
Voordat je begint
In deze module bouwen leerlingen verder aan hun begrip van de besturing om de virtuele VEX AIR-drone te bewegen met behulp van de rolbesturing op de VEX AIR-dronecontroller. Ze leren ook over twee stuurmodi: standaard en headless. Ze zullen deze nieuwe vaardigheden oefenen door met beide stuurmethoden door de blauwe ringen aan weerszijden van het platform te vliegen.
Zorg ervoor dat de leerlingen het volgende bij de hand hebben voordat u begint:
- Een opgeladen VEX AIR dronecontroller
- Een USB-C-kabel
- Een computer met toegang tot VEXcode AIR
Leerdoelen:
Deze module is ontworpen om leerlingen kennis te laten maken met de rolbesturing en stuurmodi in de VEX AIR vluchtsimulator, zodat ze hun mogelijkheden om de virtuele drone te besturen kunnen uitbreiden. Aan het einde van deze module zullen de leerlingen in staat zijn om:
- Definieer rollen als de beweging waardoor een drone van links naar rechts langs de x-as beweegt.
- Beschrijf de bewegingen van een drone in een driedimensionale ruimte met behulp van termen als rollen, stampen, gieren en gas geven.
- Demonstreer gecontroleerde bewegingen naar links en rechts met behulp van de VEX AIR dronecontroller in de simulator.
- Vergelijk de headless- en standaardbesturing bij het besturen van een drone in de simulator.
Afstemming van standaarden
In deze module kunnen de volgende normen worden behaald. Om te leren hoe aan deze normen wordt voldaan en een uitgebreid overzicht van de afstemming van de normen te bekijken, naar standards.vex.com
Common Core English Language Arts (CCSS ELA)
- CCSS.ELA-LITERACY.CCRA.L.6 - Verwerf en gebruik nauwkeurig een reeks algemene academische en vakspecifieke woorden en zinsdelen die voldoende zijn voor lezen, schrijven, spreken en luisteren op het niveau dat nodig is voor hoger onderwijs en een carrière; toon zelfstandig kennis van de woordenschat wanneer u een onbekende term tegenkomt die belangrijk is voor begrip of uitdrukking.
- CCSS.ELA-LITERACY.RST.9-10/11-12.3 - Volg nauwkeurig een complexe procedure met meerdere stappen bij het uitvoeren van experimenten, het nemen van metingen of het verrichten van technische taken, waarbij rekening wordt gehouden met speciale gevallen of uitzonderingen zoals beschreven in de tekst.
- CCSS.ELA-LITERACY.RST.9-10/11-12.4 - Bepaal de betekenis van symbolen, sleuteltermen en andere domeinspecifieke woorden en zinsneden zoals die worden gebruikt in een specifieke wetenschappelijke of technische context die relevant is voor de onderwerpen van het betreffende leerjaar.
Internationale Vereniging voor Technologie in het Onderwijs (ISTE)
- De bekwame leerling - 1.1.c - Leerlingen gebruiken technologie om feedback te vragen die hun leerproces informeert en verbetert, en om hun leerresultaten op verschillende manieren te demonstreren.
- Bekwame leerling – 1.1.d – Leerlingen begrijpen fundamentele concepten over hoe technologie werkt, tonen het vermogen om bestaande technologieën effectief te kiezen en te gebruiken, en zijn bedreven in het doordacht verkennen van opkomende technologieën.
- Kennisconstructie – 1.3.d – Leerlingen bouwen kennis op door zich te verdiepen in vraagstukken uit de praktijk en doen ervaring op met het toepassen van hun leerstof in authentieke situaties.
- Wereldwijde samenwerking - 1.7.c - Studenten leveren een constructieve bijdrage aan projectteams door verschillende rollen en verantwoordelijkheden op zich te nemen om effectief samen te werken aan een gemeenschappelijk doel.
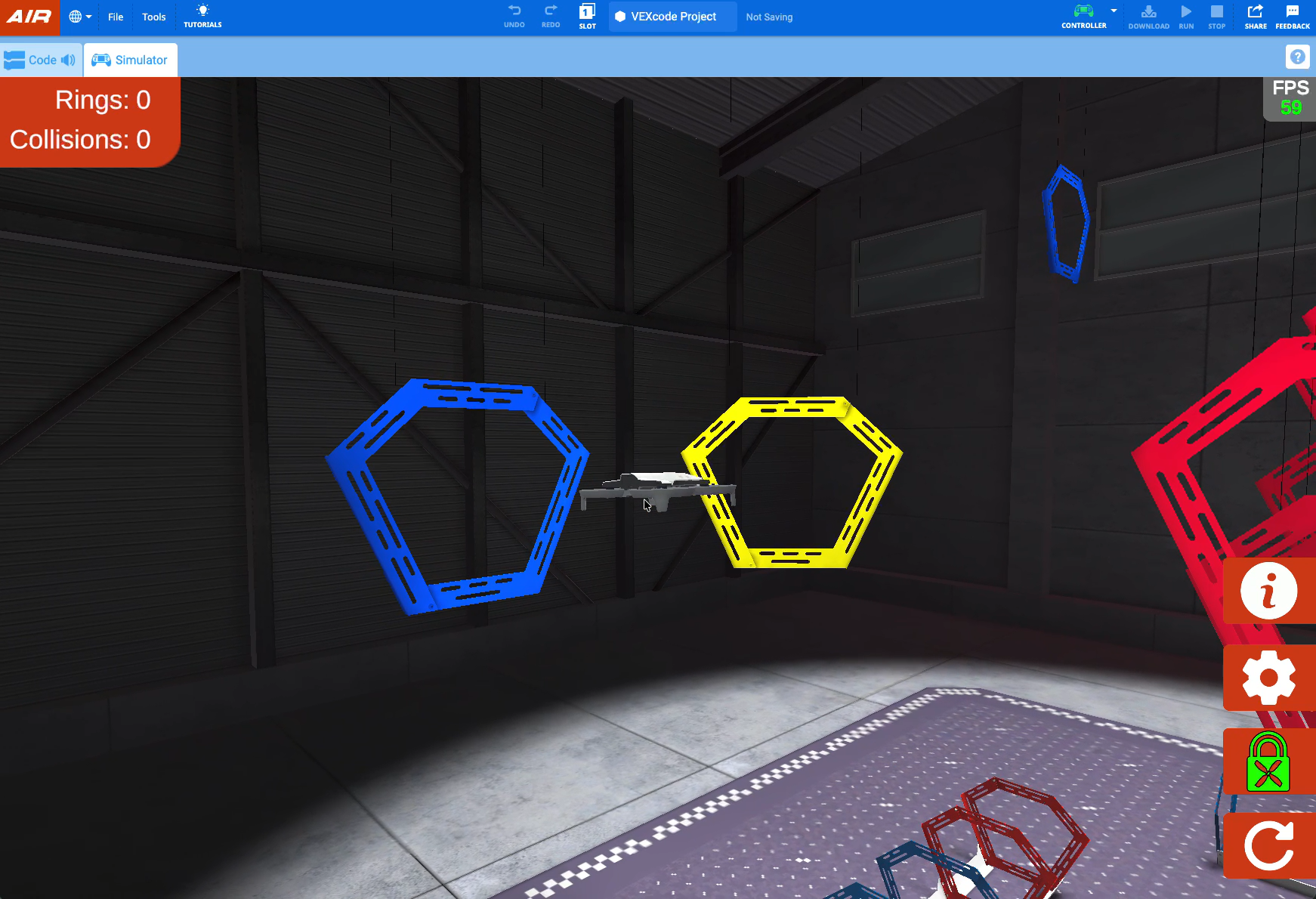
In deze module vergroot u uw kennis over het besturen van de VEX AIR-drone. Je leert hoe je de rolbesturing gebruikt om de drone naar links en rechts te sturen met de VEX AIR Drone Controller. Je leert ook over twee verschillende stuurmodi (standaard en headless) en wanneer en hoe je die moet gebruiken. Aan het einde van de module heb je beide stuurmodi getest tijdens het vliegen door de blauwe ringen aan weerszijden van het platform.
Vocabulaire
De volgende woorden zullen je helpen bij het bespreken van dronebewegingen tijdens deze leseenheid.
- Rol — De beweging waardoor een drone kantelt en van links naar rechts beweegt. Als een drone naar links kantelt, begint hij naar links te bewegen, en als een drone naar rechts kantelt, begint hij naar rechts te bewegen.
- Headless Steering — Een dronebesturingsmodus waarbij de drone altijd beweegt in de richting waarin je de joystick duwt, ongeacht in welke richting de drone zelf wijst.
- Standaardbesturing — Een dronebesturingsmodus waarbij de drone beweegt op basis van de richting waarin de neus wijst.
De volgende woorden zullen je helpen bij het bespreken van dronebewegingen tijdens deze leseenheid.
- Rol — De beweging waardoor een drone kantelt en van links naar rechts beweegt. Als een drone naar links kantelt, begint hij naar links te bewegen, en als een drone naar rechts kantelt, begint hij naar rechts te bewegen.
- Headless Steering — Een dronebesturingsmodus waarbij de drone altijd beweegt in de richting waarin je de joystick duwt, ongeacht in welke richting de drone zelf wijst.
- Standaardbesturing — Een dronebesturingsmodus waarbij de drone beweegt op basis van de richting waarin de neus wijst.
Een effectieve manier om leerlingen te helpen de betekenis van de woorden te onthouden tijdens het leren van de verschillende dronebewegingen, is door ze hun handen of lichaam te laten bewegen in de juiste volgorde van de bewegingen.
Leerlingen kunnen bijvoorbeeld voorover leunen voor de stampbeweging (pitch), van links naar rechts draaien voor de gierbeweging (yaw) en naar links of rechts leunen voor de rolbeweging (roll). Dit helpt hen om elke term te koppelen aan een beweging die ze kunnen voelen en onthouden.
Selecteer Volgende > om naar de volgende les te gaan.