
In dieser Lektion lernen Sie die Grundlagen der Informatik kennen, einschließlich:
- Was ist eine Programmiersprache?
- Was ist ein Roboterverhalten?
- Wie man das Verhalten von Robotern ändert.
Am Ende dieser Lektion wenden Sie die Fähigkeiten an, die Sie gelernt haben, um die Verhaltensweisen des 6-Achsen-Roboterarms zu identifizieren, wie sie im Video unten zu sehen sind, sowie die VEXcode-Blöcke, die jedem Verhalten entsprechen.
Programmiersprachen verstehen
Eine Programmiersprache ist eine Reihe von Regeln, in denen Symbole Aktionen darstellen. Programmiersprachen folgen Schritt-für-Schritt-Anweisungen, die ein Computer ausführt, damit ein Projekt ausgeführt werden kann.
VEXcode ist die Programmiersprache für den 6-Achsen-Arm.
Roboterverhalten
Verhaltensweisen sind die von einem Roboter ausgeführten oder auszuführenden Handlungen. Sich entlang einer Achse auf und ab bewegen, anhalten und die Lichter am Signalturm ein- oder ausschalten — das sind alles Verhaltensweisen. Verhaltensweisen werden durch die Programmiersprache definiert.
Um das Verhalten des 6-Achsen-Arms zu ändern, können Sie die Blöcke in einem Projekt ändern. Diese Programmierblöcke werden auch Befehle genannt. Sie haben Befehle in der vorherigen Lektion bearbeitet, als Sie die Farbe der Lichter des Signalturms in der Aktivität geändert haben.
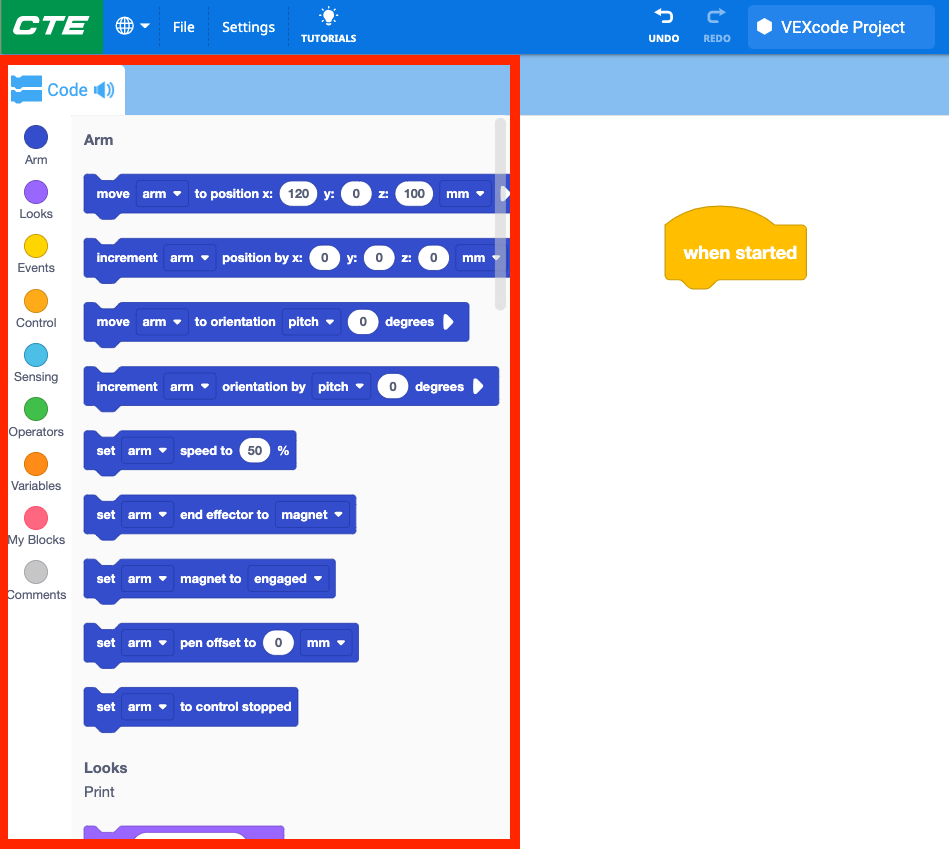
Alle Blöcke, die mit dem 6-Achsen-Arm und dem Signalturm verwendet werden können, finden Sie in der Toolbox auf der linken Seite von VEXcode.
Sie können auf die vollständige Liste der Befehle zugreifen, indem Sie durch die Toolbox scrollen.
Zur Kenntnisnahme
Sie können mehr über einen der Blöcke erfahren, indem Sie die Hilfe öffnen. In der Hilfe wird erklärt, was ein Block tut und wie man ihn in einem Projekt verwendet. Um das Hilfefenster zu öffnen, wählen Sie das Hilfesymbol und dann den Block, über den Sie mehr erfahren möchten.
Ändern des Roboterverhaltens
Das Ändern der Blöcke oder Befehle in einem Projekt ändert das Verhalten des Roboters. Das Ändern von Parametern, das Hinzufügen, Löschen oder Anordnen von Blöcken in einem Projekt ändert das Verhalten des Roboters.
Ändern von Parametern
Die (x, y, z) -Koordinaten in den Parametern des Blocks Bewegen zu Position verursachen das Verhalten beim Bewegen zu dieser bestimmten Koordinate. Das Ändern der Parameter im Block ändert das Verhalten des Roboters, indem der 6-Achsen-Arm an eine andere Stelle bewegt wird.
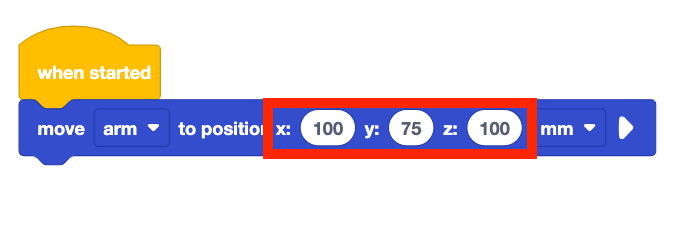
In diesem Projekt besteht das Verhalten des 6-Achsen-Arms beispielsweise darin, sich zur Koordinate (100, 50, 100) zu bewegen.
Wenn Sie die Parameter im Block ändern, wird der 6-Achsen-Arm auf die Koordinate (150, 150, 200) verschoben. Das ist ein anderes Verhalten als der vorherige Befehl, da sich der 6-Achsen-Arm an eine andere Stelle bewegt.
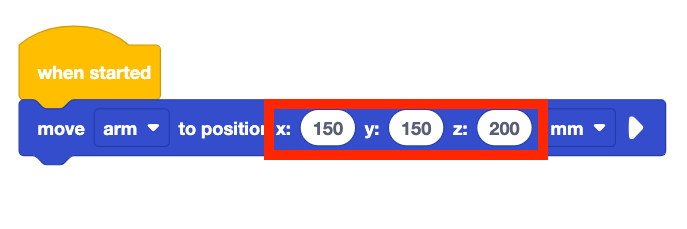
In diesem Video soll sich das Verhalten des 6-Achsen-Arms zur Koordinate (100, 75, 100) bewegen, wenn das Projekt ausgeführt wird. Die Parameter des Blocks Bewegen zu Position werden dann auf (150, 150, 200) geändert. Wenn das Projekt ein zweites Mal ausgeführt wird, besteht das Verhalten des 6-Achsen-Arms darin, sich an einen anderen Ort zu bewegen.
Zur Kenntnisnahme
Wie oben erwähnt, sind Befehle die Programmierblöcke in VEXcode EXP, die verwendet werden, um das Verhalten des 6-Achsen-Arms zu steuern.

Parameter sind die Details jedes Befehls. Dazu können Dropdown-Listen oder andere Eingaben gehören. In dem hier gezeigten Block gibt es viele Parameter. Eine, um das Gerät auszuwählen, mit dem eine Verbindung hergestellt werden soll, eine für jede der Achskoordinaten und eine, um die Einheiten (Millimeter oder Zoll) zu bestimmen.

Blöcke neu anordnen
Blöcke in einem Stapel laufen von oben nach unten und führen jedes Verhalten in dieser Reihenfolge aus.
Wenn Sie die Blöcke neu anordnen, ändert sich das Verhalten des Roboters, der die Verhaltensweisen in einer anderen Reihenfolge ausführt.
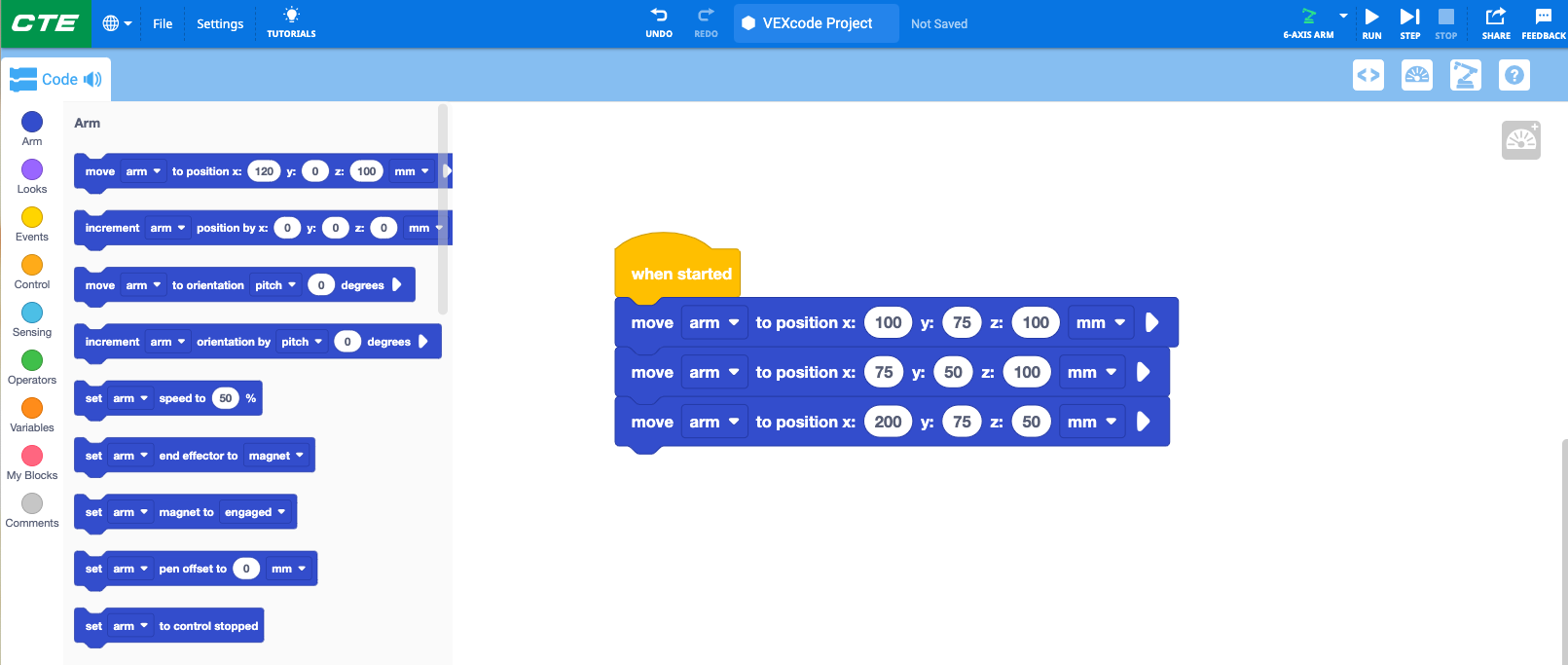
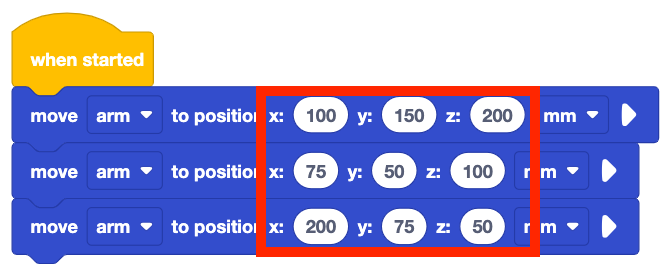
In diesem Beispiel bewegt sich der 6-Achsen-Arm in einer bestimmten Reihenfolge zu drei Koordinaten:
- (100, 150, 200)
- (75, 50, 100)
- (200, 75, 50)
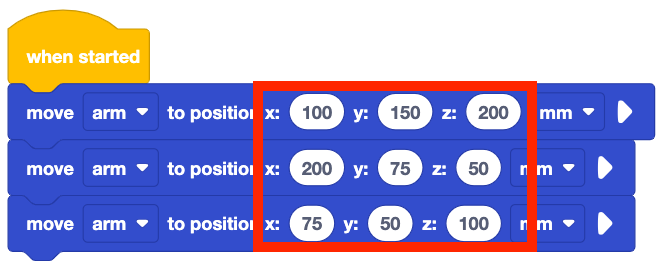
Durch Ziehen der Blöcke, um sie neu anzuordnen, werden die Befehle dann in eine andere Reihenfolge gebracht. Das Verhalten des 6-Achsen-Arms ändert sich, da er nun in dieser Reihenfolge zu den Koordinaten wechselt:
- (100, 150, 200)
- (200, 75, 50)
- (75, 50, 100)
In diesem Video bewegt sich der 6-Achsen-Arm zu den drei Koordinaten in einer bestimmten Reihenfolge, wenn das Projekt ausgeführt wird, wie oben gezeigt. Die Blöcke werden dann neu angeordnet. Wenn das Projekt erneut ausgeführt wird, ändert sich das Verhalten des 6-Achsen-Arms, da er sich in einer anderen Reihenfolge zu den Koordinaten bewegt.
Aktivität
Nachdem Sie nun mehr über das Verhalten von Robotern erfahren haben und wie sich Verhaltensweisen auf bestimmte Befehle in VEXcode beziehen, können Sie diese Fähigkeiten üben, indem Sie die verschiedenen Verhaltensweisen des 6-Achsen-Arms in diesem Video identifizieren und versuchen, sie mit Blöcken gleichzusetzen.
- Sehen Sie sich zunächst dieses Video des 6-Achsen-Arms an.
- Identifizieren Sie alle Verhaltensweisen, die Sie durch den 6-Achsen-Arm und den Signalturm ausführen sehen. Notieren Sie sie in Ihrem technischen Notizbuch.
- Vergleichen Sie Ihre Verhaltensliste mit Ihren Gruppenmitgliedern. Welche Verhaltensweisen haben Sie, die ähnlich oder voneinander verschieden sind?
- Vergleichen Sie Ihre Verhaltensliste mit Blöcken in VEXcode. Welche Blöcke passen zu jedem Verhalten, das Sie identifiziert haben? Notieren Sie diese in Ihrem technischen Notizbuch.
Überprüfe dein Verständnis
Bevor Sie mit der nächsten Lektion beginnen, stellen Sie sicher, dass Sie die Konzepte in dieser Lektion verstehen, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Fragen zum Verständnis prüfen > (Google Doc / .docx / .pdf)
Wählen Sie Weiter > , um zu erfahren, wie Sie den 6-Achsen-Arm so codieren, dass er sich entlang der x-Achse bewegt.