대체 코딩 방법
이 STEM Lab Unit은 Coder 및 Coder 카드와 함께 사용하도록 작성되었습니다. 그러나 이 장치의 랩을 조정하여 코딩 활동에 VEXcode 123 또는 터치 버튼을 사용할 수 있습니다. 이러한 유연성은 학생들의 개별적인 요구를 충족시키는 데 도움이 될 수 있다. 예를 들어, 학생들이 VEXcode 123에 익숙하다면 VEXcode 123으로 모든 코딩 활동을 완료할 수 있습니다. 각 랩의 요약 섹션에는 개별 랩을 수정하는 데 도움이 되는 추가 정보가 포함되어 있습니다.
VEXcode 123 적응
이 유닛과 함께 VEXcode 123을 사용하는 경우, 학생들은 다음 블록을 사용하여 코딩 활동에서 123 로봇을 구동할 수 있습니다. VEXcode 123으로 작업하는 방법에 대한 자세한 내용은 STEM 라이브러리의 VEXcode 123 섹션을 참조하십시오.
| VEXcode 123 블록 | 행동 |
|---|---|
 |
[Drive for] 블록은 123 로봇을 주어진 거리를 앞으로 또는 반대로 이동시킵니다. 123 로봇이 타원형에 값을 입력하여 얼마나 멀리 이동할지 설정합니다. |
 |
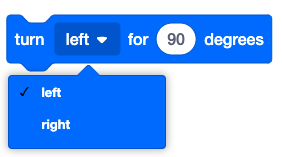
[Turn for] 블록은 지정된 각도만큼 123 로봇을 왼쪽이나 오른쪽으로 돌립니다. |
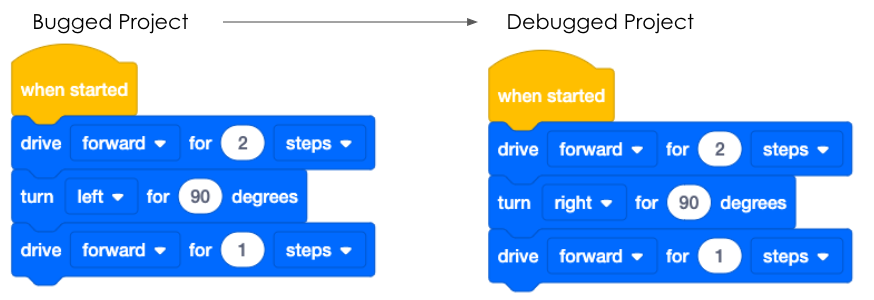
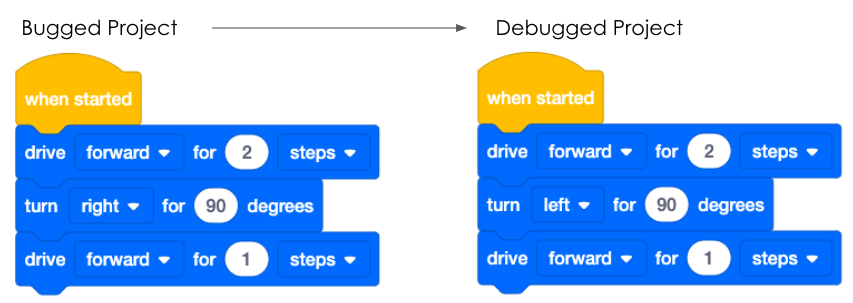
- 학생들은 VEXcode 123의 Drivetrain 블록을 사용하여 동일한 프로젝트를 구축할 수 있습니다. 프로젝트의 버그를 수정하려면 여기에 표시된 예제와 같이 블록의 매개 변수를 조정할 수 있습니다.
- 실습 1의 Play Part 1 프로젝트를 다시 생성하기 위해 VEXcode 123 프로젝트는 다음과 같이 구성될 수 있습니다.
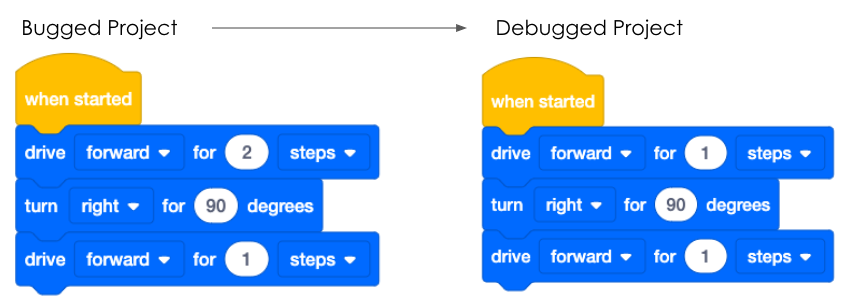
- 실험실 1의 플레이 파트 2와 실험실 2의 플레이 파트 1에 대한 프로젝트를 다시 만들려면 VEXcode 123 프로젝트는 다음과 같습니다.
- 실습 2에서 학생들은 디버깅 프로세스의 일부로 단계 기능을 사용하여 프로젝트에서 버그를 더 쉽게 찾을 수 있도록 도와줍니다. VEXcode 123에서 프로젝트를 진행하는 방법에 대한 자세한 내용은 이 STEM 라이브러리 문서를 참조하십시오. 실험실 2의 Play Part 2 프로젝트를 다시 생성하기 위해 VEXcode 123 프로젝트는 다음과 같을 수 있습니다.
터치 적응
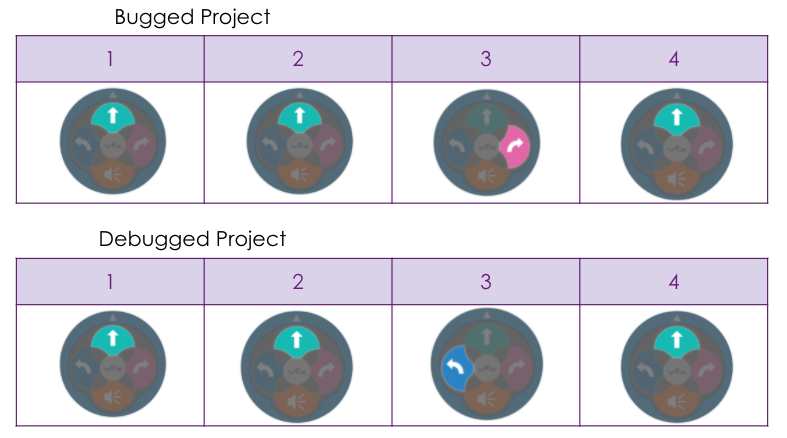
- 학생들은 123 로봇의 터치 버튼을 사용하여 이 유닛의 디버깅 활동을 완료할 수도 있습니다. Touch를 사용하는 경우 학생들에게 인쇄 가능한 터치 버튼이나 프로젝트 작성및 모션 계획 인쇄물과 같은 123개의 인쇄물을 제공하여 디버깅을 돕기 위해프로젝트를 시각적으로 표현할 수 있도록 하는 것이 유용할 수 있습니다.
- 123 로봇의 터치 버튼을 사용하여 코딩하는 방법에 대한 자세한 내용은 123 로봇 STEM 라이브러리 문서의 터치 버튼으로 코딩 을 참조하십시오.
- 터치 버튼을 사용하여 실험실 1의 Play Part 1 프로젝트를 다시 만들려면 순서가 다음과 같을 수 있습니다.
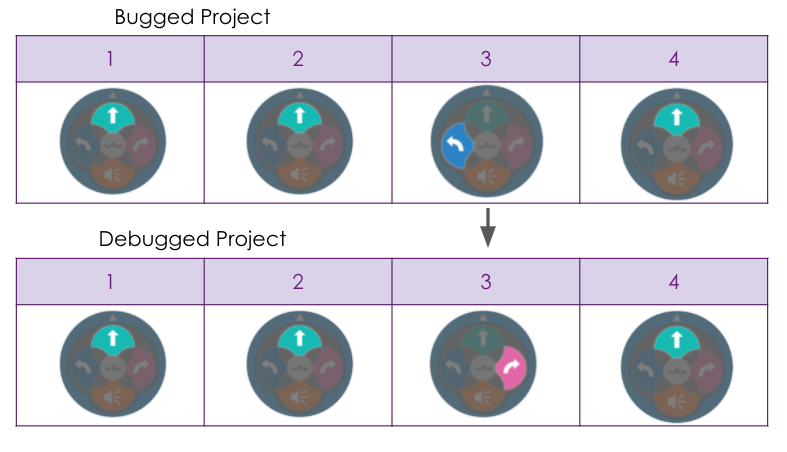
- 실험실 1의 플레이 파트 2와 터치 버튼을 사용하여 실험실 2의 플레이 파트 1에 대한 프로젝트를 다시 만들려면 순서가 다음과 같을 수 있습니다.
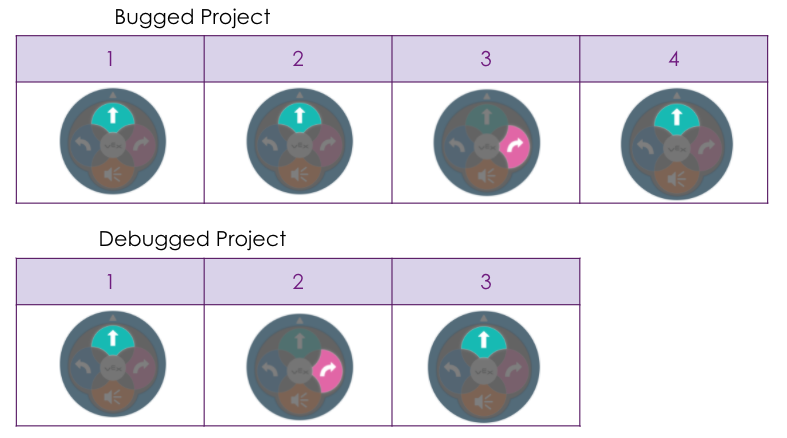
- 터치 버튼을 사용하여 실험실 2의 Play Part 2 프로젝트를 다시 만들려면 순서가 다음과 같을 수 있습니다.