
Bài 2: Lập kế hoạch cho dự án
Trong Bài học này, bạn sẽ học cách sử dụng lệnh energizeđể nhặt và thả đĩa trên Sân chơi di chuyển đĩa . Bạn sẽ sử dụng lệnhkích hoạt với lệnh Truyền động để nhặt và di chuyển ba đĩa màu xanh vào mục tiêu màu xanh trong thử thách nhỏ.
Kết quả học tập
- Mô tả cách sử dụng bình luận để lập kế hoạch và tổ chức dự án VEXcode VR Python.
- Mô tả luồng chương trình trong một dự án mà Robot VR sử dụng Nam châm điện để nhặt, mang và thả đĩa.
Lập kế hoạch cho một dự án với nam châm điện
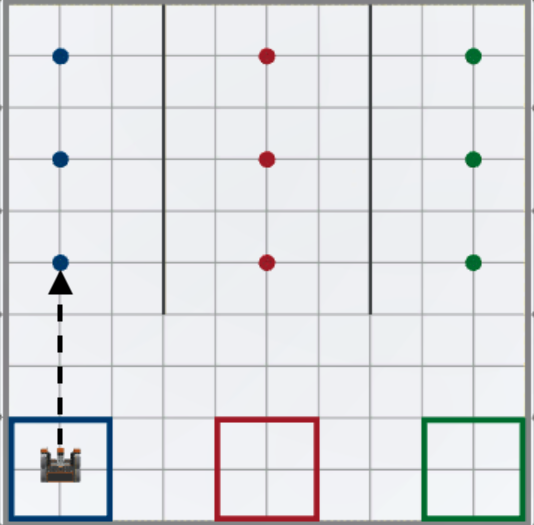
Để bắt đầu thử thách Di chuyển đĩa, Robot VR sẽ nhặt và di chuyển đĩa màu xanh đầu tiên vào mục tiêu màu xanh. Để thực hiện được điều này, VR Robot sẽ hoàn thành bốn hành vi bằng cách sử dụng lệnh Điện từ và lệnh Truyền động. Việc lập kế hoạch các hành vi cần thiết để hoàn thành một dự án trước khi bắt đầu xây dựng mã là rất hữu ích, để bạn có thể đảm bảo rằng mình hiểu rõ về mục tiêu của dự án lập trình. Mục tiêu của việc di chuyển đĩa màu xanh đầu tiên có thể được chia nhỏ như sau:
-
Đầu tiên, Robot VR sẽ di chuyển về phía đĩa màu xanh đầu tiên.
-
Thứ hai, Robot VR sẽ sử dụng Nam châm điện để nhặt đĩa màu xanh đầu tiên.
-
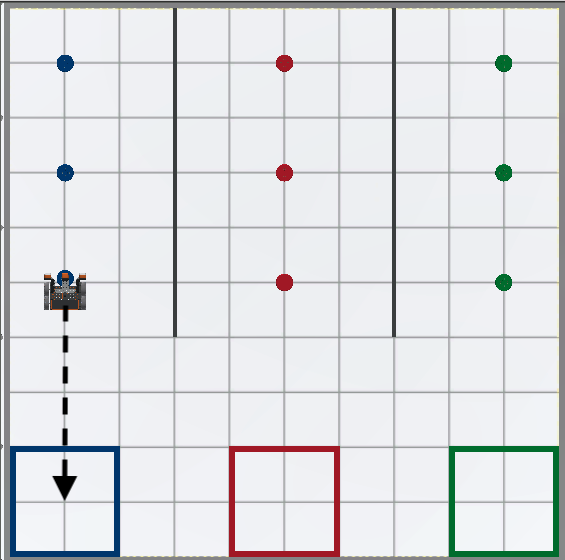
Thứ ba, Robot VR sẽ lái ngược trở lại mục tiêu màu xanh.
-
Cuối cùng, Robot VR sẽ sử dụng Nam châm điện để thả đĩa màu xanh vào mục tiêu màu xanh.

Bây giờ các hành vi trong dự án đã được xác định, những hành vi đó có thể được sử dụng để tạo bình luận trong dự án.
Sử dụng bình luận để lập kế hoạch dự án
Bạn có thể sử dụng chú thích trong dự án VEXcode VR Python để lập kế hoạch cho hành vi của Robot VR bằng cách sắp xếp chúng thành các phần nhỏ hơn trong dự án. Trong khi xây dựng dự án, các lệnh liên quan đến từng hành vi mong muốn sẽ được đặt bên dưới chú thích phù hợp.
- Bắt đầu một dự án mới và chọn Disk Mover Playgroundkhi được nhắc.
-
Đặt tên cho dự án Unit8Lesson2.

-
Nhập 4 bình luận vào không gian làm việc. Bình luận trong Python bắt đầu bằng dấu # (pound). Thêm bình luận cho từng bước được nêu ở trên.
def main(): # 1. Lái xe đến đĩa màu xanh đầu tiên # 2. Nhặt đĩa màu xanh đầu tiên # 3. Lái xe ngược lại đến mục tiêu màu xanh số # 4. Thả đĩa màu xanh vào mục tiêu màu xanh
Sau khi đã thêm chú thích, chúng ta có thể bắt đầu xây dựng dự án theo từng lệnh một.
Chọn nút Tiếp theo để tiếp tục phần còn lại của Bài học này.