてのパーツが利用可能であることを確認してください。
-
このビルドの一部のパーツを使用して構築するのは難しい場合があります。 必要に応じて、付録のヒントを参照してください。
-
グラバーの伸縮時にユーザーが挟まれる危険があります。 Grabber を扱う人は、ピンチポイントに注意する必要があります。
-
エンジニアリング ノートは、フォルダーまたはバインダーの中に罫線が入った紙と同じくらい単純なものにすることができます。 示されているノートブックは、VEX Robotics を通じて入手できる、より洗練された例です。
-
STEM ラボの各セクションのおおよそのペースは次のとおりです: 探索 - 25 分、再生 - 30 分、適用 - 10 分、再考 - 30 分、および知識 - 5 分。
教育基準
共通コア州標準 (CCSS)
-
RST.6-8.1
-
RST.6-8.3
次世代科学スタンダード (NGSS)
-
MS-ETS1-3