
Les 2: Basisprincipes van computerwetenschappen
In deze les leert u de basisbeginselen van computerwetenschappen, waaronder:
- Wat een programmeertaal is.
- Wat robotgedrag is.
- Hoe je het gedrag van robots kunt aanpassen.
Aan het einde van deze les past u de vaardigheden die u hebt geleerd toe om de gedragingen van de 6-assige robotarm te identificeren, zoals te zien is in de onderstaande video. Ook leert u de VEXcode-blokken kennen die bij elk gedrag horen. In de onderstaande videoclip begint de 6-assige arm in de veilige positie en beweegt vervolgens naar positie 32 van de tegel. Vervolgens beweegt het over de tegel en stopt op tegellocaties 36 en 36, in de rechteronderhoek van de tegel. Vervolgens beweegt de 6-assige arm richting de signaaltoren, stopt bij tegellocatie 24 en stopt bij tegellocatie 12, naast de signaaltoren, die groen knippert terwijl het project wordt uitgevoerd.
Programmeertalen begrijpen
Een programmeertaal is een reeks regels waarin symbolen acties representeren. Programmeertalen volgen stapsgewijze instructies die een computer uitvoert om een project uit te voeren.
VEXcode is de programmeertaal voor de 6-assige arm.
Robotgedrag
Gedragingenzijn de acties die door een robot worden uitgevoerd of moeten worden uitgevoerd. Op en neer bewegen langs een as, stoppen en de lichten op de signaaltoren aan- of uitzetten: dit zijn allemaal gedragingen. Gedragingen worden gedefinieerd door de programmeertaal.
Om het gedrag van de 6-assige arm te wijzigen, kunt u de blokken in een project wijzigen. Deze programmeerblokken worden ook welopdrachtengenoemd. Je hebt opdrachten in de vorige les bewerkt toen je in de activiteit de kleur van de lichten van de signaaltoren veranderde.
Alle blokken die u kunt gebruiken met de 6-assige arm en de signaaltoren vindt u in de Toolbox aan de linkerkant van VEXcode.
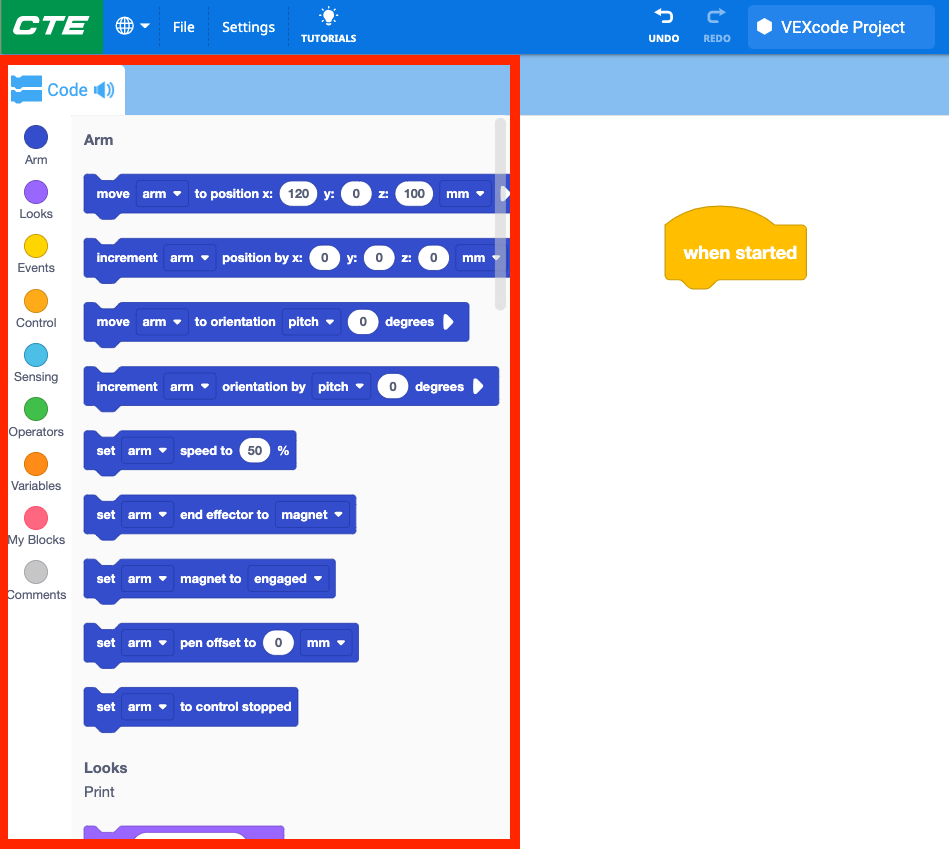
U kunt de volledige lijst met opdrachten openen door door de Toolbox te scrollen, zoals getoond in deze video. In de videoclip wordt door de Toolbox gescrold om de verschillende opdrachten te tonen die u in een project kunt gebruiken.
Ter informatie
U kunt meer over elk blok te weten komen door de Help te openen. In de Help wordt uitgelegd wat een blok doet en hoe u het in een project kunt gebruiken. Om het Help-venster te openen, selecteert u het Help-pictogram en vervolgens het blok waarover u meer wilt weten, zoals getoond in de onderstaande video. In deze videoclip wordt het Help-pictogram met het vraagteken helemaal rechts in VEXcode geselecteerd, waarna het Help-venster wordt geopend. Vervolgens wordt het blok Set signal tower in het project geselecteerd en worden de Help-informatie voor dat blok weergegeven.
Het gedrag van robots aanpassen
Als u de blokken of opdrachten in een project wijzigt, verandert het gedrag van de robot. Het wijzigen van parameters en het toevoegen, verwijderen of rangschikken van blokken in een project heeft allemaal gevolgen voor het gedrag van de robot.
Parameters wijzigen
De (x, y, z)-coördinaten in de parameters van het blok Verplaats naar positie veroorzaken het gedrag van verplaatsen naar die specifieke coördinaat. Wanneer u de parameters in het blok wijzigt, verandert het gedrag van de robot doordat de 6-assige arm naar een andere locatie wordt verplaatst.
In dit project is het gedrag van de 6-assige arm bijvoorbeeld dat deze naar de coördinaat (100, 50, 100) beweegt.
Wanneer u de parameters in het blok wijzigt, wordt de 6-assige arm naar de coördinaat (150, 150, 200) verplaatst. Dat is een ander gedrag dan de vorige opdracht, omdat de 6-assige arm naar een andere locatie beweegt.
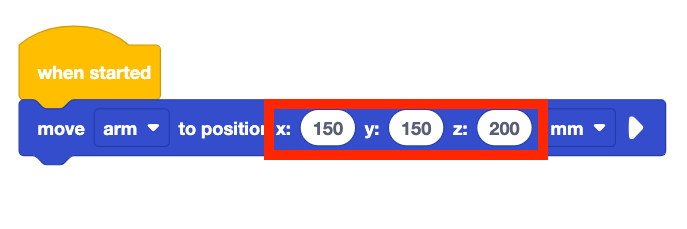
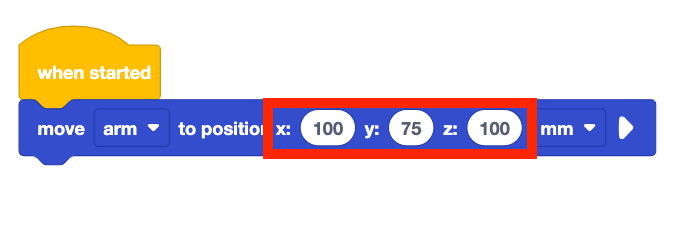
In de onderstaande video wordt het project rechts getoond, waarbij de 6-assige arm naar de coördinaat (100, 75, 100) wordt verplaatst wanneer het project wordt uitgevoerd. De 6-assige arm begint in de veilige positie en beweegt vervolgens naar die coördinaat, waarna het project wordt gestopt. De parameters van het blok Verplaats naar positie worden vervolgens gewijzigd in (150, 150, 200). Wanneer het project voor de tweede keer wordt uitgevoerd, wordt de 6-assige arm naar de nieuwe locatie verplaatst.
Ter informatie
Zoals hierboven vermeld, zijn opdrachten de programmeerblokken in VEXcode EXP die worden gebruikt om het gedrag van de 6-assige arm te besturen.

Parameters zijn de details van elke opdracht. Dit kunnen bijvoorbeeld vervolgkeuzemenu's of andere invoermogelijkheden zijn. In het hier getoonde blok staan veel parameters. Eén om te kiezen met welk apparaat u verbinding wilt maken, één voor elke ascoördinaat en één om de eenheden te bepalen (millimeters of inches).

Blokken herschikken
Blokken in een stapel lopen van boven naar beneden en voeren elk gedrag in die volgorde uit.
Als u de blokken opnieuw rangschikt, verandert het gedrag van de robot; de handelingen worden dan in een andere volgorde uitgevoerd.
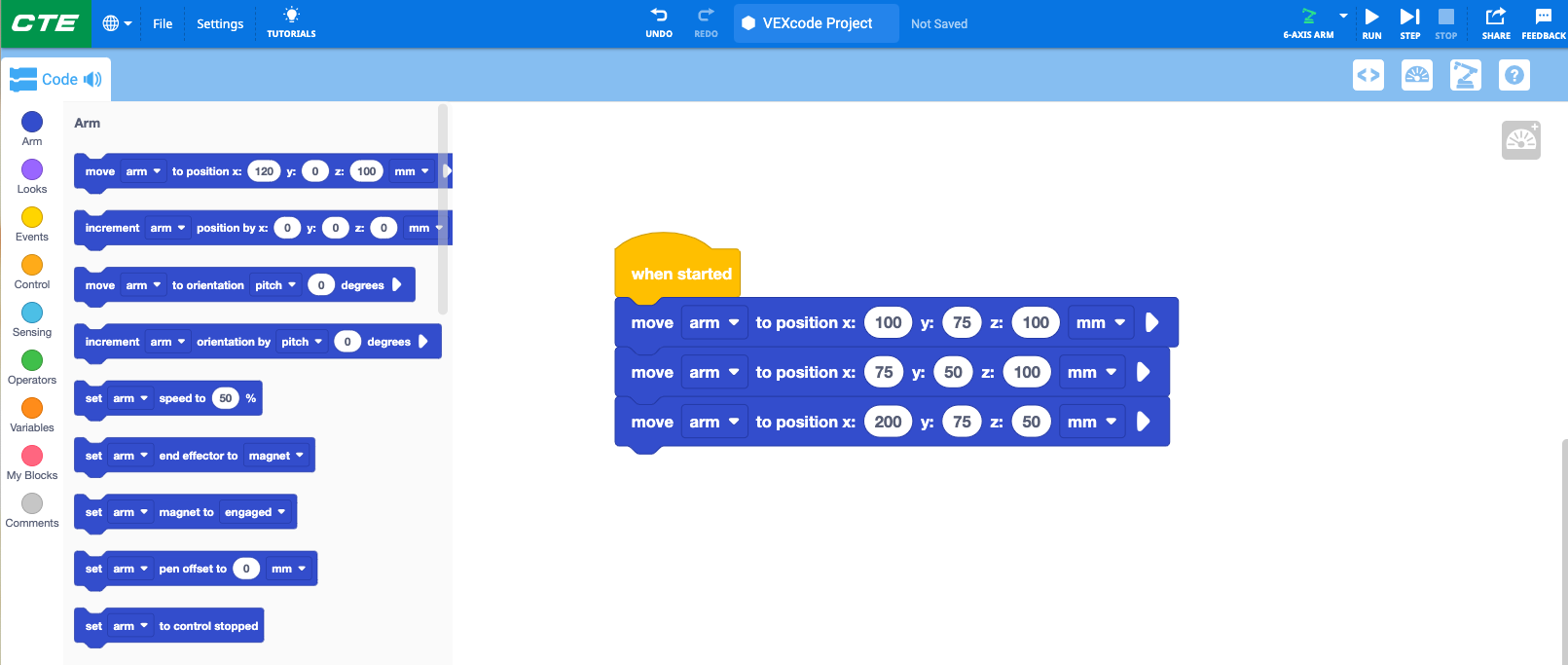
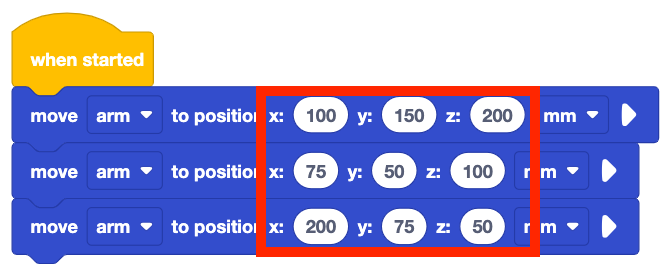
In dit voorbeeld beweegt de 6-assige arm in een specifieke volgorde naar drie coördinaten:
- (100, 150, 200)
- (75, 50, 100)
- (200, 75, 50)
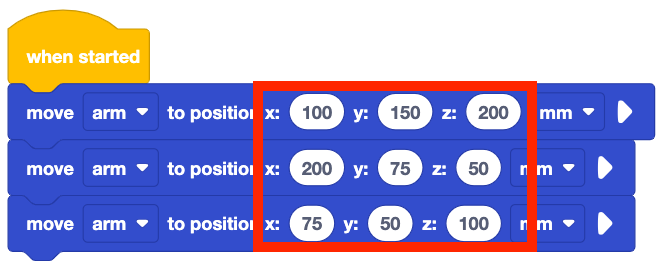
Door de blokken te verslepen, veranderen de opdrachten van volgorde. Het gedrag van de 6-assige arm verandert, aangezien deze nu in deze volgorde naar de coördinaten beweegt:
- (100, 150, 200)
- (200, 75, 50)
- (75, 50, 100)
In de onderstaande video beweegt de 6-assige arm in een specifieke volgorde naar de drie coördinaten wanneer het project wordt uitgevoerd, zoals weergegeven in het bovenstaande project. Het project wordt gestopt en de blokken worden opnieuw gerangschikt, zodat het derde blok tussen de eerste twee komt te staan. Wanneer het project opnieuw wordt uitgevoerd, verandert het gedrag van de 6-assige arm, aangezien deze naar de coördinaten in de nieuwe volgorde beweegt.
Activiteit
Nu u meer weet over robotgedrag en hoe dit gedrag verband houdt met specifieke opdrachten in VEXcode, kunt u deze vaardigheden oefenen door de verschillende gedragingen van de 6-assige arm in de onderstaande video te identificeren en deze te vergelijken met blokken. In de onderstaande videoclip begint de 6-assige arm in de veilige positie en beweegt vervolgens naar tegellocatie 32. Vervolgens beweegt het langs de onderste rij vakjes op de tegel naar de rechteronderhoek en vervolgens langs de rechterrij vakjes omhoog richting de signaaltoren.
- Bekijk eerst deze video over de 6-assige arm.
- Identificeer alle gedragingen die u ziet uitgevoerd door de 6-assige arm en de signaaltoren. Noteer ze in je technisch notitieboekje.
- Vergelijk uw lijst met gedragingen met die van uw groepsleden. Welk gedrag is bij u vergelijkbaar of verschillend?
- Vergelijk uw lijst met gedragingen met blokken in VEXcode. Welke blokkades horen bij de verschillende gedragingen die u hebt geïdentificeerd? Noteer deze in uw technisch notitieboekje.
Controleer uw begrip
Voordat u met de volgende les begint, moet u ervoor zorgen dat u de concepten in deze les begrijpt door de vragen in het onderstaande document in uw technische notitieboekje te beantwoorden.
Controleer uw begrip vragen > (Google Doc / .docx / .pdf)
Selecteer Volgende > om te leren hoe u de 6-assige arm kunt coderen zodat deze langs de x-as beweegt.