
요약
필요한 재료
다음은 VEX 123 Lab을 완료하는 데 필요한 모든 자료 및 교육 리소스의 목록입니다. 먼저 123 로봇을 포함하여 실험실 전체에 필요한 재료가 나열됩니다. 특정 랩에서는 슬라이드쇼 형식의 교육 자료 링크가 포함되어 있습니다. 모든 실험실에 슬라이드쇼가 포함되지는 않습니다. 이 슬라이드는 학생들에게 배경 정보와 영감을 제공하는 데 도움이 될 수 있다. 모든 슬라이드는 편집할 수 있으며 학생을 위해 투영하거나 교사 자료로 사용할 수 있습니다.
| 재료 | 목적 | 권장 사항 |
|---|---|---|
|
123 로봇 |
교사와 학생이 프로젝트를 만들고 시작하고 123 로봇 행동을 관찰할 수 있습니다. | 그룹당 1개 |
| 실험을 진행하는 동안 시각적 도움을 받을 수 있습니다. | 1 클래스가 볼 수 있도록 | |
|
123 타일 |
프로젝트의 테스트 표면으로 사용. | 그룹당 1개 |
|
123 아트 링 |
123 로봇에 발명을 부착하여 로봇이 123 타일을 클리어하도록 하기 위한 것입니다. | 그룹당 1개 |
|
교실 미술 용품 (파이프 클리너, 폼폼 등) |
123 로봇에 부착하여 123 타일을 클리어하는 발명을 생성합니다. | 전체 수강생이 이용할 수 있는 1세트 |
|
건조 지우기 마커 (선택 사항) |
123 로봇이 123 타일에 걸릴 경로를 그리려면. | 그룹당 1개 |
|
화이트보드 지우개 (선택 사항) |
실험실 끝에 있는 타일에 그려진 모든 경로를 지웁니다. | 반원들이 공유할 수 있는 1 |
|
VEX 123 PDF 인쇄물 (선택 사항) |
학생 프로젝트 계획 및 저축을 지원하기 위한 조작으로 사용. | 그룹당 1개 |
환경 설정
- 수업 전에 각 그룹에 필요한 자료를 수집한다. 이 랩의 경우 두 명의 학생으로 구성된 각 그룹에는 다음이 필요합니다.
- 123 로봇
- A 123 Tile
- 123 아트 링
- 123 로봇이 타일에서 물건을 밀어내는 데 도움이 되는 발명품을 만들기 위한 교실 미술 용품 (예: 파이프 클리너), 타일을 치우기 위한 물품 (예: 폼폼 또는 작은 종이 공).
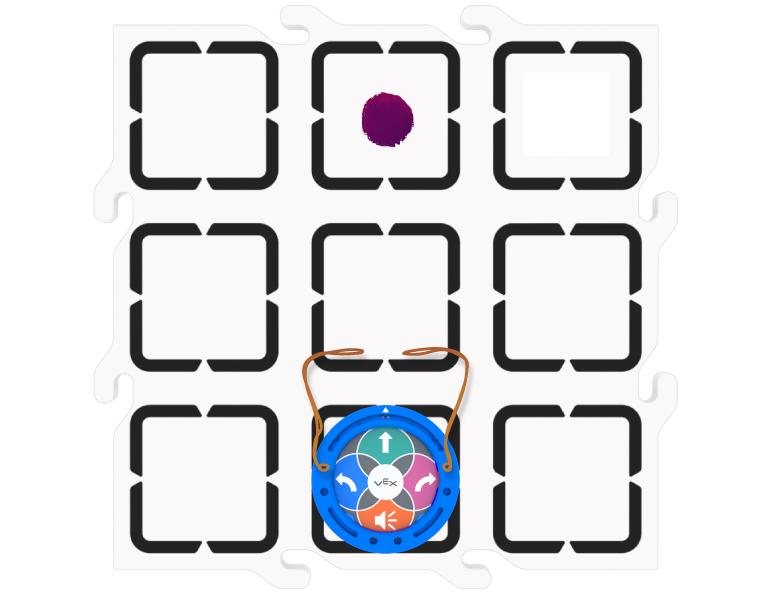
- 플레이 파트 1의 경우, 그룹이 아래와 같이 하나의 폼폼으로 타일을 설정하도록 할 수 있습니다. 이미지는 또한 아트 링 위에 구축된 발명의 예를 보여줍니다.
- 학생들에게 책임을 공유하는 방법에 대한 지침을 제공하여 학생들이 교대로 랩 활동에 집중하고 집중할 수 있도록 돕는다. 권장된 두 학생보다 큰 그룹의 경우, 학생들에게 더 세분화된 역할을 제공한다. 이 실습에 참여하는 학생들의 책임 예시:
- 타일에 폼폼을 배치합니다.
- 터치 버튼을 눌러 프로젝트를 생성합니다.
- 123 로봇을 타일에 올바른 위치에 놓습니다.
- 시작 버튼을 눌러 프로젝트를 시작합니다.
참여
학생들과 함께 참여하여 실습을 시작하십시오.
-
 후크
후크
실험실 1에서 우리는 123대의 로봇을 코딩하여 운전하고 단어를 읽는 데 도움을 주었습니다. 로봇이 원하는 곳으로 운전할 수 있도록 올바른 순서로 버튼을 눌러야 한다는 것을 알았습니다. 123 로봇을 코딩할 때 순서가 왜 중요하다고 생각하시나요?
-
 시연하기
시연하기
학생들은 이 실험실에서 "방 청소" 를 돕기 위해 123대의 로봇을 코딩할 것입니다. 그들은 교실 예술 소모품을 사용하여 아트 링을 위한 발명품을 만들어 123 로봇이 타일에서 물건을 밀어내어 "방" 을 청소하는 데 도움이 될 것입니다.
-
 리딩 질문
리딩 질문
123 로봇이 원하는 경로로 이동하도록 버튼 프레스 순서를 어떻게 지정할 수 있을까요?
재생
학생들에게 도입된 개념을 살펴볼 수 있도록 한다.
1부
학생들은 터치 버튼을 눌러 123 로봇이 타일에서 물체를 밀어내는 프로젝트를 만듭니다.
미드플레이 브레이크
학생들은 플레이 파트 1에서 터치 버튼의 기호를 사용하여 터치 프로젝트를 계획하고 만드는 방법을 설명합니다. 또한 버튼 프레스의 순서가 중요하다는 것을 식별하고 올바른 순서로 시퀀싱하지 않으면 123 로봇이 의도한 대로 움직이지 않습니다.
2부
학생들은 Play Part 1에서 배운 내용을 토대로 Touch 프로젝트에서 버튼을 눌러 123 로봇이 타일에서 여러 개를 지우도록 합니다.
대체 코딩 방법
이 랩은 123 로봇의 버튼을 사용하여 코드를 만지도록 작성되었지만 Coder 또는 VEXcode 123을 사용하여 완료할 수도 있습니다. 이 실험실을 코더에 맞게 조정하는 경우 각 그룹에 코더 및 드라이브 1, 좌회전 및 우회전 코더 카드를 제공하여 123 로봇을 이동하여 타일에서 개체를 지우는 프로젝트를 만듭니다. Coder 사용 방법에 대한 자세한 내용은 Using the VEX 123 Coder VEX Library (VEX 123 Coder VEX 라이브러리 사용) 문서를 참조하십시오. VEXcode 123을 사용하도록 실습을 수정하는 경우 학생들에게 태블릿 또는 컴퓨터를 제공하고 VEXcode 123의 [Drive for] 및 [Turn for] 블록을 사용하여 프로젝트를 빌드합니다. VEXcode 123 사용에 대한 자세한 내용은 VEX 라이브러리의 VEXcode 123 섹션을 참조하십시오.
공유
학생들이 자신의 학습 내용을 토론하고 게시할 수 있도록 한다.
활성 공유
- 이 과제를 해결하는 다양한 방법을 강조하기 위해 각 그룹이 마지막 프로젝트를 공유하여 다른 사람들이 다른 발명품과 학생들이 방을 청소하기 위해 만든 다른 시퀀스를 볼 수 있도록하십시오.

토론 프롬프트
- 도전을 해결하기 위해 행동 순서를 정할 때 터치 버튼의 기호를 어떻게 사용했습니까?
- 그룹에 새로운 회원이 있다면 123 로봇으로 시퀀스를 코딩하는 방법을 어떻게 설명하여 함께 문제를 해결할 수 있습니까?
- 프로젝트에서 버튼을 누르는 순서를 변경하면 어떻게 되나요? 123 로봇도 같은 방식으로 움직일까요? 어떨까요?