
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับพื้นฐานทางวิทยาศาสตร์คอมพิวเตอร์รวมถึง:
- ภาษาโปรแกรมคืออะไร
- พฤติกรรมของหุ่นยนต์คืออะไร
- วิธีปรับเปลี่ยนพฤติกรรมของหุ่นยนต์
ในตอนท้ายของบทเรียนนี้ท่านจะใช้ทักษะที่ได้เรียนรู้เพื่อระบุพฤติกรรมของแขนหุ่นยนต์ 6 แกนเช่นที่เห็นในวิดีโอด้านล่างเช่นเดียวกับบล็อก VEXcode ที่สอดคล้องกับแต่ละพฤติกรรม
ทำความเข้าใจภาษาการเขียนโปรแกรม
ภาษา โปรแกรม คือชุดของกฎที่มีสัญลักษณ์แสดงถึงการกระทำ ภาษาการเขียนโปรแกรมทำตามคำแนะนำทีละขั้นตอนที่คอมพิวเตอร์ดำเนินการเพื่อให้โปรเจกต์ทำงาน
VEXcode เป็นภาษาโปรแกรมสำหรับแขน 6 แกน
พฤติกรรมของหุ่นยนต์
พฤติกรรม คือการกระทำที่ดำเนินการหรือจะดำเนินการโดยหุ่นยนต์ การเลื่อนขึ้นและลงตามแกนหยุดและเปิดหรือปิดไฟบน Signal Tower — นี่คือพฤติกรรมทั้งหมด พฤติกรรมถูกกำหนดโดยภาษาโปรแกรม
ในการเปลี่ยนพฤติกรรมของแขน 6 แกนคุณสามารถเปลี่ยนบล็อกในโปรเจกต์ได้ บล็อกการเขียนโปรแกรมเหล่านี้เรียกอีกอย่างว่า คำสั่ง คุณแก้ไขคำสั่งในบทเรียนก่อนหน้านี้เมื่อคุณเปลี่ยนสีของไฟสัญญาณในกิจกรรม
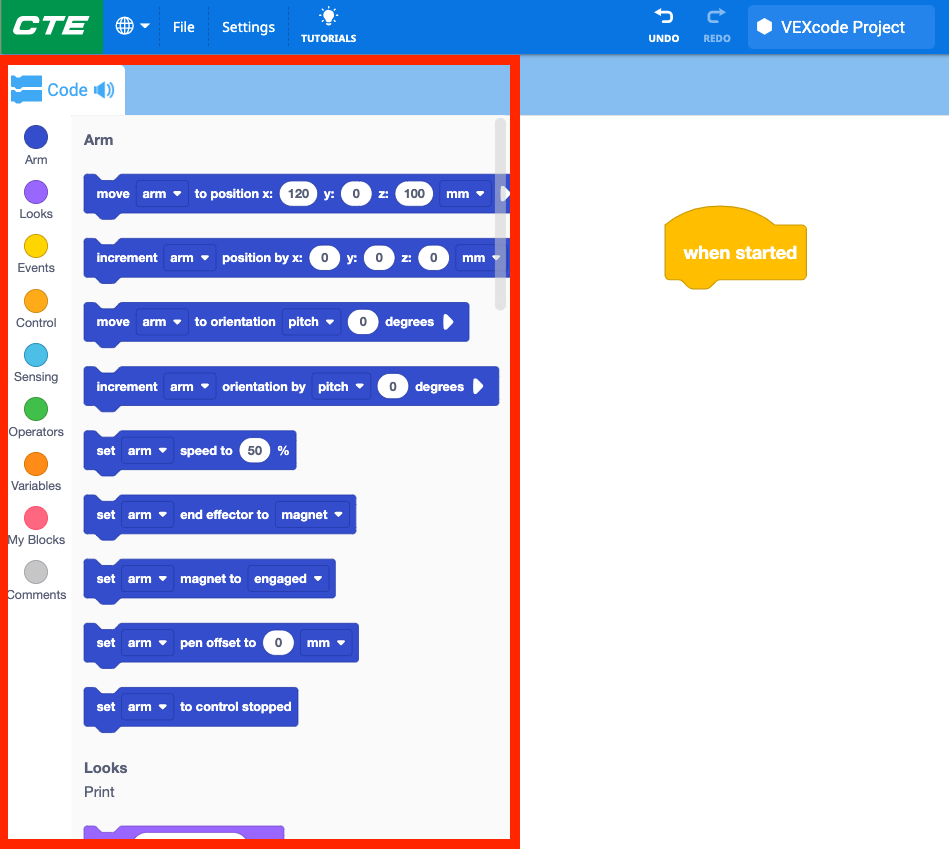
คุณสามารถค้นหาบล็อกทั้งหมดที่มีให้ใช้กับแขน 6 แกนและหอสัญญาณในกล่องเครื่องมือทางด้านซ้ายของ VEXcode
คุณสามารถเข้าถึงรายการคำสั่งทั้งหมดได้โดยเลื่อนผ่านกล่องเครื่องมือ
สำหรับข้อมูลของคุณ
ดูข้อมูลเพิ่มเติมเกี่ยวกับบล็อคใดก็ได้ได้โดยเปิดความช่วยเหลือ ความช่วยเหลือจะอธิบายสิ่งที่บล็อกทำและวิธีใช้ในโปรเจกต์ ในการเปิดหน้าต่างความช่วยเหลือให้เลือกไอคอนความช่วยเหลือจากนั้น เลือกบล็อกที่คุณต้องการเรียนรู้เพิ่มเติม
การปรับเปลี่ยนพฤติกรรมของหุ่นยนต์
การเปลี่ยนบล็อกหรือคำสั่งในโปรเจกต์จะเปลี่ยนพฤติกรรมของหุ่นยนต์ การปรับเปลี่ยนพารามิเตอร์การเพิ่มการลบหรือการจัดเรียงบล็อกในโครงการทั้งหมดจะปรับเปลี่ยนพฤติกรรมของหุ่นยนต์
การเปลี่ยนพารามิเตอร์
พิกัด (x, y, z) ในพารามิเตอร์ของ บล็อกการ ย้ายไปยังตำแหน่งทำให้เกิดพฤติกรรมในการย้ายไปยังพิกัดนั้น การปรับเปลี่ยนพารามิเตอร์ในบล็อกจะเปลี่ยนพฤติกรรมของหุ่นยนต์โดยการย้ายแขน 6 แกนไปยังตำแหน่งอื่น
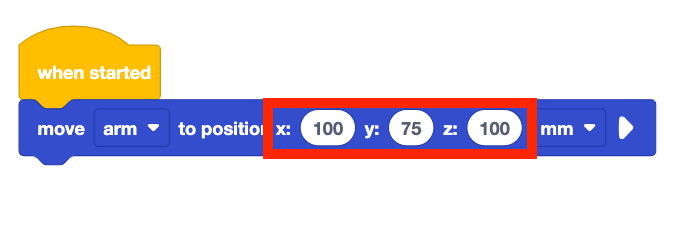
ตัวอย่างเช่นในโครงการนี้พฤติกรรมของแขน 6 แกนคือการย้ายไปยังพิกัด (100, 50, 100)
การเปลี่ยนพารามิเตอร์ในบล็อกจะย้ายแขน 6 แกนไปยังพิกัด (150, 150, 200) นั่นเป็นพฤติกรรมที่แตกต่างจากคำสั่งก่อนหน้าเนื่องจากแกนแขน 6 แกนย้ายไปยังตำแหน่งอื่น
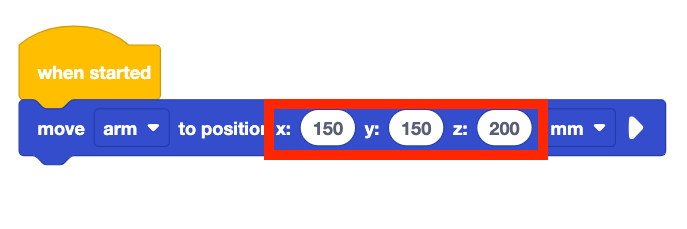
ในวิดีโอนี้พฤติกรรมของแขน 6 แกนคือการย้ายไปที่พิกัด (100, 75, 100) เมื่อดำเนินโครงการ พารามิเตอร์ของบล็อกการย้ายไปยังตำแหน่งจะถูกเปลี่ยนเป็น (150, 150, 200) เมื่อโครงการดำเนินการเป็นครั้งที่สองพฤติกรรมของแขน 6 แกนคือการย้ายไปยังตำแหน่งที่แตกต่างกัน
สำหรับข้อมูลของคุณ
ดังที่ได้กล่าวไว้ข้างต้นคำสั่งคือบล็อกการเขียนโปรแกรมใน VEXcode EXP ที่ใช้เพื่อควบคุมพฤติกรรมของแขน 6 แกน

พารามิเตอร์คือรายละเอียดของแต่ละคำสั่ง ซึ่งอาจรวมถึงดรอปดาวน์หรืออินพุตอื่นๆ ในบล็อกที่แสดงที่นี่มีพารามิเตอร์มากมาย หนึ่งเพื่อเลือกอุปกรณ์ที่จะเชื่อมต่อหนึ่งสำหรับแต่ละพิกัดแกนและหนึ่งเพื่อกำหนดหน่วย (มิลลิเมตรหรือนิ้ว)

การจัดเรียงบล็อกใหม่
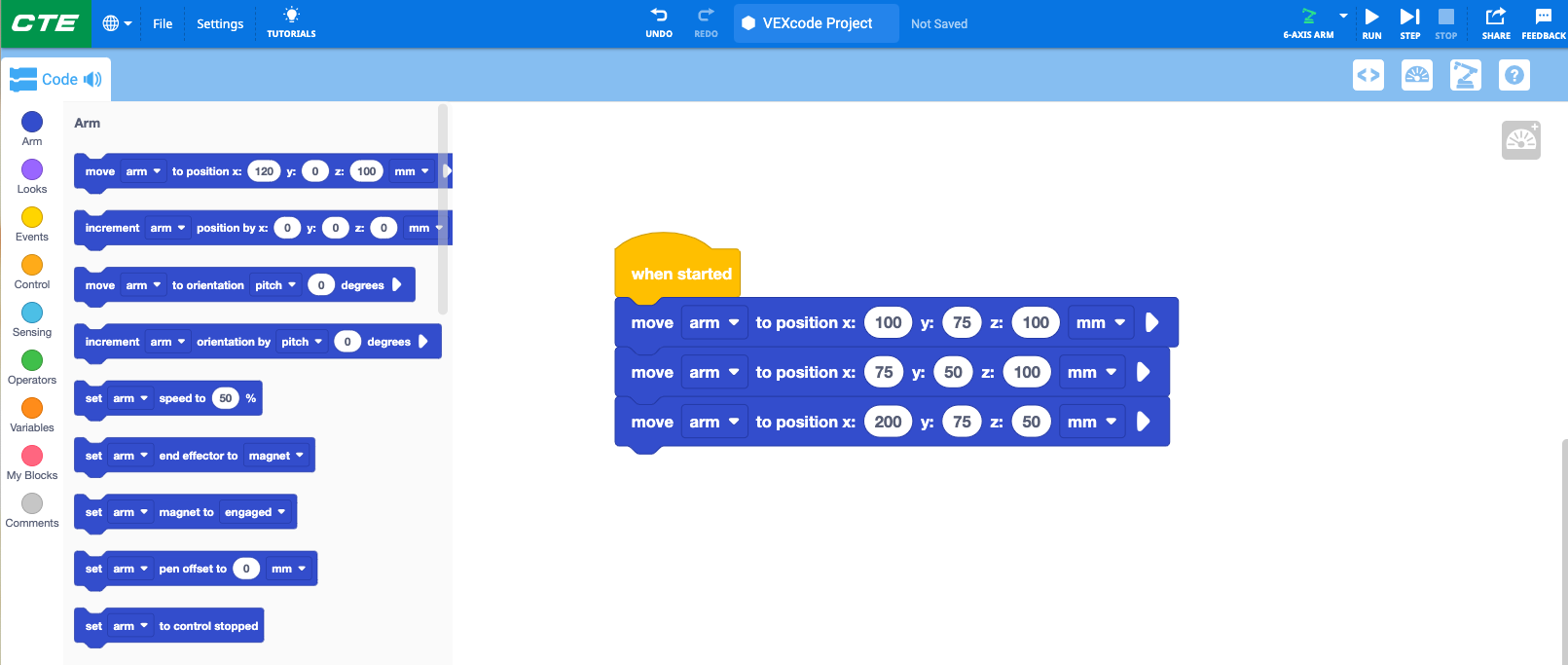
บล็อกในสแต็กที่วิ่งจากบนลงล่างโดยทำแต่ละพฤติกรรมตามลำดับนั้น
การจัดเรียงบล็อกใหม่จะเปลี่ยนพฤติกรรมของหุ่นยนต์ที่ทำงานตามลำดับที่แตกต่างกัน
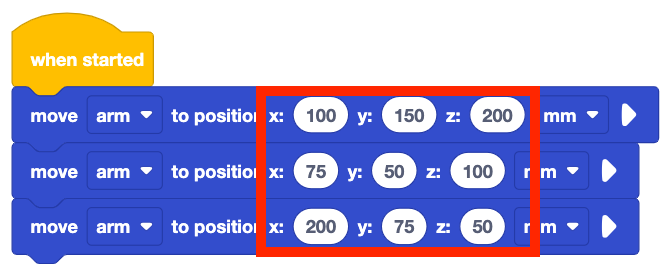
ในตัวอย่างนี้แขน 6 แกนจะย้ายไปยังสามพิกัดตามลำดับที่เฉพาะเจาะจง:
- 100, 150, 200
- 75, 50, 100
- 200, 75, 50
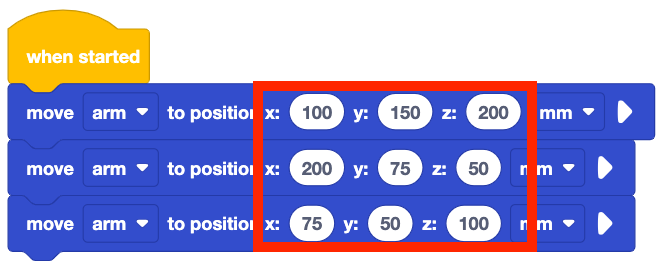
โดยการลากบล็อกเพื่อจัดเรียงใหม่คำสั่งจะถูกวางลงในลำดับที่แตกต่างกัน พฤติกรรมของแขน 6 แกนจะเปลี่ยนไปเนื่องจากตอนนี้มันจะย้ายไปยังพิกัดตามลำดับนี้:
- 100, 150, 200
- 200, 75, 50
- 75, 50, 100
ในวิดีโอนี้แขน 6 แกนจะเคลื่อนที่ไปยังพิกัดทั้งสามตามลำดับที่เฉพาะเจาะจงเมื่อดำเนินโครงการดังที่แสดงไว้ด้านบน จากนั้นบล็อกจะถูกจัดเรียงใหม่ เมื่อโครงการดำเนินการอีกครั้งพฤติกรรมของแขน 6 แกนจะเปลี่ยนไปเนื่องจากย้ายไปยังพิกัดในลำดับที่แตกต่างกัน
กิจกรรม
ตอนนี้คุณได้เรียนรู้เกี่ยวกับพฤติกรรมของหุ่นยนต์และพฤติกรรมที่เกี่ยวข้องกับคำสั่งเฉพาะใน VEXcode แล้วคุณสามารถฝึกฝนทักษะเหล่านี้ได้โดยการระบุพฤติกรรมที่แตกต่างกันของแขน 6 แกนในวิดีโอนี้และพยายามเทียบเคียงกับบล็อก
- เริ่มต้นด้วยการดูวิดีโอแขน 6 แกนนี้
- ระบุ พฤติกรรมทั้งหมดที่คุณเห็นว่ามีการดำเนินการโดยแขน 6 แกนและเสาสัญญาณ บันทึกลง ในสมุดบันทึกวิศวกรรมของคุณ
- เปรียบเทียบรายการพฤติกรรมของคุณกับสมาชิกกลุ่มของคุณ ท่านมีพฤติกรรมอะไรบ้างที่ คล้ายคลึงหรือแตกต่างจากคนอื่น?
- เปรียบเทียบรายการพฤติกรรมของคุณกับบล็อกใน VEXcode บล็อกใดที่ใช้กับพฤติกรรมแต่ละอย่างที่คุณระบุได้? บันทึกสิ่งเหล่านี้ลงในสมุดบันทึกวิศวกรรมของคุณ
ตรวจสอบความเข้าใจของคุณ
ก่อนเริ่มบทเรียนต่อไปตรวจสอบให้แน่ใจว่าท่านเข้าใจแนวคิดในบทเรียนนี้โดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของท่าน
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > ( Google Doc /.docx /.pdf)
เลือก ถัดไป > เพื่อเรียนรู้เกี่ยวกับวิธีเขียนรหัสแขน 6 แกนเพื่อเคลื่อนที่ไปตามแกน x