
Lección 2: Planificar el proyecto
En esta lección, aprenderá cómo utilizar el comando energizar para recoger y soltar discos en el Disk Mover Playground. Utilizarás el comando energizar con los comandos Drivetrain para recoger y mover tres discos azules hacia el objetivo azul en el mini desafío.
Resultados de aprendizaje
- Describir cómo se pueden usar los comentarios para planificar y organizar un proyecto VEXcode VR Python.
- Describa el flujo del programa en un proyecto en el que el robot de realidad virtual utiliza el electroimán para recoger, transportar y luego soltar un disco.
Planificación de un proyecto con el electroimán
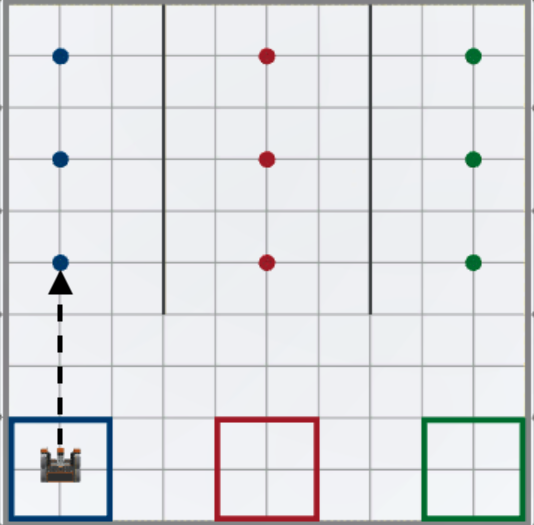
Para comenzar el desafío de Mover discos, el Robot VR recogerá y moverá el primer disco azul a la meta azul. Para hacer esto, el robot VR completará cuatro comportamientos, utilizando los comandos Electromagneto y Tren de transmisión. Es útil planificar los comportamientos necesarios para completar un proyecto antes de comenzar a construir tu código, para que puedas asegurarte de tener una comprensión conceptual del objetivo del proyecto de codificación. El objetivo de mover el primer disco azul se puede desglosar de la siguiente manera:
-
En primer lugar, el robot VR avanzará hasta el primer disco azul.
-
En segundo lugar, el robot VR utilizará el electroimán para recoger el primer disco azul.
-
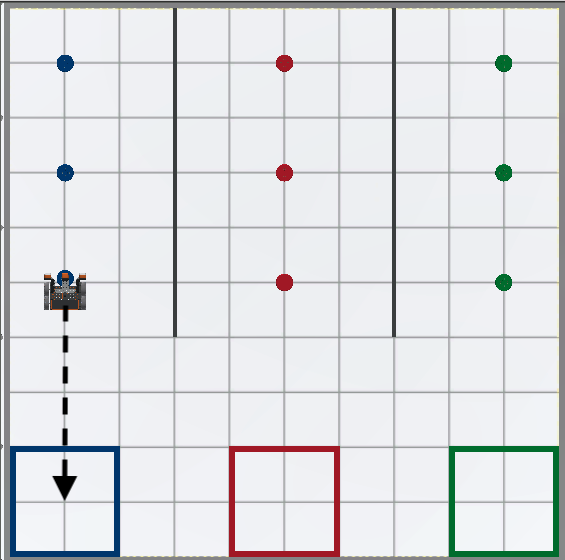
En tercer lugar, el robot VR conducirá en reversa de vuelta a la meta azul.
-
Por último, el robot VR utilizará el electroimán para colocar el disco azul en la portería azul.

Ahora que se han identificado los comportamientos en el proyecto, esos comportamientos se pueden usar para crear comentarios en el proyecto.
Uso de comentarios para la planificación de proyectos
Puede utilizar los comentarios en un proyecto VEXcode VR Python para ayudar a planificar los comportamientos del robot VR, organizándolos en secciones más pequeñas dentro del proyecto. Mientras se construye el proyecto, los comandos asociados con cada comportamiento deseado se colocan debajo del comentario correspondiente.
- Inicie un nuevo proyecto y seleccione Disk Mover Playground cuando se le solicite.
-
Nombra el proyecto Unit8Lesson2.

-
Escriba 4 comentarios en el área de trabajo. Los comentarios en Python comienzan con el signo # (libra). Añade comentarios para cada uno de los pasos descritos anteriormente.
def main(): # 1. Conduzca hasta el primer disco azul # 2. Recoge el primer disco azul # 3. Conduce en reversa hasta la meta azul n .º 4. Deja caer el disco azul en la portería azul
Con los comentarios en su lugar, podemos comenzar a construir nuestro proyecto un comando a la vez.
Seleccione el botón Siguiente para continuar con el resto de esta lección.