
Leçon 2 : Planifier le projet
Dans cette leçon, vous apprendrez à utiliser la commande dynamiser pour récupérer et déposer des disques sur le Disk Mover Playground. Vous utiliserez la commande dynamiser avec les commandes Drivetrain pour ramasser et déplacer trois disques bleus dans le but bleu dans le mini défi.
Résultats d'apprentissage
- Décrivez comment les commentaires peuvent être utilisés pour planifier et organiser un projet VEXcode VR Python.
- Décrivez le déroulement du programme dans un projet dans lequel le robot VR utilise l'électroaimant pour ramasser, transporter, puis déposer un disque.
Planification d'un projet avec l'électroaimant
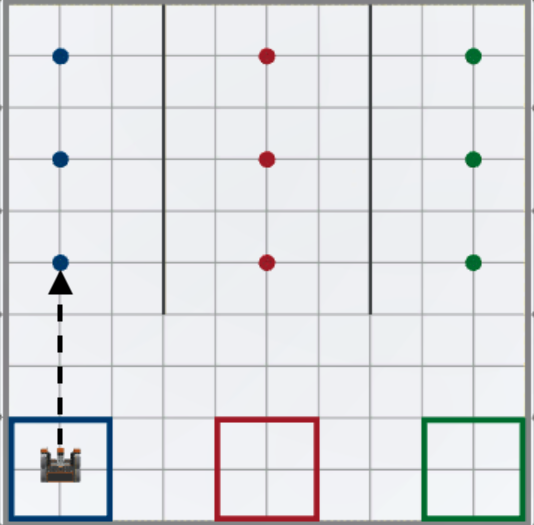
Pour commencer le défi Disk Mover, le robot VR va ramasser et déplacer le premier disque bleu dans l'objectif bleu. Pour ce faire, le robot VR effectuera quatre comportements, en utilisant les commandes Electromagnet et Drivetrain. Il est utile de planifier les comportements nécessaires pour terminer un projet avant de commencer à construire votre code, afin de vous assurer que vous avez une compréhension conceptuelle de l'objectif du projet de codage. L'objectif du déplacement du premier disque bleu peut être décomposé comme suit :
-
Tout d'abord, le robot VR se dirigera vers le premier disque bleu.
-
Deuxièmement, le robot VR utilisera l'électroaimant pour ramasser le premier disque bleu.
-
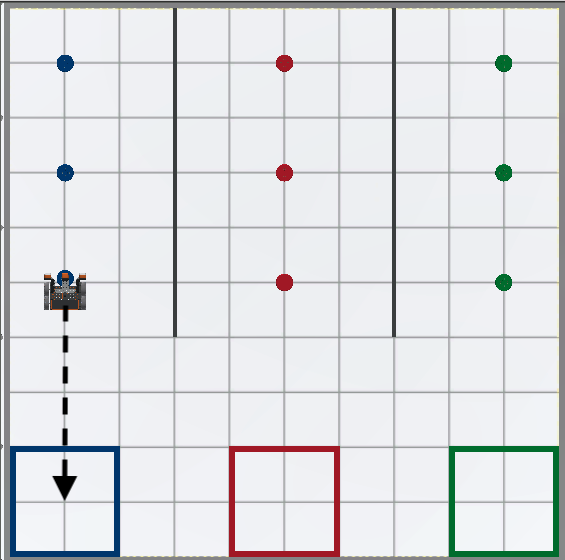
Troisièmement, le robot VR retournera en marche arrière vers l'objectif bleu.
-
Enfin, le robot VR utilisera l'électroaimant pour faire tomber le disque bleu dans l'objectif bleu.

Maintenant que les comportements dans le projet ont été identifiés, ces comportements peuvent être utilisés pour créer des commentaires dans le projet.
Utilisation des commentaires pour la planification de projet
Vous pouvez utiliser les commentaires dans un projet VEXcode VR Python pour aider à planifier les comportements du robot VR, en les organisant en sections plus petites au sein du projet. Lors de la construction du projet, les commandes associées à chaque comportement souhaité sont placées sous le commentaire correspondant.
- Démarrez un nouveau projet et sélectionnez le Disk Mover Playground lorsque vous y êtes invité.

-
Nommez le projet Unit8Lesson2.

-
Tapez 4 commentaires dans l'espace de travail. Les commentaires en Python commencent par le signe # (livre). Ajoutez des commentaires pour chacune des étapes décrites ci-dessus.
def main() : # 1. Conduisez au premier disque bleu n ° 2. Prenez le premier disque bleu n ° 3. Conduisez en marche arrière vers l'objectif bleu n ° 4. Déposez le disque bleu dans l'objectif bleu
Avec les commentaires en place, nous pouvons commencer à construire notre projet une commande à la fois.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.