
Dans cette leçon, vous en apprendrez davantage sur les principes fondamentaux de l'informatique, notamment :
- Qu'est-ce qu'un langage de programmation.
- Qu'est-ce qu'un comportement de robot.
- Comment modifier les comportements des robots.
À la fin de cette leçon, vous appliquerez les compétences que vous avez acquises pour identifier les comportements du bras robotique à 6 axes, tels que ceux vus dans la vidéo ci-dessous, ainsi que les blocs VEXcode qui correspondent à chaque comportement.
Comprendre les langages de programmation
Un langage de programmation est un ensemble de règles dans lesquelles les symboles représentent des actions. Les langages de programmation suivent les instructions étape par étape qu'un ordinateur exécute pour qu'un projet s'exécute.
VEXcode est le langage de programmation pour le bras à 6 axes.
Comportements des robots
Les comportements sont les actions effectuées ou à effectuer par un robot. Se déplacer de haut en bas le long d'un axe, s'arrêter et allumer ou éteindre les lumières de la tour de signalisation — ce sont tous des comportements. Les comportements sont définis par le langage de programmation.
Pour modifier les comportements du bras à 6 axes, vous pouvez modifier les blocs dans un projet. Ces blocs de programmation sont également appelés commandes. Vous avez modifié les commandes de la leçon précédente lorsque vous avez changé la couleur des lumières de la tour de signalisation dans l'activité.
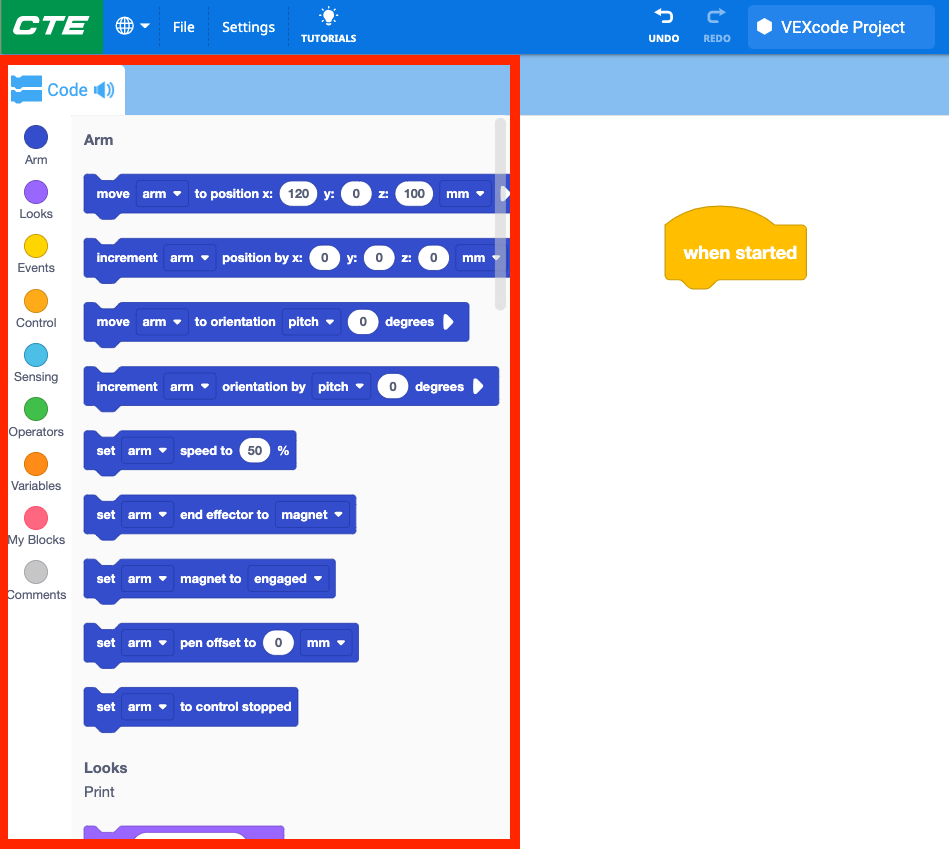
Vous pouvez trouver tous les blocs disponibles à utiliser avec le bras à 6 axes et la tour de signalisation dans la boîte à outils sur le côté gauche de VEXcode.
Vous pouvez accéder à la liste complète des commandes en faisant défiler la boîte à outils.
Pour votre information
Vous pouvez en savoir plus sur l'un des blocs en ouvrant l'aide. L'aide explique ce que fait un bloc et comment l'utiliser dans un projet. Pour ouvrir la fenêtre d'aide, sélectionnez l'icône Aide, puis sélectionnez le bloc sur lequel vous souhaitez en savoir plus.
Modification des comportements des robots
La modification des blocs ou des commandes d'un projet modifiera le comportement du robot. La modification des paramètres, l'ajout, la suppression ou la disposition des blocs dans un projet modifieront tous les comportements du robot.
Modification des paramètres
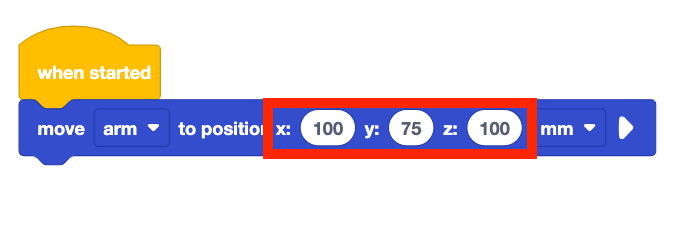
Les coordonnées (x, y, z) dans les paramètres du bloc Déplacer vers la position provoquent le comportement du déplacement vers cette coordonnée particulière. La modification des paramètres dans le bloc modifie le comportement du robot en déplaçant le bras à 6 axes vers un emplacement différent.
Par exemple, dans ce projet, le comportement du bras à 6 axes est de se déplacer vers la coordonnée (100, 50, 100).
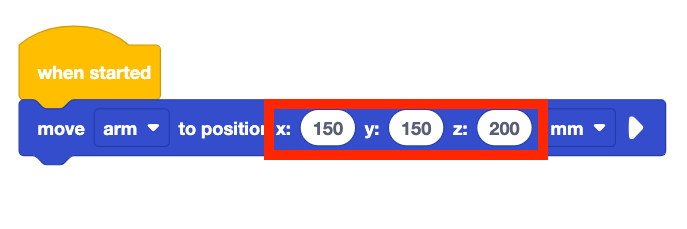
La modification des paramètres dans le bloc déplacera le bras à 6 axes vers la coordonnée (150, 150, 200). C'est un comportement différent de la commande précédente, car le bras à 6 axes se déplace vers un emplacement différent.
Dans cette vidéo, les comportements du bras à 6 axes sont de se déplacer vers la coordonnée (100, 75, 100) lorsque le projet est exécuté. Les paramètres du bloc Déplacer en position sont ensuite changés en (150, 150, 200). Lorsque le projet est exécuté une deuxième fois, le comportement du bras à 6 axes est de se déplacer vers l'emplacement différent.
Pour votre information
Comme mentionné ci-dessus, les commandes sont les blocs de programmation dans VEXcode EXP utilisés pour contrôler les comportements du bras à 6 axes.

Les paramètres sont les détails de chaque commande. Ceux-ci peuvent inclure des listes déroulantes ou d'autres entrées. Dans le bloc montré ici, il y a beaucoup de paramètres. Un pour choisir l'appareil auquel se connecter, un pour chacune des coordonnées de l'axe et un pour déterminer les unités (millimètres ou pouces).

Réorganisation des blocs
Les blocs d'une pile s'étendent de haut en bas, en effectuant chaque comportement dans cet ordre.
Réorganiser les blocs changera le comportement du robot, il effectue les comportements dans un ordre différent.
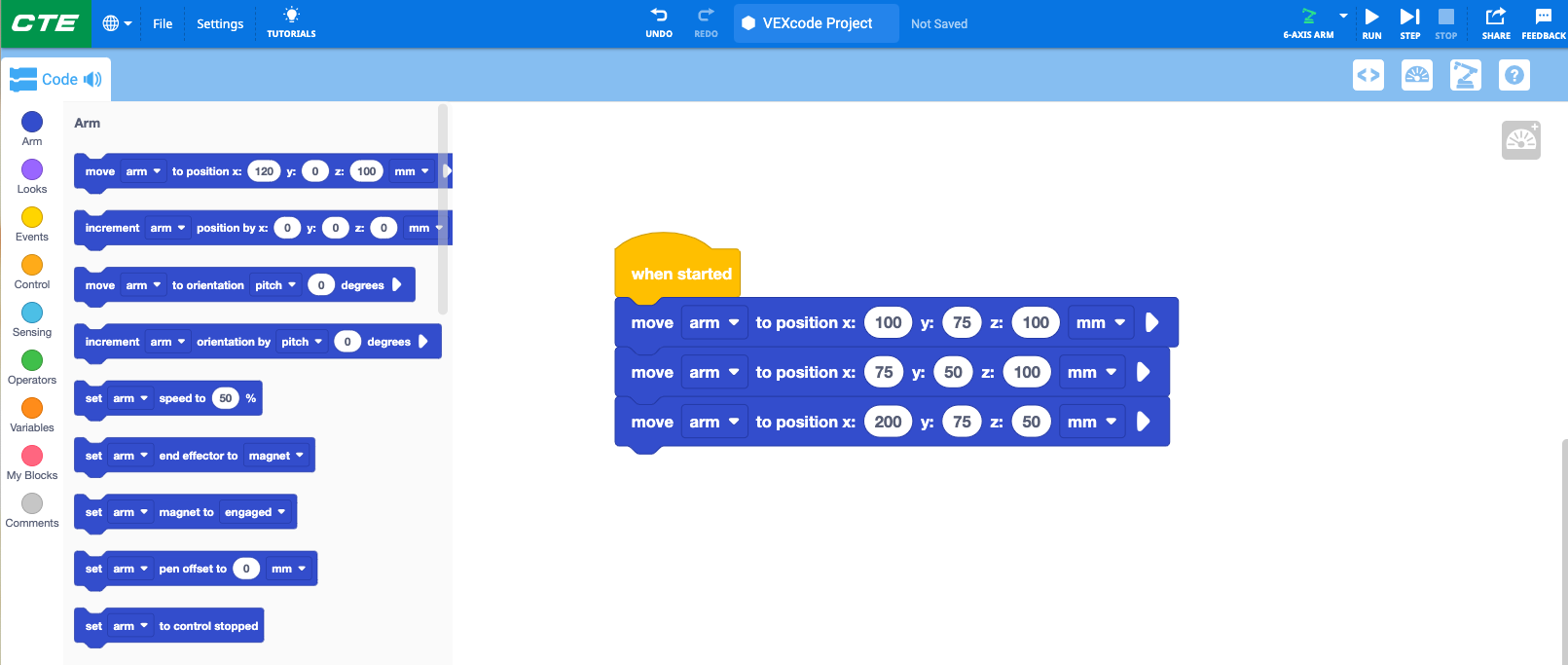
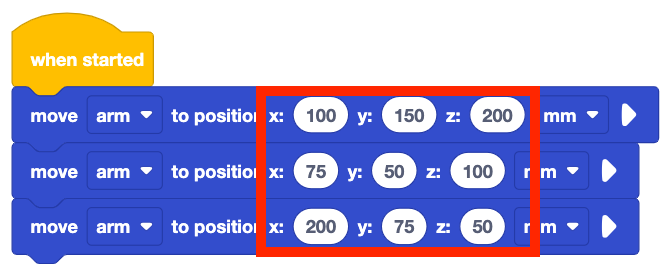
Dans cet exemple, le bras à 6 axes se déplacera vers trois coordonnées dans un ordre spécifique :
- (100, 150, 200)
- (75, 50, 100)
- (200, 75, 50)
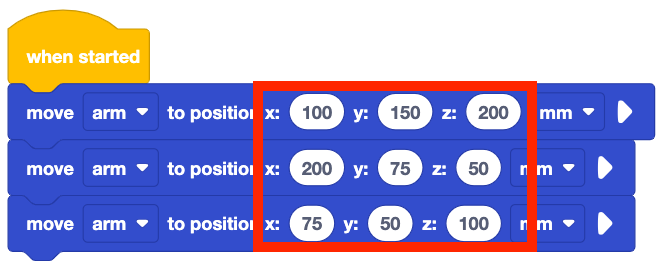
En faisant glisser les blocs pour les réorganiser, les commandes sont ensuite placées dans un ordre différent. Les comportements du bras à 6 axes vont changer, car il va maintenant se déplacer vers les coordonnées dans cet ordre :
- (100, 150, 200)
- (200, 75, 50)
- (75, 50, 100)
Dans cette vidéo, le bras à 6 axes se déplace vers les trois coordonnées dans un ordre spécifique lorsque le projet est exécuté, comme indiqué ci-dessus. Les blocs sont ensuite réarrangés. Lorsque le projet est exécuté à nouveau, le comportement du bras à 6 axes change, car il se déplace vers les coordonnées dans un ordre différent.
Activité
Maintenant que vous avez appris les comportements des robots et comment les comportements sont liés à des commandes spécifiques dans VEXcode, vous pouvez pratiquer ces compétences en identifiant les différents comportements du bras à 6 axes dans cette vidéo et en essayant de les assimiler à des blocs.
- Commencez par regarder cette vidéo du bras à 6 axes.
- Identifiez tous les comportements que vous voyez être effectués par le bras à 6 axes et la tour de signalisation. Enregistrez-les dans votre cahier d'ingénierie.
- Comparez votre liste de comportements avec les membres de votre groupe. Quels comportements avez-vous qui sont similaires ou différents les uns des autres ?
- Comparez votre liste de comportements avec les blocs dans VEXcode. Quels blocages vont avec chaque comportement que vous avez identifié ? Enregistrez-les dans votre cahier d'ingénierie.
Vérifiez votre compréhension
Avant de commencer la prochaine leçon, assurez-vous de comprendre les concepts de cette leçon en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez votre compréhension des questions > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour savoir comment coder le bras à 6 axes pour se déplacer le long de l'axe des x.