
Lição 2: Planear o Projeto
Nesta lição, aprenderá a utilizar o comando energize para apanhar e largar discos no Disk Mover Playground. Utilizará o comando energizar com comandos Drivetrain para apanhar e mover três discos azuis para a baliza azul no mini desafio.
Resultados de Aprendizagem
- Descreva como os comentários podem ser usados para planejar e organizar um projeto VEXcode VR Python.
- Descreva o fluxo do programa num projeto em que o Robô de RV usa o Eletroímã para pegar, transportar e, em seguida, soltar um disco.
Planeamento de um Projeto com o Eletroímã
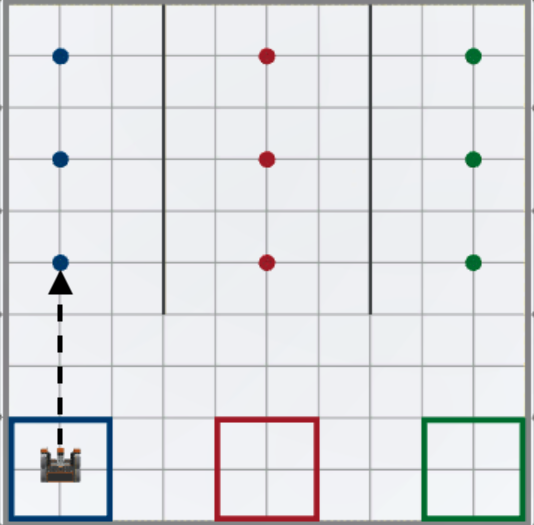
Para iniciar o desafio do Disk Mover, o Robô VR pegará e moverá o primeiro disco azul para a meta azul. Para fazer isso, o Robô VR completará quatro comportamentos, usando os comandos Electromagnet e Drivetrain. É útil planejar os comportamentos necessários para concluir um projeto antes de começar a construir seu código, para que você possa garantir que tenha uma compreensão conceitual do objetivo do projeto de codificação. O objetivo de mover o primeiro disco azul pode ser dividido da seguinte forma:
-
Primeiro, o robô VR avançará para o primeiro disco azul.
-
Em segundo lugar, o robô VR usará o eletroímã para pegar o primeiro disco azul.
-
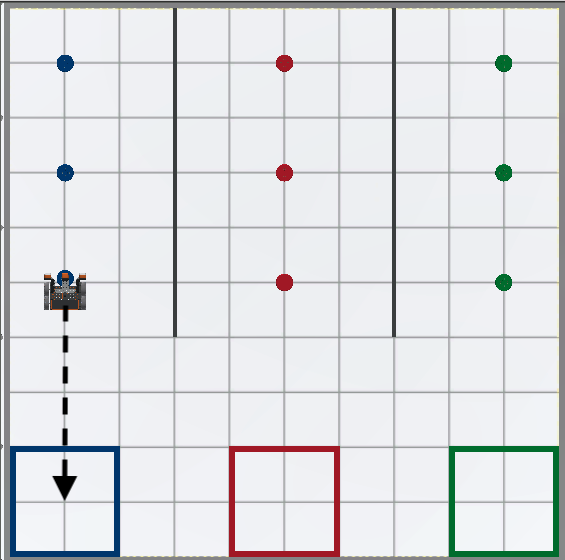
Em terceiro lugar, o robô VR irá conduzir em sentido inverso de volta para a baliza azul.
-
Por fim, o robô VR usará o eletroímã para soltar o disco azul na baliza azul.

Agora que os comportamentos no projeto foram identificados, esses comportamentos podem ser usados para criar comentários no projeto.
Usar comentários para o planeamento do projeto
Pode usar comentários num projeto VEXcode VR Python para ajudar a planear os comportamentos do Robô VR, organizando-os em secções mais pequenas dentro do projeto. Ao construir o projeto, os comandos associados a cada comportamento desejado são colocados abaixo do comentário correspondente.
- Inicie um novo projeto e selecione o Disk Mover Playground quando solicitado.

-
Nomeie o projeto como Unit8Lesson2.

-
Digite 4 comentários no espaço de trabalho. Comentários em Python começam com o sinal # (pound). Adicione comentários para cada uma das etapas descritas acima.
def main(): # 1. Dirija para o primeiro disco azul # 2. Pegue o primeiro disco azul # 3. Dirija em sentido inverso para a meta azul # 4. Solte o disco azul na meta azul
Com os comentários em vigor, podemos começar a construir o nosso projeto um comando de cada vez.
Selecione o botão Seguinte para continuar com o resto desta lição.