
Lektion 2: Planen Sie das Projekt
In dieser Lektion lernen Sie, wie Sie mit dem Befehl energize Datenträger auf dem Disk Mover Playgroundaufnehmen und ablegen. Sie verwenden den Befehl Energize Command mit Drivetrain-Befehlen, um in der Mini-Herausforderung drei blaue Scheiben aufzunehmen und in das blaue Ziel zu bewegen.
Lernergebnisse
- Beschreiben Sie, wie Kommentare verwendet werden können, um ein VEXcode VR Python-Projekt zu planen und zu organisieren.
- Beschreiben Sie den Programmablauf in einem Projekt, bei dem der VR-Roboter den Elektromagneten zum Aufnehmen, Tragen und Ablegen einer Festplatte verwendet.
Planung eines Projekts mit dem Elektromagneten
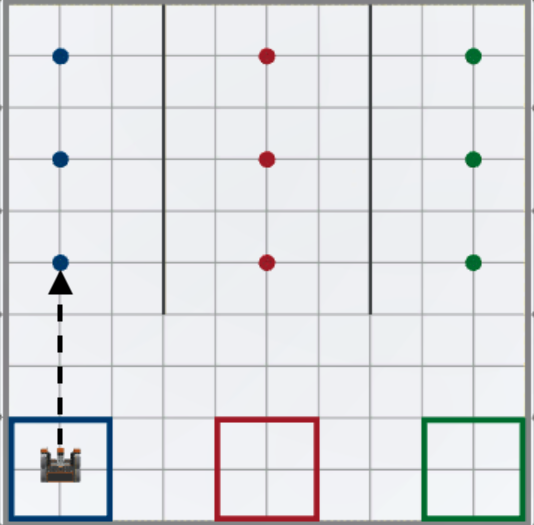
Um die Disk Mover-Herausforderung zu beginnen, nimmt der VR-Roboter die erste blaue Festplatte auf und bewegt sie in das blaue Ziel. Um dies zu tun, führt der VR-Roboter vier Verhaltensweisen aus, indem er den Elektromagneten und die Antriebsstrangbefehle verwendet. Es ist nützlich, die Verhaltensweisen zu planen, die erforderlich sind, um ein Projekt abzuschließen, bevor Sie mit der Erstellung Ihres Codes beginnen, damit Sie sicherstellen können, dass Sie ein konzeptionelles Verständnis des Ziels des Codierungsprojekts haben. Das Ziel, die erste blaue Platte zu verschieben, lässt sich wie folgt aufteilen:
-
Zuerst fährt der VR-Roboter zur ersten blauen Festplatte.
-
Zweitens verwendet der VR-Roboter den Elektromagneten, um die erste blaue Festplatte aufzunehmen.
-
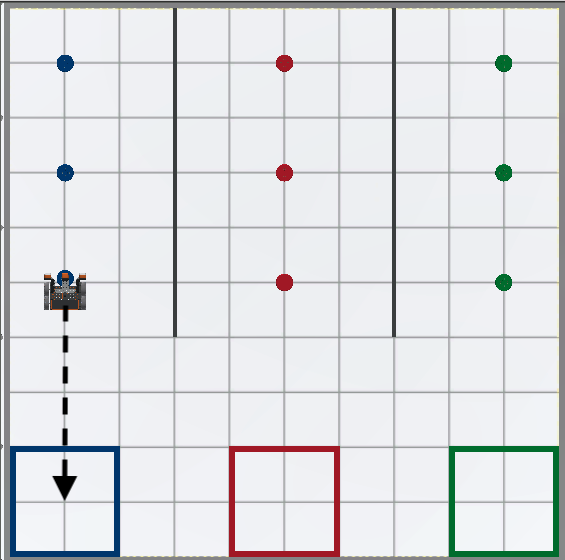
Drittens fährt der VR-Roboter rückwärts zurück zum blauen Tor.
-
Schließlich wird der VR-Roboter den Elektromagneten verwenden, um die blaue Scheibe in das blaue Tor fallen zu lassen.

Nachdem die Verhaltensweisen im Projekt identifiziert wurden, können diese Verhaltensweisen verwendet werden, um Kommentare im Projekt zu erstellen.
Verwenden von Kommentaren für die Projektplanung
Sie können Kommentare in einem VEXcode VR Python-Projekt verwenden, um das Verhalten des VR-Roboters zu planen, indem Sie sie in kleinere Abschnitte innerhalb des Projekts organisieren. Beim Erstellen des Projekts werden die Befehle, die mit jedem gewünschten Verhalten verknüpft sind, unter dem passenden Kommentar platziert.
- Starten Sie ein neues Projekt und wählen Sie den Disk Mover Playground, wenn Sie dazu aufgefordert werden.
-
Benennen Sie das Projekt Unit8Lesson2.

-
Geben Sie 4 Kommentare in den Arbeitsbereich ein. Kommentare in Python beginnen mit dem # (Pfund) -Zeichen. Fügen Sie Kommentare für jeden der oben beschriebenen Schritte hinzu.
def main(): # 1. Fahren Sie zur ersten blauen Festplatte # 2. Nimm die erste blaue Scheibe # 3. Fahren Sie rückwärts zum blauen Ziel # 4. Legen Sie die blaue Scheibe im blauen Ziel ab
Wenn Kommentare vorhanden sind, können wir mit dem Aufbau unseres Projekts einen Befehl nach dem anderen beginnen.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.