
পাঠ ২: প্রকল্প পরিকল্পনা করুন
এই পাঠে, আপনি শিখবেন কিভাবে ডিস্ক মুভার প্লেগ্রাউন্ডএ ডিস্কগুলি তোলা এবং নামানোর জন্য energizeকমান্ড ব্যবহার করতে হয়। মিনি চ্যালেঞ্জে, আপনি ড্রাইভট্রেন কমান্ডের সাথেenergize কমান্ড ব্যবহার করে তিনটি নীল ডিস্ক তুলে নীল গোলটিতে স্থানান্তর করবেন।
শেখার ফলাফল
- একটি VEXcode VR Python প্রকল্প পরিকল্পনা এবং সংগঠিত করার জন্য মন্তব্যগুলি কীভাবে ব্যবহার করা যেতে পারে তা বর্ণনা করুন।
- একটি প্রকল্পের প্রোগ্রাম প্রবাহ বর্ণনা করুন যেখানে VR রোবট একটি ডিস্ক তোলা, বহন করা এবং তারপর ফেলে দেওয়ার জন্য ইলেক্ট্রোম্যাগনেট ব্যবহার করে।
ইলেক্ট্রোম্যাগনেট ব্যবহার করে একটি প্রকল্প পরিকল্পনা করা
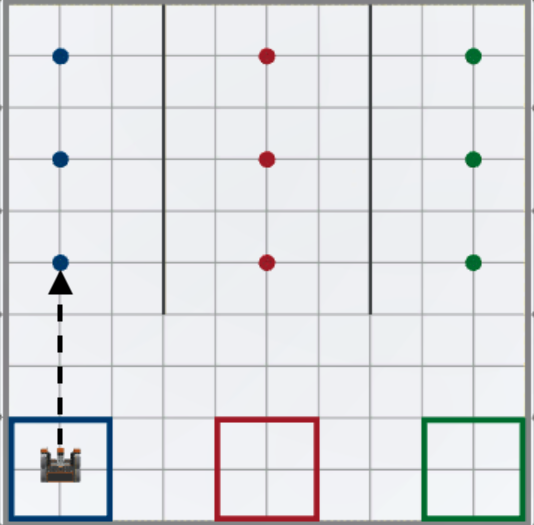
ডিস্ক মুভার চ্যালেঞ্জ শুরু করার জন্য, ভিআর রোবট প্রথম নীল ডিস্কটি তুলে নীল গোলটিতে স্থানান্তর করবে। এটি করার জন্য, ভিআর রোবটটি ইলেক্ট্রোম্যাগনেট এবং ড্রাইভট্রেন কমান্ড ব্যবহার করে চারটি আচরণ সম্পন্ন করবে। কোড তৈরি শুরু করার আগে একটি প্রকল্প সম্পূর্ণ করার জন্য প্রয়োজনীয় আচরণ পরিকল্পনা করা কার্যকর, যাতে আপনি নিশ্চিত করতে পারেন যে কোডিং প্রকল্পের লক্ষ্য সম্পর্কে আপনার ধারণাগত ধারণা রয়েছে। প্রথম নীল ডিস্ক সরানোর লক্ষ্য নিম্নরূপ ভাঙ্গা যেতে পারে:
-
প্রথমে, ভিআর রোবটটি প্রথম নীল ডিস্কের দিকে এগিয়ে যাবে।
-
দ্বিতীয়ত, ভিআর রোবটটি প্রথম নীল ডিস্কটি তুলতে ইলেক্ট্রোম্যাগনেট ব্যবহার করবে।
-
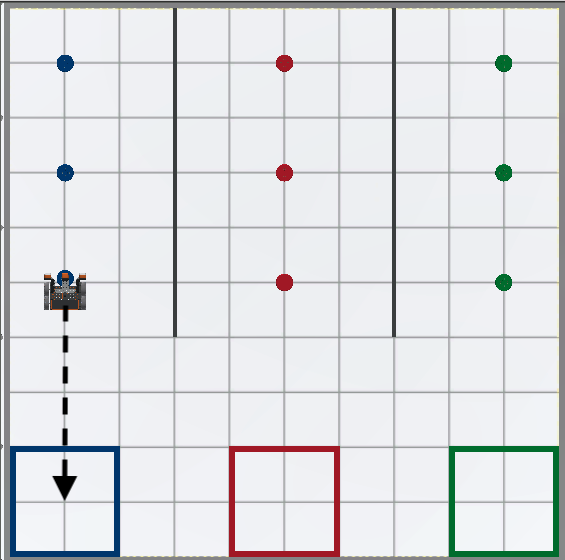
তৃতীয়ত, ভিআর রোবটটি নীল গোলের দিকে উল্টো দিকে গাড়ি চালাবে।
-
অবশেষে, ভিআর রোবটটি নীল গোলকটিতে নীল ডিস্কটি ফেলে দেওয়ার জন্য ইলেক্ট্রোম্যাগনেট ব্যবহার করবে।

এখন যেহেতু প্রকল্পের আচরণগুলি চিহ্নিত করা হয়েছে, সেই আচরণগুলি প্রকল্পে মন্তব্য তৈরি করতে ব্যবহার করা যেতে পারে।
প্রকল্প পরিকল্পনার জন্য মন্তব্য ব্যবহার করা
আপনি একটি VEXcode VR পাইথন প্রকল্পে মন্তব্যগুলি ব্যবহার করতে পারেন যাতে VR রোবটের আচরণগুলিকে প্রকল্পের মধ্যে ছোট অংশে সংগঠিত করে পরিকল্পনা করতে সাহায্য করতে পারেন৷ প্রকল্পটি তৈরি করার সময়, প্রতিটি পছন্দসই আচরণের সাথে সম্পর্কিত কমান্ডগুলি মিলিত মন্তব্যের নীচে স্থাপন করা হয়।
- একটি নতুন প্রকল্প শুরু করুন এবং অনুরোধ করা হলে ডিস্ক মুভার প্লেগ্রাউন্ডনির্বাচন করুন।
-
প্রকল্পটির নাম দিন Unit8Lesson2.

-
কর্মক্ষেত্রে 4 মন্তব্য টাইপ করুন। পাইথনে মন্তব্যগুলি # (পাউন্ড) চিহ্ন দিয়ে শুরু হয়। উপরে বর্ণিত প্রতিটি ধাপের জন্য মন্তব্য যোগ করুন।
ডিফল্ট মেইন(): # ১। প্রথম নীল ডিস্ক # ২-এ গাড়ি চালান। প্রথম নীল ডিস্ক # ৩ তুলে নাও। নীল গোল #৪ এর বিপরীত দিকে গাড়ি চালান। নীল গোলের মধ্যে নীল ডিস্কটি ফেলে দাও।
মন্তব্যগুলি ঠিকঠাক থাকলে, আমরা আমাদের প্রকল্পটি একবারে একটি কমান্ড তৈরি করা শুরু করতে পারি।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।