
บทเรียนที่ 2: วางแผนโครงการ
ในบทเรียนนี้คุณจะได้เรียนรู้วิธี ใช้ คำสั่ง ENERGIZE เพื่อรับและวางดิสก์บน Disk MoverPlayground คุณจะใช้คำสั่ง ENERGIZE กับ คำสั่ง Drivetrain เพื่อรับและย้ายดิสก์สีน้ำเงินสามตัวไปยังเป้าหมายสีน้ำเงินในการท้าทายมินิ
ผลการเรียนรู้
- อธิบายว่าสามารถใช้ความคิดเห็นในการวางแผนและจัดระเบียบโครงการ VEXcode VR Python ได้อย่างไร
- อธิบายขั้นตอนโปรแกรมในโครงการที่มีหุ่นยนต์ VR ใช้แม่เหล็กไฟฟ้าเพื่อรับพกพาจากนั้นวางดิสก์
การวางแผนโครงการด้วยแม่เหล็กไฟฟ้า
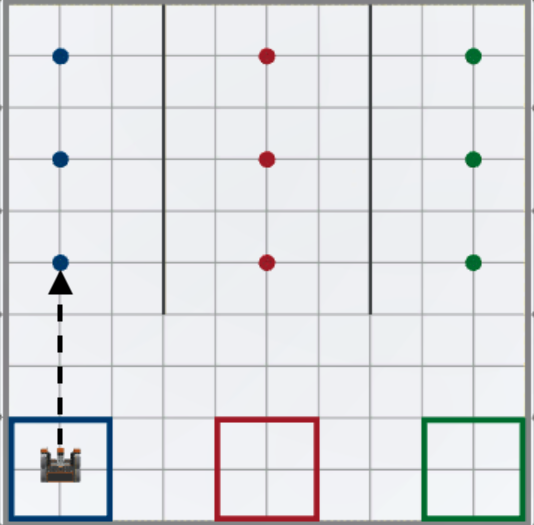
ในการเริ่มต้นการท้าทาย Disk Mover หุ่นยนต์ VR จะรับและย้ายดิสก์สีน้ำเงินตัวแรกไปยังเป้าหมายสีน้ำเงิน ในการทำเช่นนี้หุ่นยนต์ VR จะทำสี่พฤติกรรมโดยใช้แม่เหล็กไฟฟ้า และคำสั่ง Drivetrain มันมีประโยชน์ในการวางแผนพฤติกรรมที่จำเป็นในการทำโครงการให้เสร็จก่อนที่จะเริ่มสร้างรหัสของคุณเพื่อให้คุณสามารถมั่นใจได้ว่าคุณมีความเข้าใจในแนวคิดเกี่ยวกับเป้าหมายของโครงการเข้ารหัส เป้าหมายของการเคลื่อนดิสก์สีน้ำเงินอันแรกสามารถแยกย่อยได้ดังต่อไปนี้:
-
ก่อนอื่นหุ่นยนต์ VR จะขับเคลื่อนไปข้างหน้าไปยังดิสก์สีน้ำเงินตัวแรก
-
ประการที่สองหุ่นยนต์ VR จะใช้แม่เหล็กไฟฟ้าเพื่อ หยิบดิสก์สีน้ำเงินตัวแรก
-
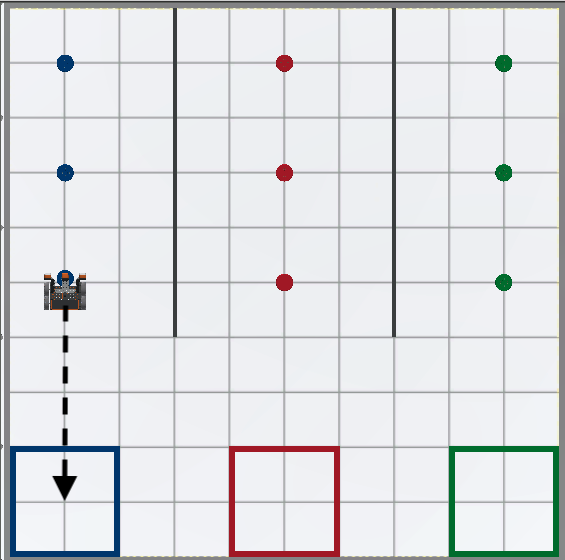
ประการที่สามหุ่นยนต์ VR จะขับย้อนกลับไปยังเป้าหมายสีน้ำเงิน
-
สุดท้ายหุ่นยนต์ VR จะใช้แม่เหล็กไฟฟ้าเพื่อวางดิสก์สีน้ำเงินลงในเป้าหมายสีน้ำเงิน

ตอนนี้พฤติกรรมในโครงการได้รับการระบุแล้วพฤติกรรมเหล่านั้นสามารถนำมาใช้เพื่อสร้างความคิดเห็นในโครงการได้
การใช้ความคิดเห็นสำหรับการวางแผนโครงการ
คุณสามารถใช้ความคิดเห็นในโครงการ VEXcode VR Python เพื่อช่วยวางแผนพฤติกรรมของหุ่นยนต์ VR โดยจัดเป็นส่วนเล็กๆภายในโครงการ ในขณะที่สร้างโครงการคำสั่งที่เกี่ยวข้องกับพฤติกรรมที่ต้องการแต่ละอย่างจะอยู่ใต้ความคิดเห็นที่ตรงกัน
- เริ่มโครงการใหม่และเลือก Disk Mover Playground เมื่อได้รับแจ้ง

-
ตั้งชื่อ โครงการUnit8Lesson2

-
พิมพ์ 4 ความคิดเห็นลงในพื้นที่ทำงาน ความคิดเห็นใน Python เริ่มต้นด้วยเครื่องหมาย # (ปอนด์) เพิ่มความคิดเห็นสำหรับแต่ละขั้นตอนที่ระบุไว้ข้างต้น
def main (): #1. ขับไปที่ดิสก์สีน้ำเงินตัวแรก #2 หยิบดิสก์สีฟ้าอันแรก #3 ขับรถย้อนกลับไปยังเป้าหมายสีน้ำเงิน #4 วางดิสก์สีน้ำเงินในประตูสีน้ำเงิน
เมื่อแสดงความคิดเห็นแล้วเราจะเริ่มสร้างโปรเจกต์ได้ทีละคำสั่ง
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป