
पाठ 2: परियोजना की योजना बनाएँ
इस पाठ में, आप सीखेंगे कि डिस्क मूवर प्लेग्राउंडपर डिस्क को उठाने और छोड़ने के लिए एनर्जाइज़कमांड का उपयोग कैसे करें। आप मिनी चैलेंज में तीन नीली डिस्क को उठाकर नीले लक्ष्य में ले जाने के लिए ड्राइवट्रेन कमांड के साथएनर्जाइज़ कमांड का उपयोग करेंगे।
सीखने के परिणाम
- वर्णन करें कि VEXcode VR पायथन परियोजना की योजना बनाने और उसे व्यवस्थित करने के लिए टिप्पणियों का उपयोग कैसे किया जा सकता है।
- उस परियोजना में कार्यक्रम प्रवाह का वर्णन करें जिसमें VR रोबोट इलेक्ट्रोमैग्नेट का उपयोग करके एक डिस्क को उठाता है, ले जाता है, फिर उसे छोड़ता है।
विद्युत चुम्बक के साथ एक परियोजना की योजना बनाना
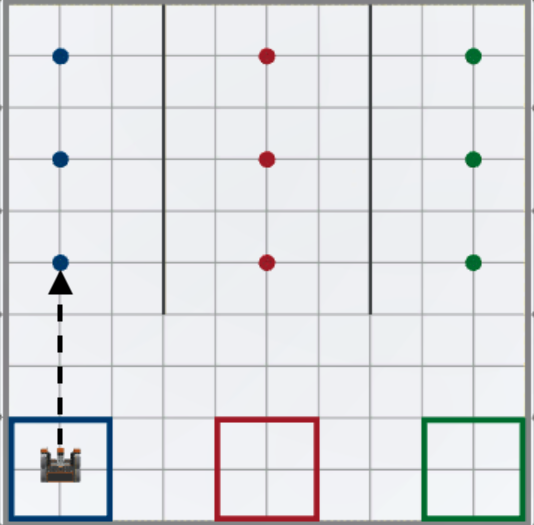
डिस्क मूवर चुनौती शुरू करने के लिए, वीआर रोबोट पहली नीली डिस्क को उठाएगा और उसे नीले गोल में ले जाएगा। ऐसा करने के लिए, वीआर रोबोट इलेक्ट्रोमैग्नेट और ड्राइवट्रेन कमांड का उपयोग करके चार व्यवहार पूरे करेगा। अपना कोड बनाना शुरू करने से पहले किसी परियोजना को पूरा करने के लिए आवश्यक व्यवहारों की योजना बनाना उपयोगी होता है, ताकि आप यह सुनिश्चित कर सकें कि आपको कोडिंग परियोजना के लक्ष्य की वैचारिक समझ है। पहली नीली डिस्क को स्थानांतरित करने का लक्ष्य निम्न प्रकार से विभाजित किया जा सकता है:
-
सबसे पहले, वी.आर. रोबोट पहली नीली डिस्क की ओर आगे बढ़ेगा।
-
दूसरा, वीआर रोबोट पहली नीली डिस्क को उठाने के लिए इलेक्ट्रोमैग्नेट का उपयोग करेगा।
-
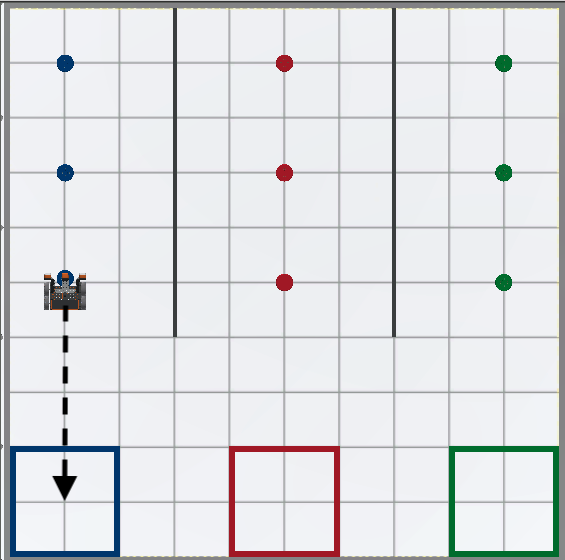
तीसरा, वी.आर. रोबोट नीले गोल की ओर उल्टी दिशा में वापस आएगा।
-
अंत में, वीआर रोबोट इलेक्ट्रोमैग्नेट का उपयोग करके नीली डिस्क को नीले लक्ष्य में गिराएगा।

अब चूंकि परियोजना में व्यवहारों की पहचान हो गई है, इसलिए उन व्यवहारों का उपयोग परियोजना में टिप्पणियाँ बनाने के लिए किया जा सकता है।
परियोजना नियोजन के लिए टिप्पणियों का उपयोग
आप VEXcode VR पायथन परियोजना में टिप्पणियों का उपयोग VR रोबोट के व्यवहार की योजना बनाने में मदद के लिए कर सकते हैं, उन्हें परियोजना के भीतर छोटे-छोटे खंडों में व्यवस्थित करके। प्रोजेक्ट बनाते समय, प्रत्येक वांछित व्यवहार से जुड़े कमांड को मिलान वाली टिप्पणी के नीचे रखा जाता है।
- एक नया प्रोजेक्ट शुरू करें और संकेत मिलने पर डिस्क मूवर प्लेग्राउंडका चयन करें।
-
परियोजना का नाम बताइए इकाई8पाठ2.

-
कार्यक्षेत्र में 4 टिप्पणियाँ लिखें. पायथन में टिप्पणियाँ # (पाउंड) चिह्न से शुरू होती हैं। ऊपर बताए गए प्रत्येक चरण के लिए टिप्पणियाँ जोड़ें।
def मुख्य(): # 1. पहली नीली डिस्क # 2 पर ड्राइव करें। पहली नीली डिस्क # 3 उठाओ। नीले गोल # 4 की ओर रिवर्स में ड्राइव करें। नीली डिस्क को नीले गोल में गिराएँ
टिप्पणियों के साथ, हम एक समय में एक कमांड के साथ अपना प्रोजेक्ट बनाना शुरू कर सकते हैं।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।