
2과: 프로젝트 계획하기
이 수업에서는 energize명령을 사용하여 Disk Mover Playground에서 디스크를 집어 올리고 떨어뜨리는 방법을 알아봅니다. 미니 챌린지에서활성화 명령과 Drivetrain 명령을 사용하여 파란색 디스크 3개를 집어 파란색 목표에 옮깁니다.
학습 성과
- VEXcode VR Python 프로젝트를 계획하고 구성하는 데 주석을 어떻게 사용할 수 있는지 설명하세요.
- VR 로봇이 전자석을 사용하여 디스크를 집어 들고, 운반하고, 떨어뜨리는 프로젝트의 프로그램 흐름을 설명하세요.
전자석을 이용한 프로젝트 계획
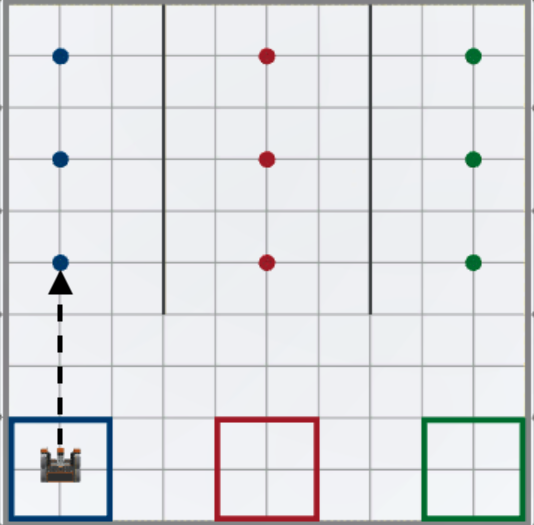
디스크 무버 챌린지를 시작하려면 VR 로봇이 첫 번째 파란색 디스크를 집어 파란색 골로 옮겨야 합니다. 이를 위해 VR 로봇은 전자석과 구동계 명령을 사용하여 4가지 동작을 완료합니다. 코딩 프로젝트의 목표를 개념적으로 이해하고 있는지 확인하기 위해 코드 빌드를 시작하기 전에 프로젝트를 완료하는 데 필요한 동작을 계획하는 것이 좋습니다. 첫 번째 파란색 디스크를 옮기는 목표는 다음과 같이 나눌 수 있습니다.
-
먼저, VR 로봇은 첫 번째 파란색 디스크를 향해 전진합니다.
-
두 번째로, VR 로봇은 전자석을 사용하여 첫 번째 파란색 디스크를 집어 올립니다.
-
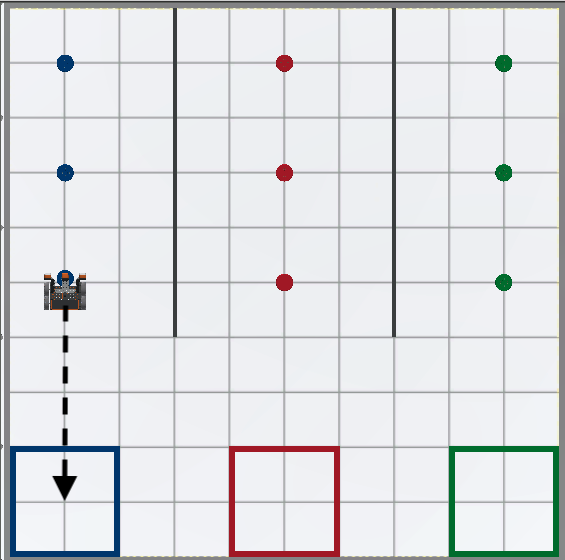
셋째, VR 로봇은 후진하여 파란색 골대로 돌아갑니다.
-
마지막으로, VR 로봇은 전자석을 사용하여 파란색 디스크를 파란색 골에 떨어뜨립니다.

이제 프로젝트의 동작이 식별되었으므로 해당 동작을 사용하여 프로젝트에 대한 주석을 생성할 수 있습니다.
프로젝트 계획을 위한 주석 사용
VEXcode VR Python 프로젝트에서 주석을 사용하면 프로젝트 내에서 더 작은 섹션으로 구성하여 VR 로봇의 동작을 계획하는 데 도움이 됩니다. 프로젝트를 빌드하는 동안 원하는 각 동작과 연관된 명령은 일치하는 주석 아래에 배치됩니다.
- 새 프로젝트를 시작하고 메시지가 표시되면 Disk Mover Playground선택합니다.
-
프로젝트 이름을 Unit8Lesson2.으로 지정하세요.

-
작업 공간에 4개의 주석을 입력합니다. Python에서 주석은 # (파운드) 기호로 시작합니다. 위에 설명된 각 단계에 대한 의견을 추가하세요.
def main(): # 1. 첫 번째 파란색 디스크 # 2로 이동합니다. 첫 번째 파란색 디스크 # 3을 집어 올리세요. 파란색 골 # 4까지 역방향으로 주행하세요. 파란색 디스크를 파란색 골에 넣으세요
주석을 입력하면 한 번에 하나의 명령으로 프로젝트를 빌드할 수 있습니다.
이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.