
الدرس 2: تخطيط المشروع
في هذا الدرس، سوف تتعلم كيفية استخدام الأمر energize لالتقاط الأقراص وإسقاطها على Disk Mover Playground. ستستخدم الأمر تنشيط مع أوامر Drivetrain لالتقاط ثلاثة أقراص زرقاء وتحريكها إلى الهدف الأزرق في التحدي الصغير.
مخرجات التعلم
- صف كيف يمكن استخدام التعليقات لتخطيط وتنظيم مشروع VEXcode VR Python.
- صف تدفق البرنامج في مشروع يستخدم فيه روبوت الواقع الافتراضي المغناطيس الكهربائي لالتقاط قرص وحمله ثم إسقاطه.
تخطيط مشروع باستخدام الكهرومغناطيس
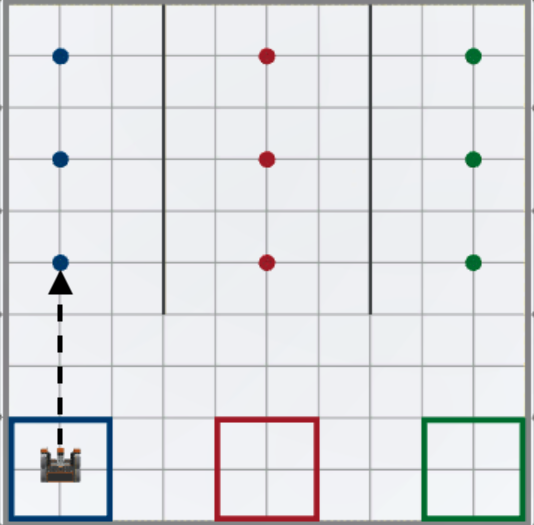
لبدء تحدي محرك الأقراص، سيقوم روبوت الواقع الافتراضي بالتقاط ونقل أول قرص أزرق إلى الهدف الأزرق. من أجل القيام بذلك، سيكمل روبوت الواقع الافتراضي أربعة سلوكيات، باستخدام أوامر الكهرومغناطيس ومجموعة نقل الحركة. من المفيد التخطيط للسلوكيات اللازمة لإكمال المشروع قبل البدء في بناء التعليمات البرمجية الخاصة بك، بحيث يمكنك التأكد من أن لديك فهمًا مفاهيميًا لهدف مشروع الترميز. يمكن تقسيم هدف تحريك القرص الأزرق الأول على النحو التالي:
-
أولاً، سيتقدم روبوت الواقع الافتراضي إلى القرص الأزرق الأول.
-
ثانيًا، سيستخدم روبوت الواقع الافتراضي المغناطيس الكهربائي لالتقاط القرص الأزرق الأول.
-
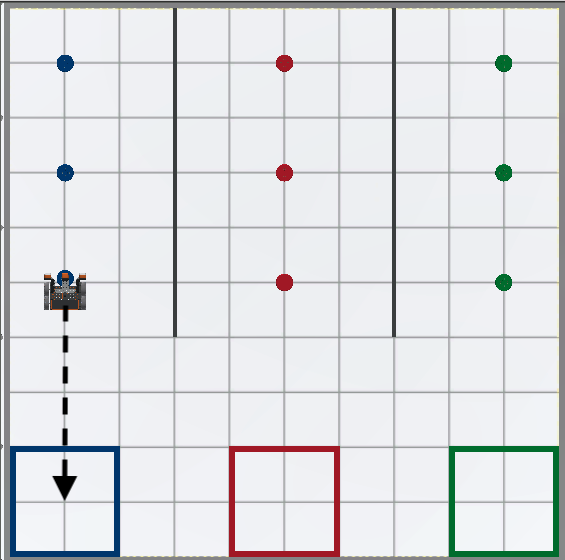
ثالثًا، سيعود روبوت الواقع الافتراضي في الاتجاه المعاكس إلى الهدف الأزرق.
-
أخيرًا، سيستخدم روبوت الواقع الافتراضي المغناطيس الكهربائي لإسقاط القرص الأزرق في الهدف الأزرق.

الآن بعد تحديد السلوكيات في المشروع، يمكن استخدام هذه السلوكيات لإنشاء تعليقات في المشروع.
استخدام التعليقات لتخطيط المشروع
يمكنك استخدام التعليقات في مشروع VEXcode VR Python للمساعدة في تخطيط سلوكيات روبوت VR، من خلال تنظيمها في أقسام أصغر داخل المشروع. أثناء بناء المشروع، يتم وضع الأوامر المرتبطة بكل سلوك مرغوب فيه أسفل التعليق المطابق.
- ابدأ مشروعًا جديدًا وحدد Disk Mover Playground عند مطالبتك بذلك.
-
اسم المشروع Unit8Lesson2.

-
اكتب 4 تعليقات في مساحة العمل. تبدأ التعليقات في بايثون بعلامة # (رطل). أضف تعليقات لكل خطوة من الخطوات الموضحة أعلاه.
def main (): # 1. قم بالقيادة إلى القرص الأزرق الأول رقم 2. التقط القرص الأزرق الأول رقم 3. القيادة في الاتجاه المعاكس للهدف الأزرق رقم 4. أسقط القرص الأزرق في المرمى الأزرق
مع وجود التعليقات، يمكننا البدء في بناء مشروعنا بأمر واحد في كل مرة.
قم باختيار الزر التالي لمواصلة بقية هذا الدرس.