
En esta lección, aprenderá sobre los fundamentos de la informática, que incluyen:
- Qué es un lenguaje de programación.
- Qué es el comportamiento de un robot.
- Cómo modificar los comportamientos de los robots.
Al final de esta Lección, aplicarás las habilidades que aprendiste para identificar los comportamientos del Brazo Robótico de 6 Ejes, como los que se ven en el video a continuación, así como los bloques VEXcode que corresponden a cada comportamiento.
Comprensión de los lenguajes de programación
Un lenguaje de programación es un conjunto de reglas en las que los símbolos representan acciones. Los lenguajes de programación siguen instrucciones paso a paso que un ordenador ejecuta para que se ejecute un proyecto.
VEXcode es el lenguaje de programación para el brazo de 6 ejes.
Comportamientos de robots
Los comportamientos son las acciones realizadas o a realizar por un robot. Moverse hacia arriba y hacia abajo a lo largo de un eje, detenerse y encender o apagar las luces de la torre de señalización: todos estos son comportamientos. Los comportamientos están definidos por el lenguaje de programación.
Para cambiar los comportamientos del brazo de 6 ejes, puede cambiar los bloques en un proyecto. Estos bloques de programación también se llaman comandos. Editaste comandos en la lección anterior cuando cambiaste el color de las luces de la torre de señalización en la actividad.
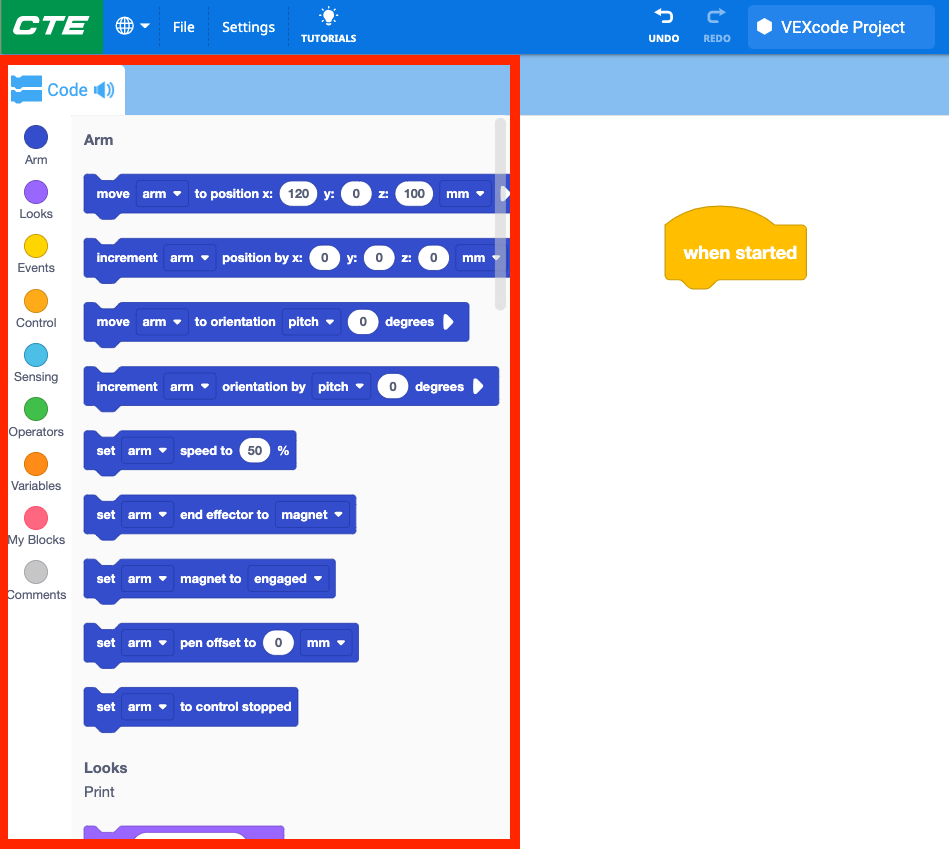
Puede encontrar todos los bloques disponibles para usar con el brazo de 6 ejes y la torre de señal en la caja de herramientas en el lado izquierdo de VEXcode.
Puede acceder a la lista completa de comandos desplazándose por el cuadro de herramientas.
Para su información
Puedes obtener más información sobre cualquiera de los bloques abriendo la Ayuda. La Ayuda explica qué hace un bloque y cómo usarlo en un proyecto. Para abrir la ventana de Ayuda, selecciona el icono de Ayuda y, a continuación, selecciona el bloque sobre el que quieres obtener más información.
Modificación de comportamientos de robots
Cambiar los bloques, o comandos, en un proyecto cambiará el comportamiento del robot. Modificar parámetros, añadir, eliminar u organizar bloques en un proyecto modificará el comportamiento del robot.
Cambio de parámetros
Las coordenadas (x, y, z) en los parámetros del bloque Mover a posición causan el comportamiento de moverse a esa coordenada en particular. La modificación de los parámetros en el bloque cambia el comportamiento del robot moviendo el brazo de 6 ejes a una ubicación diferente.
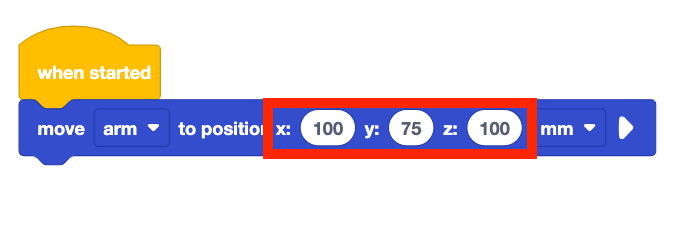
Por ejemplo, en este proyecto, el comportamiento del brazo de 6 ejes es moverse a la coordenada (100, 50, 100).
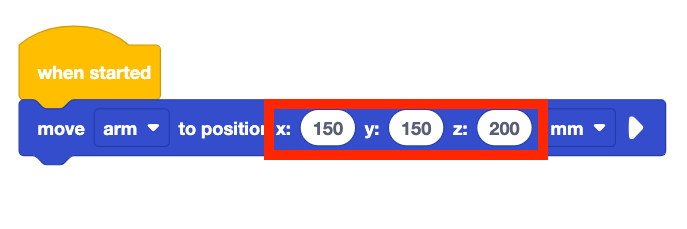
Al cambiar los parámetros en el bloque se moverá el brazo de 6 ejes a la coordenada (150, 150, 200). Ese es un comportamiento diferente al del comando anterior, ya que el brazo de 6 ejes se mueve a una ubicación diferente.
En este video, el comportamiento del brazo de 6 ejes es moverse a la coordenada (100, 75, 100) cuando se ejecuta el proyecto. Los parámetros del bloque Mover a posición se cambian a (150, 150, 200). Cuando el proyecto se ejecuta por segunda vez, el comportamiento del brazo de 6 ejes es moverse a la ubicación diferente.
Para su información
Como se mencionó anteriormente, los comandos son los bloques de programación en VEXCODE EXP utilizados para controlar los comportamientos del brazo de 6 ejes.

Los parámetros son los detalles de cada comando. Estos pueden incluir desplegables u otras entradas. En el bloque que se muestra aquí, hay muchos parámetros. Uno para elegir el dispositivo al que conectarse, uno para cada una de las coordenadas del eje y otro para determinar las unidades (milímetros o pulgadas).

Reorganización de bloques
Los bloques en una pila se ejecutan de arriba a abajo, realizando cada comportamiento en ese orden.
Reorganizar los bloques cambiará el comportamiento del robot, realiza los comportamientos en un orden diferente.
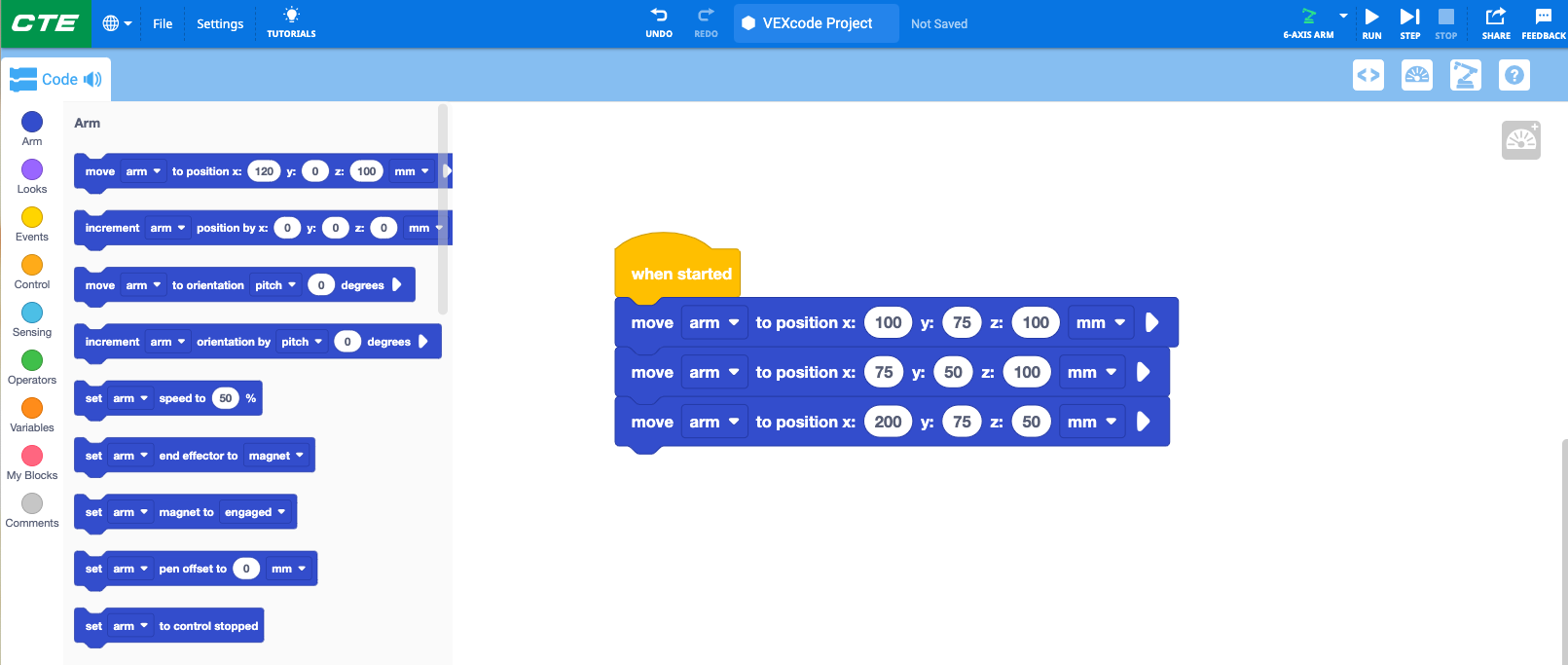
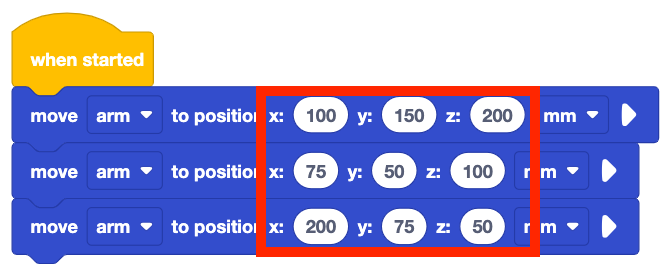
En este ejemplo, el brazo de 6 ejes se moverá a tres coordenadas en un orden específico:
- (100, 150, 200)
- (75, 50, 100)
- (200, 75, 50)
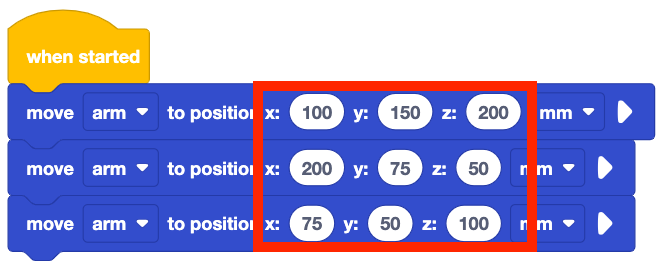
Al arrastrar los bloques para reorganizarlos, los comandos se colocan en un orden diferente. Los comportamientos del brazo de 6 ejes cambiarán, ya que ahora se moverá a las coordenadas en este orden:
- (100, 150, 200)
- (200, 75, 50)
- (75, 50, 100)
En este vídeo, el brazo de 6 ejes se mueve a las tres coordenadas en un orden específico cuando se ejecuta el proyecto, como se muestra arriba. A continuación, se reorganizan los bloques. Cuando el proyecto se ejecuta de nuevo, el comportamiento del brazo de 6 ejes cambia, ya que se mueve a las coordenadas en un orden diferente.
Actividad
Ahora que ha aprendido sobre los comportamientos de los robots y cómo los comportamientos se relacionan con comandos específicos en VEXcode, puede practicar estas habilidades identificando los diferentes comportamientos del brazo de 6 ejes en este video e intentando equipararlos a bloques.
- Comience viendo este vídeo del brazo de 6 ejes.
- Identifique todos los comportamientos que ve que realiza el brazo de 6 ejes y la torre de señales. Regístrelos en su cuaderno de ingeniería.
- Compare su lista de comportamientos con los miembros de su grupo. ¿Qué comportamientos tienen que son similares o diferentes entre sí?
- Compara tu lista de comportamientos con bloques en VEXcode. ¿Qué bloqueos van con cada comportamiento que identificó? Regístrelos en su cuaderno de ingeniería.
Compruebe su comprensión
Antes de comenzar la siguiente Lección, asegúrese de comprender los conceptos de esta Lección respondiendo las preguntas del siguiente documento en su cuaderno de ingeniería.
Verifique sus preguntas de comprensión > (Google Doc / .docx / .pdf)
Seleccione Siguiente > para obtener información sobre cómo codificar el brazo de 6 ejes para moverse a lo largo del eje x.