
Lekce 2: Základy informatiky
V této lekci se seznámíte se základy informatiky, včetně:
- Co je to programovací jazyk.
- Co je to chování robota.
- Jak upravit chování robotů.
Na konci této lekce aplikujete naučené dovednosti k identifikaci chování 6osého robotického ramene, jako je to vidět ve videu níže, a také bloků VEXcode, které odpovídají každému chování. Ve videoklipu níže se 6osé rameno začíná v bezpečné poloze a poté se přesune na místo s dlaždicí 32. Poté se pohybuje po dlaždici a zastaví se na místech 36 a 36 v pravém dolním rohu dlaždice. Šestiosé rameno se poté přesune směrem k signální věži, zastaví se na dlaždici 24 a zastaví se na dlaždici 12, vedle signální věže, která během běhu projektu bliká zeleně.
Porozumění programovacím jazykům
Programovací jazyk je sada pravidel, ve kterých symboly představují akce. Programovací jazyky se řídí podrobnými instrukcemi, které počítač provádí, aby projekt mohl běžet.
VEXcode je programovací jazyk pro 6osé rameno.
Chování robotů
Chováníjsou akce, které robot provádí nebo má provést. Pohyb nahoru a dolů podél osy, zastavení a zapínání a vypínání světel na signální věži – to vše jsou chování. Chování je definováno programovacím jazykem.
Chcete-li změnit chování 6osého ramene, můžete změnit bloky v projektu. Tyto programovací bloky se také nazývajípříkazy. V předchozí lekci jste upravili příkazy, když jste v cvičení změnili barvu světel signální věže.
Všechny bloky dostupné pro použití s 6osým ramenem a signální věží najdete v sadě nástrojů na levé straně VEXcode.
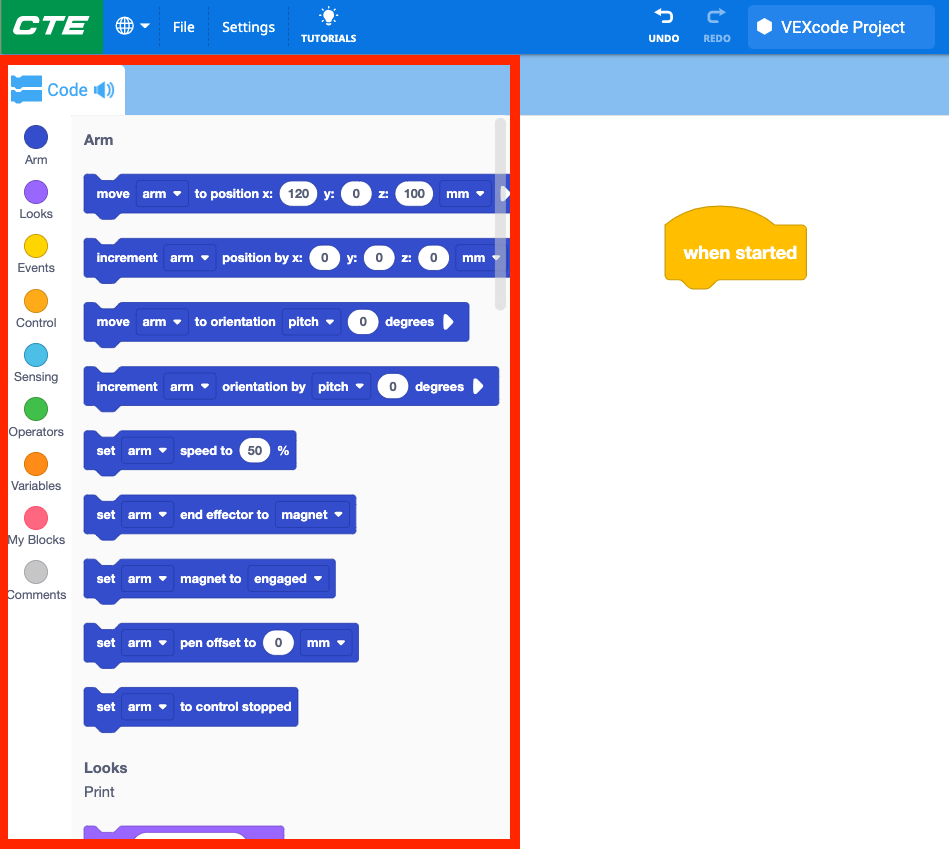
Úplný seznam příkazů zobrazíte procházením panelu nástrojů, jak je znázorněno v tomto videu. Ve videoklipu se panel nástrojů posouvá a zobrazuje různé příkazy dostupné pro použití v projektu.
Pro vaši informaci
Více informací o kterémkoli z bloků se dozvíte v nápovědě. Nápověda vysvětluje, k čemu blok slouží a jak ho použít v projektu. Chcete-li otevřít okno nápovědy, vyberte ikonu nápovědy a poté vyberte blok, o kterém se chcete dozvědět více, jak je znázorněno ve videu níže. V tomto videoklipu je vybrána ikona otazníku Nápověda zcela vpravo od VEXcode a poté se otevře okno Nápověda. Dále je v projektu vybrán blok Set signal tower a zobrazí se pro něj nápověda.
Úprava chování robotů
Změna bloků nebo příkazů v projektu změní chování robota. Úprava parametrů, přidávání, mazání nebo uspořádání bloků v projektu, to vše ovlivní chování robota.
Změna parametrů
Souřadnice (x, y, z) v parametrech bloku Move to position způsobují chování pohybu na tuto konkrétní souřadnici. Úpravou parametrů v bloku se změní chování robota přesunutím 6osého ramene na jiné místo.
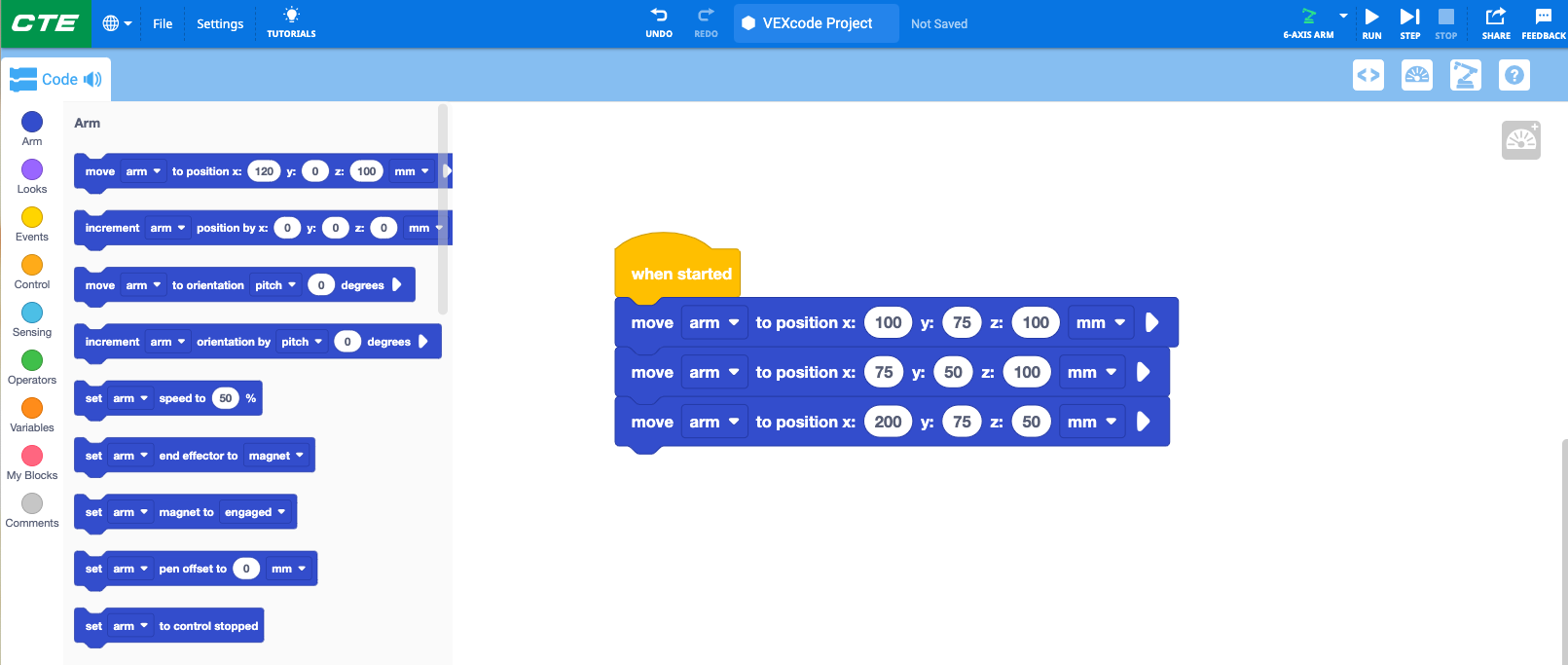
Například v tomto projektu se 6osé rameno chová tak, že se pohybuje na souřadnici (100, 50, 100).

Změna parametrů v bloku přesune 6osé rameno na souřadnici (150, 150, 200). To je jiné chování než u předchozího příkazu, protože se 6osé rameno přesune na jiné místo.

Ve videu níže zobrazený projekt vpravo po spuštění projektu přesune 6osé rameno na souřadnice (100, 75, 100). 6osé rameno začíná v bezpečné poloze, poté se přesune na tuto souřadnici a projekt se zastaví. Parametry bloku Move to position se poté změní na (150, 150, 200). Při druhém spuštění projektu se 6osé rameno přesune na nové místo.
Pro vaši informaci
Jak již bylo zmíněno výše, příkazy jsou programovací bloky ve VEXcode EXP používané k řízení chování 6osého ramene.

Parametry jsou detaily každého příkazu. Mohou to být rozbalovací nabídky nebo jiné vstupy. V zde zobrazeném bloku je mnoho parametrů. Jeden pro výběr zařízení, ke kterému se má připojit, jeden pro každou souřadnici osy a jeden pro určení jednotek (milimetry nebo palce).

Přeskupení bloků
Bloky v zásobníku běží shora dolů a provádějí jednotlivé funkce v tomto pořadí.
Změna uspořádání bloků změní chování robota, který bude provádět chování v jiném pořadí.
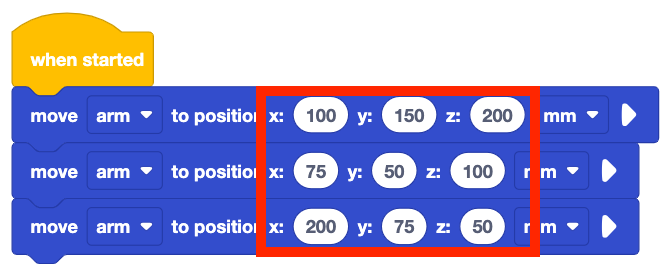
V tomto příkladu se 6osé rameno posune na tři souřadnice v určitém pořadí:
- (100, 150, 200)
- (75, 50, 100)
- (200, 75, 50)
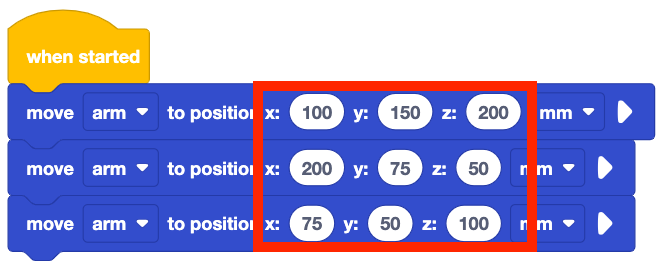
Přetažením bloků za účelem změny jejich uspořádání se pak příkazy umístí do jiného pořadí. Chování 6osého ramene se změní, protože se nyní bude pohybovat na souřadnice v tomto pořadí:
- (100, 150, 200)
- (200, 75, 50)
- (75, 50, 100)
Ve videu níže se 6osé rameno při spuštění projektu pohybuje na tři souřadnice v určitém pořadí, jak je znázorněno ve výše uvedeném projektu. Projekt je zastaven a bloky jsou poté přeskupeny tak, aby se třetí blok přesunul mezi první dva. Při opětovném spuštění projektu se chování 6osého ramene změní, protože se přesune na souřadnice v novém pořadí.
Aktivita
Nyní, když jste se dozvěděli o chování robotů a o tom, jak se chování vztahuje ke konkrétním příkazům ve VEXcode, můžete si tyto dovednosti procvičit identifikací různých chování 6osého ramene ve videu níže a pokusem o jejich přirovnání k blokům. Ve videoklipu níže se 6osé rameno začíná v bezpečné poloze a poté se přesune na pozici dlaždice 32. Poté se pohybuje podél spodní řady čtverců na dlaždici do pravého dolního rohu a poté se pohybuje nahoru podél pravé řady čtverců směrem k signální věži.
- Začněte sledováním tohoto videa o 6osém rameni.
- Identifikujte veškeré chování, které pozorujete u 6osého ramene a signální věže. Zaznamenejte si je do svého technického sešitu.
- Porovnejte svůj seznam chování s členy vaší skupiny. Jaké projevy chování máte, které jsou si podobné nebo odlišné?
- Porovnejte svůj seznam chování s bloky ve VEXcode. Jaké bloky patří ke každému chování, které jste identifikovali? Zaznamenejte si je do svého technického sešitu.
Ověřte si své znalosti
Než začnete s další lekci, ujistěte se, že rozumíte konceptům v této lekci, a to zodpovězením otázek v níže uvedeném dokumentu ve svém technickém sešitě.
Otázky k prověření vašich znalostí > (dokument Google / .docx / .pdf)
Vyberte Další > a dozvíte se, jak naprogramovat 6osé rameno pro pohyb podél osy x.