
Lezione 2: Pianificare il progetto
In questa lezione imparerai come usare il comando energize per raccogliere e rilasciare i dischi nel Disk Mover Playground. Nella mini sfida, utilizzerai il comando energize con i comandi Drivetrain per raccogliere e spostare tre dischi blu nella porta blu.
Risultati di apprendimento
- Descrivere come i commenti possono essere utilizzati per pianificare e organizzare un progetto Python VEXcode VR.
- Descrivere il flusso del programma in un progetto in cui il robot VR utilizza l'elettromagnete per raccogliere, trasportare e quindi rilasciare un disco.
Pianificazione di un progetto con l'elettromagnete
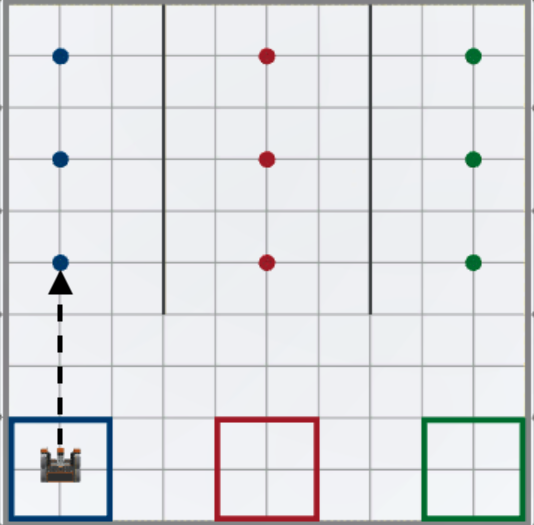
Per iniziare la sfida Disk Mover, il robot VR raccoglierà e sposterà il primo disco blu nell'obiettivo blu. Per fare ciò, il robot VR completerà quattro comportamenti, utilizzando l'elettromagnete e i comandi Drivetrain. È utile pianificare i comportamenti necessari per completare un progetto prima di iniziare a costruire il codice, in modo da poter garantire una comprensione concettuale dell'obiettivo del progetto di codifica. L'obiettivo di spostare il primo disco blu può essere suddiviso come segue:
-
Innanzitutto, il robot VR avanzerà fino al primo disco blu.
-
In secondo luogo, il robot VR utilizzerà l'elettromagnete per raccogliere il primo disco blu.
-
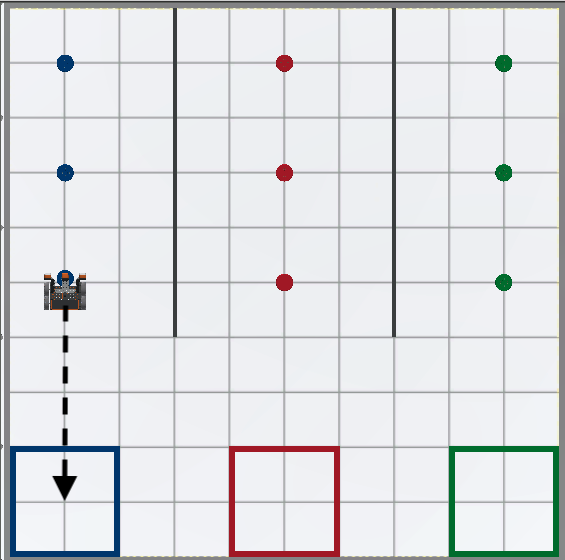
In terzo luogo, il robot VR guiderà in retromarcia verso l'obiettivo blu.
-
Infine, il robot VR utilizzerà l'elettromagnete per far cadere il disco blu nella porta blu.

Ora che i comportamenti nel progetto sono stati identificati, tali comportamenti possono essere utilizzati per creare commenti nel progetto.
Utilizzo dei commenti per la pianificazione del progetto
È possibile utilizzare i commenti in un progetto Python VEXcode VR per aiutare a pianificare i comportamenti del robot VR, organizzandoli in sezioni più piccole all'interno del progetto. Durante la creazione del progetto, i comandi associati a ciascun comportamento desiderato vengono posizionati sotto il commento corrispondente.
- Avviare un nuovo progetto e selezionare il Disk Mover Playground quando richiesto.
-
Denominare il progetto Unit8Lesson2.

-
Digita 4 commenti nello spazio di lavoro. I commenti in Python iniziano con il segno # (libbra). Aggiungi commenti per ciascuno dei passaggi sopra descritti.
def main(): # 1. Vai al primo disco blu # 2. Prendi il primo disco blu # 3. Guida in retromarcia verso l'obiettivo blu n. 4. Rilascia il disco blu nell'obiettivo blu
Con i commenti in atto, possiamo iniziare a costruire il nostro progetto un comando alla volta.
Selezionare il pulsante Avanti per continuare con il resto della lezione.