
![]() 教師のヒント
教師のヒント
学生は、プログラムの作成、名前変更、保存で問題が発生した場合にチュートリアルを参照できます。 歩き回って生徒を監視し、生徒がすべての手順を完了していることを確認します。

プログラマは次の手順を完了する必要があります。
-
ファイル メニューを開きます。
-
開く 例を選択します。
-
オートパイロット(ドライブトレイン)テンプレートを選択して開きます。
-
プロジェクトに Turn Remix Boxという名前を付けます。
-
プロジェクト保存し 。
さあ、動きましょう!
アクティビティ A: 箱の周りをドライブしましょう!
このアクティビティの目標は、ボックスの周囲を走行するようにオートパイロットをプログラムすることです。 このタスクには複数の手順が必要なので、ロボットのように考えることを忘れないでください。
このプロジェクトを作成するには、[Turn for] ブロックと [Drive for] ブロックの 2 つのブロックを使用する必要があります。
チームを導くためのいくつかの手順を次に示します。
-
ビルダー、ボックスとオートパイロットを床の上に並べて配置し、オートパイロットが移動できるスペースを確保します。 定規を使用して、オートパイロットが移動する必要がある距離をインチ単位で測定します。
-
ヒント: オートパイロットが旋回できるスペースを確保するために、ボックスの正確な側面よりも遠くまで測定するようにしてください。
-
-
レコーダー、ボックスの図を描き、ビルダーがボックスの各側面に指定した寸法をリストします。 測定値が正しいことをチームに確認してください。
-
ドライバー、ボックスを回避するためにオートパイロットが実行する必要がある手順をリストします。 ドライブとターンステップも付属!
-
レコーダー、ドライバーがリストした手順をエンジニアリング ノートブックに書き込みます。
-
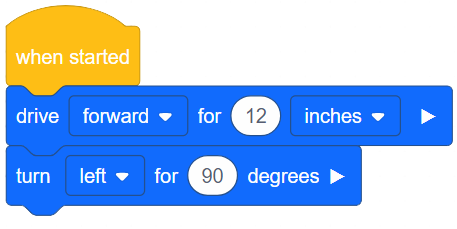
プログラマーは、エンジニアリング ノートブックの図と手順を使用して、新しいプロジェクトをプログラムします。 正しい順序で、 ブロックに 回転、 ブロックに ドライブを追加します。 次に、 ドライブの ブロックに含まれる距離を、エンジニアリング ノートブックに記録されている距離に変更します。
-
ヒント: 回転 ブロックが正しい方向に回転するように設定されていることを確認してください。
-
プロジェクトは次のようになります。
-
-
プログラマー、 完了したらプロジェクトをダウンロード します。
-
ドライバー、 Autopilot でプロジェクトを実行します 。
おめでとう! 単純な動作を使用して、より複雑なタスクをプログラムしました。
さて、オートパイロットは期待通りにボックス内を動きましたか? そうでない場合、なぜそうなると思いますか? どのような変化を起こすことができると思いますか?
![]() 教師ツールボックス
-
立ち止まって話し合う
教師ツールボックス
-
立ち止まって話し合う
アクティビティ A 中に生徒が直面した課題について立ち止まって話し合います。ディスカッションに推奨されるプロンプトについては、ここ (Google ) をクリックしてください。
![]() 議論を促す
-
境界
議論を促す
-
境界
質問: 箱の周囲の長さはどれくらいでしたか? 物体の周囲は、すべての辺の長さを合計することによって計算されます。
A: 生徒は箱の大きさに基づいて答えます。
質問: オートパイロットがボックスの周りを回ったルートの周囲の長さはどれくらいでしたか?
回答: 生徒はプログラムに使用した測定値に基づいて回答します。
質問: なぜこれら 2 つの周囲長が異なるのですか?
回答: オートパイロットが方向転換するには、ボックスの各側面を通過するための余分なスペースが必要になります。 したがって、オートパイロットはボックスの周囲よりも大きな周囲を作成します。