
Nesta lição, você aprenderá sobre os fundamentos da ciência da computação, incluindo:
- O que é uma linguagem de programação.
- O que é um comportamento de robô.
- Como modificar os comportamentos do robô.
Ao final desta Aula, você aplicará as habilidades que aprendeu para identificar os comportamentos do Braço Robótico de 6 Eixos, como os vistos no vídeo abaixo, bem como os blocos VEXcode que correspondem a cada comportamento.
Compreensão de Linguagens de Programação
Uma linguagem de programação é um conjunto de regras em que os símbolos representam ações. As linguagens de programação seguem as instruções passo a passo que um computador executa para que um projeto seja executado.
VEXcode é a linguagem de programação para o Braço de 6 Eixos.
Comportamentos do robô
Comportamentos são as ações realizadas ou a serem realizadas por um robô. Mover-se para cima e para baixo ao longo de um eixo, parar e acender ou apagar as luzes da Torre de Sinalização — estes são todos comportamentos. Os comportamentos são definidos pela linguagem de programação.
Para alterar os comportamentos do Braço de 6 eixos, você pode alterar os blocos de um projeto. Esses blocos de programação também são chamados de comandos. Você editou comandos na Lição anterior quando alterou a cor das luzes da Torre de Sinalização na atividade.
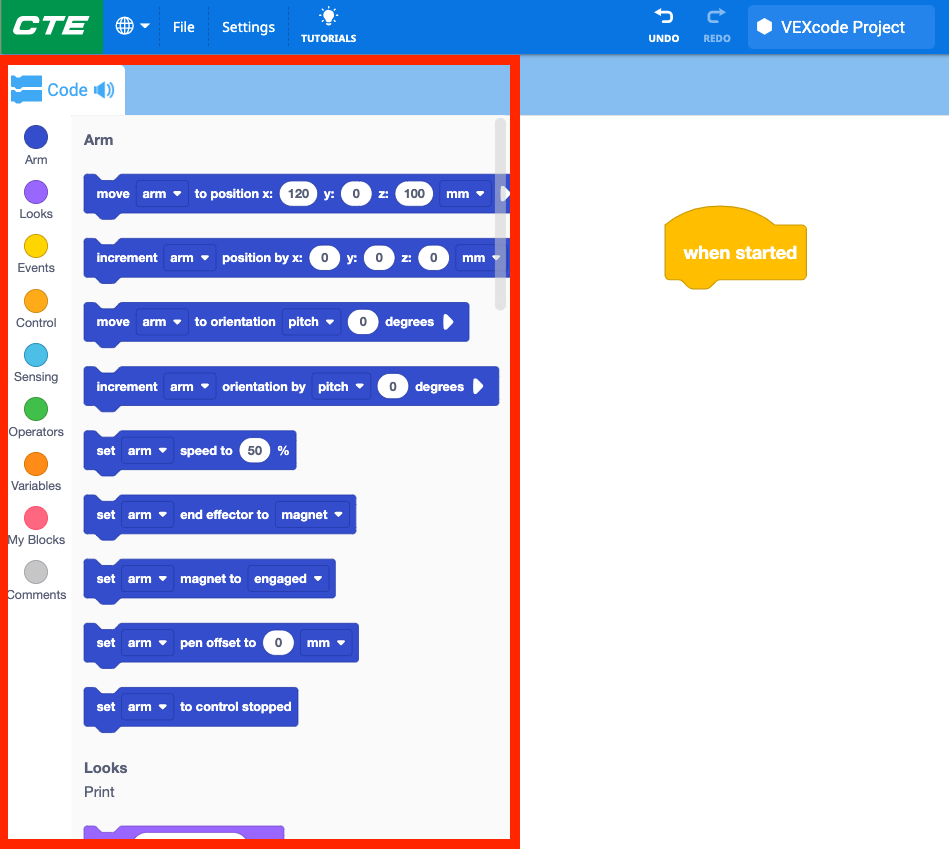
Você pode encontrar todos os blocos disponíveis para usar com o Braço de 6 Eixos e a Torre de Sinal na Caixa de Ferramentas no lado esquerdo do VEXcode.
Pode aceder à lista completa de comandos percorrendo a Caixa de Ferramentas.
Para sua informação
Pode saber mais sobre qualquer um dos blocos abrindo a Ajuda. A Ajuda explica o que um bloco faz e como usá-lo num projeto. Para abrir a janela de Ajuda, selecione o ícone de Ajuda e, em seguida, selecione o bloco sobre o qual deseja saber mais.
Modificação de Comportamentos de Robôs
Alterar os blocos, ou comandos, num projeto irá alterar o comportamento do robô. Modificar parâmetros, adicionar, excluir ou organizar blocos em um projeto modificará todos os comportamentos do robô.
Alteração de parâmetros
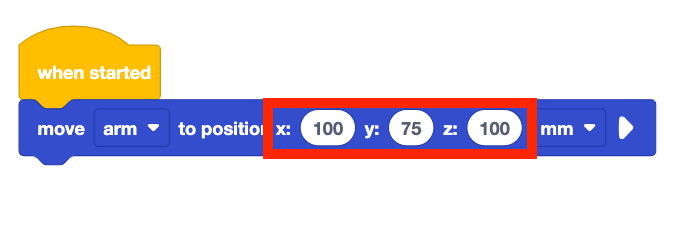
As coordenadas (x, y, z) nos parâmetros do bloco Mover para posição causam o comportamento de se mover para essa coordenada específica. Modificar os parâmetros no bloco altera o comportamento do robô movendo o braço de 6 eixos para um local diferente.
Por exemplo, neste projeto, o comportamento do Braço de 6 Eixos é mover para a coordenada (100, 50, 100).
Alterar os parâmetros no bloco moverá o braço de 6 eixos para a coordenada (150, 150, 200). Esse é um comportamento diferente do comando anterior, pois o Braço de 6 Eixos se move para um local diferente.
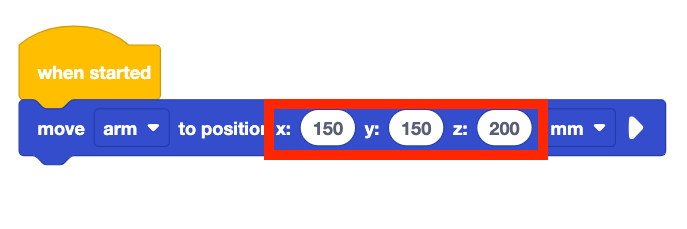
Neste vídeo, o comportamento do Braço de 6 Eixos é mover-se para a coordenada (100, 75, 100) quando o projeto é executado. Os parâmetros do bloco Mover para posição são então alterados para (150, 150, 200). Quando o projeto é executado uma segunda vez, o comportamento do Braço de 6 Eixos é mover-se para o local diferente.
Para sua informação
Como mencionado acima, os comandos são os blocos de programação no VEXcode EXP usados para controlar os comportamentos do Braço de 6 Eixos.

Os parâmetros são os detalhes de cada comando. Isso pode incluir menus suspensos ou outras entradas. No bloco mostrado aqui, existem muitos parâmetros. Um para escolher o dispositivo ao qual se conectar, um para cada uma das coordenadas do eixo e um para determinar as unidades (milímetros ou polegadas).

Reorganizar blocos
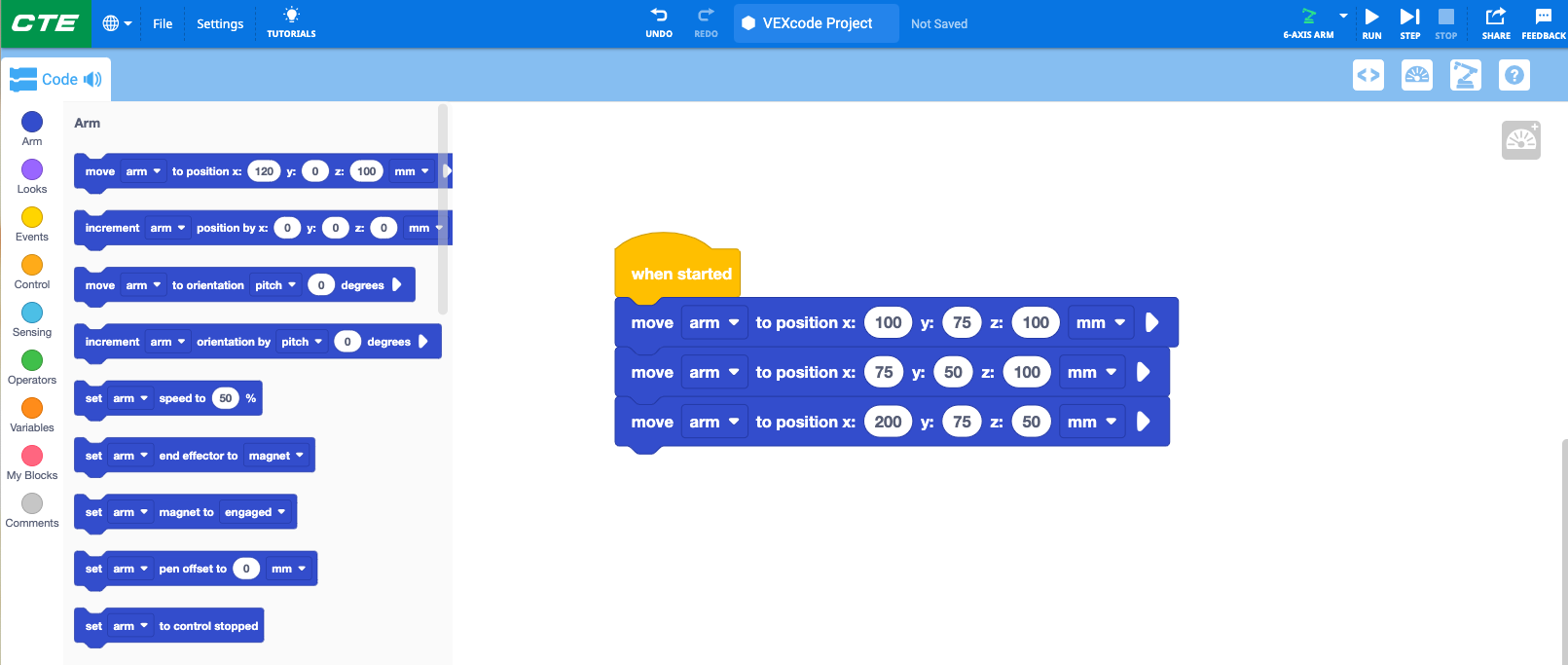
Os blocos de uma pilha são executados de cima para baixo, executando cada comportamento nessa ordem.
Reorganizar os blocos mudará o comportamento do robô, ele executa os comportamentos em uma ordem diferente.
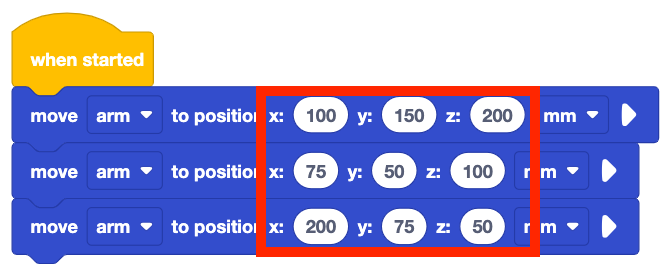
Neste exemplo, o Braço de 6 Eixos mover-se-á para três coordenadas numa ordem específica:
- (100, 150, 200)
- (75, 50, 100)
- (200, 75, 50)
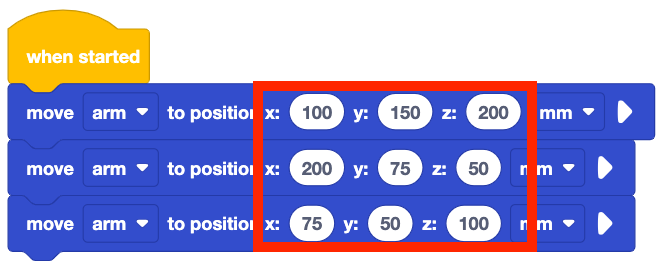
Ao arrastar os blocos para reorganizá-los, os comandos são colocados em uma ordem diferente. Os comportamentos do Braço de 6 Eixos mudarão, pois agora ele se moverá para as coordenadas nesta ordem:
- (100, 150, 200)
- (200, 75, 50)
- (75, 50, 100)
Neste vídeo, o Braço de 6 Eixos se move para as três coordenadas em uma ordem específica quando o projeto é executado, como mostrado acima. Os blocos são então reorganizados. Quando o projeto é executado novamente, o comportamento do Braço de 6 Eixos muda, à medida que se move para as coordenadas em uma ordem diferente.
Actividade
Agora que você aprendeu sobre os comportamentos do robô e como os comportamentos se relacionam com comandos específicos no VEXcode, você pode praticar essas habilidades identificando os diferentes comportamentos do Braço de 6 Eixos neste vídeo e tentando equipará-los a blocos.
- Comece por assistir a este vídeo do Braço de 6 Eixos.
- Identifique todos os comportamentos que você vê sendo realizados pelo Braço de 6 Eixos e pela Torre de Sinal. Grave-os no seu caderno de engenharia.
- Compare a sua lista de comportamentos com os membros do seu grupo. Quais comportamentos vocês têm que são semelhantes ou diferentes um do outro?
- Compare sua lista de comportamentos com blocos no VEXcode. Quais bloqueios acompanham cada comportamento que você identificou? Grave-os no seu caderno de engenharia.
Verifique a sua compreensão
Antes de iniciar a próxima lição, certifique-se de entender os conceitos desta lição respondendo às perguntas do documento abaixo em seu caderno de engenharia.
Verifique as suas perguntas de compreensão > (Google Doc / .docx / .pdf)
Selecione Avançar > para saber como codificar o Braço de 6 eixos para se mover ao longo do eixo x.