
Bài 2: Cơ bản về khoa học máy tính
Trong Bài học này, bạn sẽ tìm hiểu về những kiến thức cơ bản về khoa học máy tính bao gồm:
- Ngôn ngữ lập trình là gì?
- Hành vi của robot là gì?
- Làm thế nào để thay đổi hành vi của robot.
Vào cuối Bài học này, bạn sẽ áp dụng các kỹ năng đã học để xác định hành vi của Cánh tay robot 6 trục, chẳng hạn như những hành vi được thấy trong video bên dưới, cũng như các khối VEXcode tương ứng với từng hành vi. Trong đoạn video clip bên dưới, Cánh tay 6 trục bắt đầu ở vị trí an toàn, sau đó di chuyển để chạm vào vị trí Gạch 32. Sau đó, nó di chuyển dọc theo Tile và dừng lại ở vị trí Tile 36 và 36, ở góc dưới bên phải của Tile. Sau đó, cánh tay 6 trục di chuyển về phía Tháp tín hiệu, dừng lại ở vị trí Ngói 24 và dừng lại ở vị trí Ngói 12, bên cạnh Tháp tín hiệu đang nhấp nháy màu xanh lá cây trong khi dự án đang chạy.
Hiểu về ngôn ngữ lập trình
Ngôn ngữ lập trình là một tập hợp các quy tắc trong đó các ký hiệu biểu diễn các hành động. Ngôn ngữ lập trình tuân theo các hướng dẫn từng bước mà máy tính thực hiện để một dự án có thể chạy.
VEXcode là ngôn ngữ lập trình cho cánh tay 6 trục.
Hành vi của Robot
Hành vilà những hành động đã hoặc sẽ được thực hiện bởi robot. Di chuyển lên xuống dọc theo một trục, dừng lại và bật hoặc tắt đèn trên Tháp tín hiệu — đây đều là những hành vi. Hành vi được xác định bởi ngôn ngữ lập trình.
Để thay đổi hành vi của Cánh tay 6 trục, bạn có thể thay đổi các khối trong một dự án. Các khối lập trình này còn được gọi là lệnh. Bạn đã chỉnh sửa các lệnh trong Bài học trước khi thay đổi màu đèn của Tháp tín hiệu trong hoạt động này.
Bạn có thể tìm thấy tất cả các khối có thể sử dụng với Cánh tay 6 trục và Tháp tín hiệu trong Hộp công cụ ở phía bên trái của VEXcode.
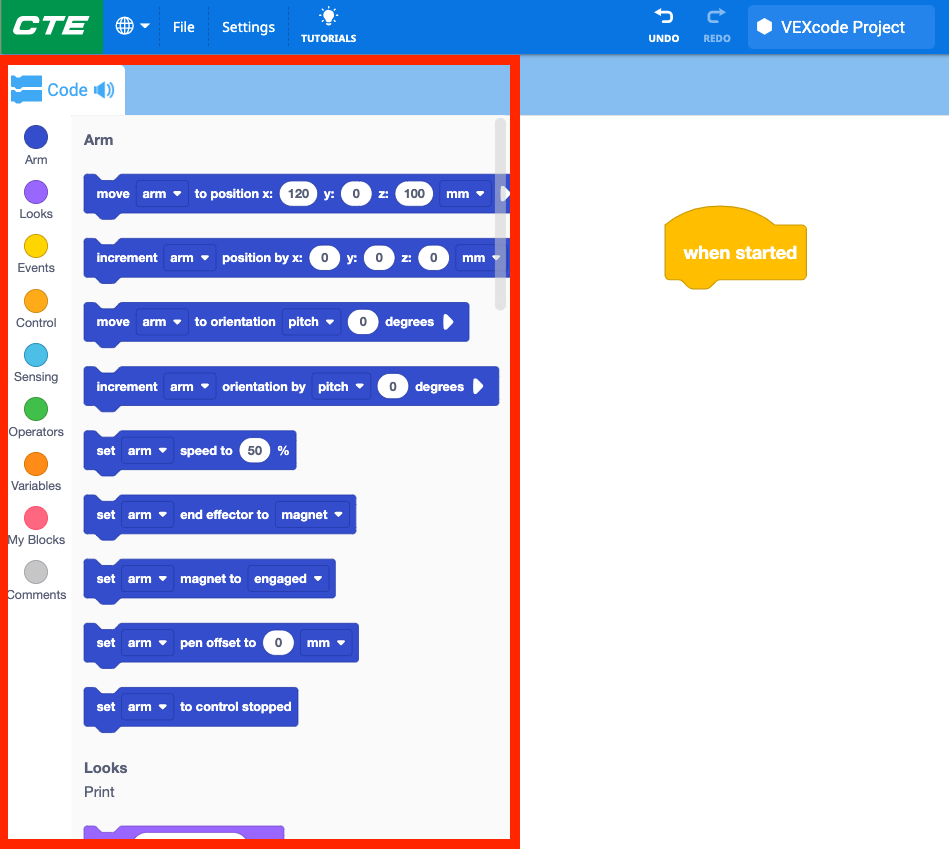
Bạn có thể truy cập danh sách lệnh đầy đủ bằng cách cuộn qua Hộp công cụ, như được hiển thị trong video này. Trong đoạn video clip, Hộp công cụ được cuộn qua để hiển thị các lệnh khác nhau có thể sử dụng trong một dự án.
Để bạn biết
Bạn có thể tìm hiểu thêm về bất kỳ khối nào bằng cách mở mục Trợ giúp. Phần Trợ giúp giải thích chức năng của khối và cách sử dụng khối đó trong một dự án. Để mở cửa sổ Trợ giúp, hãy chọn biểu tượng Trợ giúp, sau đó chọn khối bạn muốn tìm hiểu thêm, như được hiển thị trong video bên dưới. Trong đoạn video này, hãy chọn biểu tượng dấu chấm hỏi Trợ giúp ở phía bên phải của VEXcode, sau đó cửa sổ Trợ giúp sẽ mở ra. Tiếp theo, khối Set signal tower trong dự án được chọn và thông tin Trợ giúp sẽ hiển thị cho khối đó.
Sửa đổi hành vi của robot
Việc thay đổi các khối hoặc lệnh trong một dự án sẽ thay đổi hành vi của robot. Việc thay đổi các thông số, thêm, xóa hoặc sắp xếp các khối trong một dự án đều sẽ thay đổi hành vi của robot.
Thay đổi thông số
Tọa độ (x, y, z) trong các tham số của khối Di chuyển đến vị trí gây ra hành vi di chuyển đến tọa độ cụ thể đó. Việc sửa đổi các thông số trong khối sẽ thay đổi hành vi của robot bằng cách di chuyển Cánh tay 6 trục đến một vị trí khác.
Ví dụ, trong dự án này, hành vi của Cánh tay 6 trục là di chuyển đến tọa độ (100, 50, 100).

Thay đổi các tham số trong khối sẽ di chuyển Cánh tay 6 trục đến tọa độ (150, 150, 200). Đây là hành vi khác so với lệnh trước đó vì Cánh tay 6 trục di chuyển đến một vị trí khác.

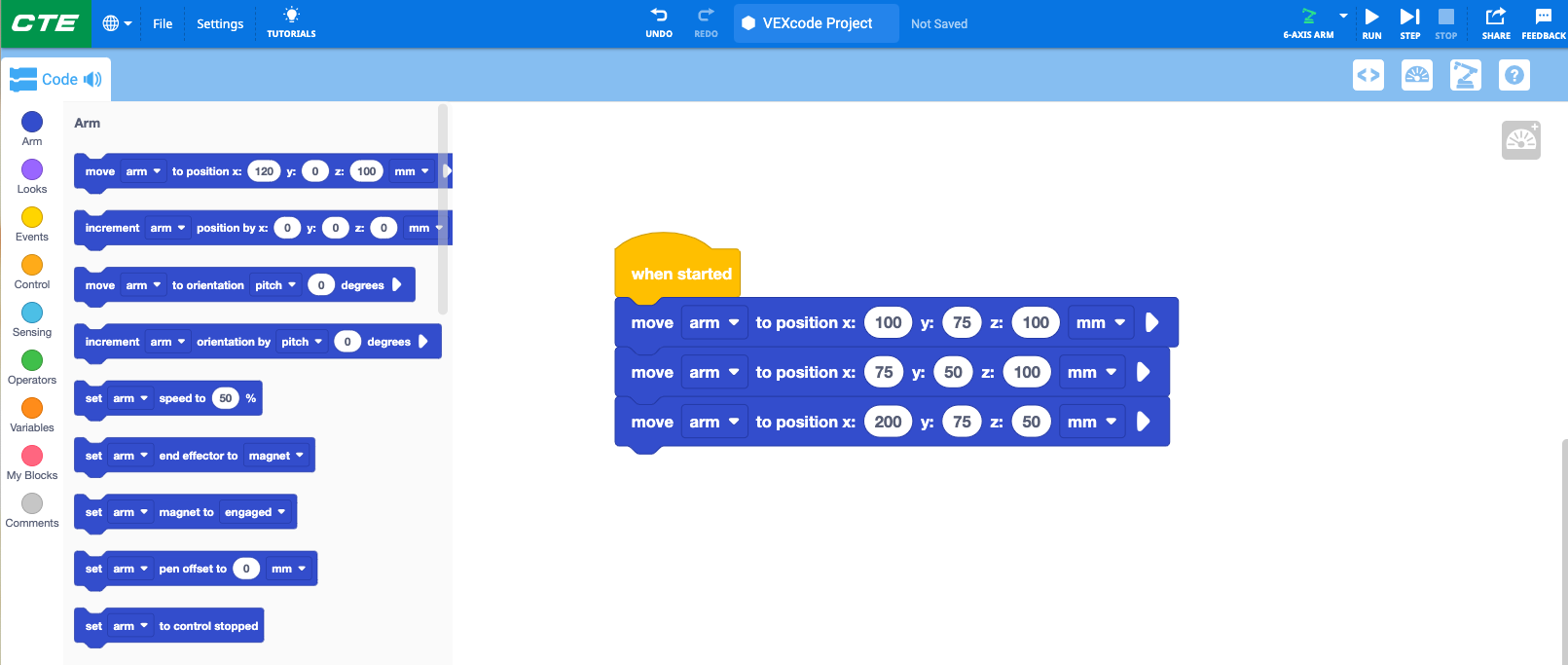
Trong video bên dưới, dự án được hiển thị bên phải sẽ di chuyển Cánh tay 6 trục đến tọa độ (100, 75, 100) khi dự án được chạy. Cánh tay 6 trục bắt đầu ở vị trí an toàn, sau đó di chuyển đến tọa độ đó và dự án dừng lại. Các tham số của khối Di chuyển đến vị trí sau đó được thay đổi thành (150, 150, 200). Khi dự án được chạy lần thứ hai, Cánh tay 6 trục sẽ di chuyển đến vị trí mới.
Để bạn biết
Như đã đề cập ở trên, lệnh là các khối lập trình trong VEXcode EXP được sử dụng để điều khiển hành vi của Cánh tay 6 trục.

Tham số là thông tin chi tiết của từng lệnh. Những mục này có thể bao gồm danh sách thả xuống hoặc các mục nhập khác. Trong khối được hiển thị ở đây, có nhiều tham số. Một cái để chọn thiết bị kết nối, một cái cho mỗi tọa độ trục và một cái để xác định đơn vị (milimét hoặc inch).

Sắp xếp lại các khối
Các khối trong ngăn xếp chạy từ trên xuống dưới, thực hiện từng hành vi theo thứ tự đó.
Việc sắp xếp lại các khối sẽ thay đổi hành vi của robot, khiến chúng thực hiện các hành vi theo thứ tự khác.
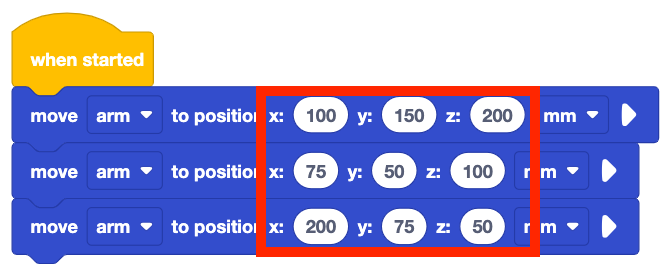
Trong ví dụ này, Cánh tay 6 trục sẽ di chuyển đến ba tọa độ theo thứ tự cụ thể:
- (100, 150, 200)
- (75, 50, 100)
- (200, 75, 50)
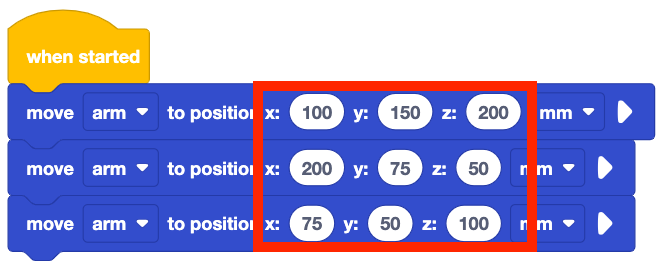
Bằng cách kéo các khối để sắp xếp lại, các lệnh sẽ được sắp xếp theo thứ tự khác. Hành vi của Cánh tay 6 trục sẽ thay đổi vì nó sẽ di chuyển đến các tọa độ theo thứ tự này:
- (100, 150, 200)
- (200, 75, 50)
- (75, 50, 100)
Trong video bên dưới, Cánh tay 6 trục di chuyển đến ba tọa độ theo thứ tự cụ thể khi dự án được chạy, như được hiển thị trong dự án ở trên. Dự án dừng lại và các khối được sắp xếp lại để di chuyển khối thứ ba vào giữa hai khối đầu tiên. Khi dự án được chạy lại, hành vi của Cánh tay 6 trục sẽ thay đổi khi nó di chuyển đến các tọa độ theo thứ tự mới.
Hoạt động
Bây giờ bạn đã tìm hiểu về hành vi của robot và cách hành vi liên quan đến các lệnh cụ thể trong VEXcode, bạn có thể luyện tập các kỹ năng này bằng cách xác định các hành vi khác nhau của Cánh tay 6 trục trong video bên dưới và cố gắng liên hệ chúng với các khối. Trong đoạn video clip bên dưới, Cánh tay 6 trục bắt đầu ở vị trí an toàn, sau đó di chuyển đến vị trí Ngói 32. Sau đó, nó di chuyển dọc theo hàng ô vuông dưới cùng trên Ngói đến góc dưới bên phải, rồi di chuyển lên trên dọc theo hàng ô vuông bên phải về phía Tháp tín hiệu.
- Bắt đầu bằng cách xem video này về Cánh tay 6 trục.
- Xác định tất cả các hành vi mà bạn thấy được thực hiện bởi Cánh tay 6 trục và Tháp tín hiệu. Ghi chúng vào sổ tay kỹ thuật của bạn.
- So sánh danh sách hành vi của bạn với các thành viên trong nhóm. Bạn có những hành vi nào giống hoặc khác nhau?
- So sánh danh sách hành vi của bạn với các khối trong VEXcode. Những khối nào phù hợp với từng hành vi bạn xác định? Ghi lại những điều này vào sổ tay kỹ thuật của bạn.
Kiểm tra sự hiểu biết của bạn
Trước khi bắt đầu Bài học tiếp theo, hãy đảm bảo rằng bạn hiểu các khái niệm trong Bài học này bằng cách trả lời các câu hỏi trong tài liệu bên dưới trong sổ tay kỹ thuật của bạn.
Kiểm tra câu hỏi hiểu biết của bạn > (Google Doc / .docx / .pdf)
Chọn Tiếp theo > để tìm hiểu cách lập trình Cánh tay 6 trục để di chuyển dọc theo trục x.