
পাঠ ২: কম্পিউটার বিজ্ঞানের মৌলিক বিষয়সমূহ
এই পাঠে, আপনি কম্পিউটার বিজ্ঞানের মৌলিক বিষয়গুলি সম্পর্কে শিখবেন যার মধ্যে রয়েছে:
- প্রোগ্রামিং ভাষা কী?
- রোবটের আচরণ কেমন।
- রোবটের আচরণ কীভাবে পরিবর্তন করা যায়।
এই পাঠের শেষে, আপনি 6-অ্যাক্সিস রোবোটিক আর্মের আচরণগুলি সনাক্ত করতে আপনার শেখা দক্ষতাগুলি প্রয়োগ করবেন, যেমনটি নীচের ভিডিওতে দেখা গেছে, এবং সেই সাথে প্রতিটি আচরণের সাথে সঙ্গতিপূর্ণ VEXcode ব্লকগুলিও। নিচের ভিডিও ক্লিপে, 6-অক্ষ বাহুটি নিরাপদ অবস্থানে শুরু হয়, তারপর টাইল অবস্থান 32 স্পর্শ করতে চলে যায়। এরপর এটি টাইলের পাশ দিয়ে চলে যায় এবং টাইলের নীচের ডান কোণে টাইলের অবস্থান 36 এবং 36 এ থেমে যায়। এরপর ৬-অক্ষ আর্মটি সিগন্যাল টাওয়ারের দিকে অগ্রসর হয়, টাইল অবস্থান ২৪-এ থেমে যায় এবং টাইল অবস্থান ১২-এ থামে, সিগন্যাল টাওয়ারের পাশে যা প্রকল্পটি চলাকালীন সবুজ আলোয় জ্বলজ্বল করে।
প্রোগ্রামিং ভাষা বোঝা
একটি প্রোগ্রামিং ভাষা হল এমন কিছু নিয়মের সেট যেখানে প্রতীকগুলি ক্রিয়াগুলিকে প্রতিনিধিত্ব করে। প্রোগ্রামিং ভাষাগুলি ধাপে ধাপে নির্দেশাবলী অনুসরণ করে যা একটি কম্পিউটার একটি প্রকল্প চালানোর জন্য কার্যকর করে।
VEXcode হল 6-Axis Arm-এর প্রোগ্রামিং ভাষা।

রোবট আচরণ
আচরণহলো রোবট কর্তৃক সম্পাদিত বা সম্পাদিত ক্রিয়া। একটি অক্ষ বরাবর উপরে-নিচে চলা, থামানো, এবং সিগন্যাল টাওয়ারের আলো জ্বালানো বা নিভিয়ে দেওয়া - এই সবই আচরণ। আচরণগুলি প্রোগ্রামিং ভাষা দ্বারা সংজ্ঞায়িত করা হয়।
6-অক্ষ বাহুর আচরণ পরিবর্তন করতে, আপনি একটি প্রকল্পের ব্লকগুলি পরিবর্তন করতে পারেন। এই প্রোগ্রামিং ব্লকগুলিকেকমান্ডও বলা হয়। আগের পাঠে যখন আপনি কার্যকলাপে সিগন্যাল টাওয়ারের আলোর রঙ পরিবর্তন করেছিলেন, তখন আপনি কমান্ডগুলি সম্পাদনা করেছিলেন।
VEXcode এর বাম দিকের টুলবক্সে আপনি 6-অ্যাক্সিস আর্ম এবং সিগন্যাল টাওয়ারের সাথে ব্যবহারের জন্য উপলব্ধ সমস্ত ব্লক খুঁজে পেতে পারেন।

এই ভিডিওতে দেখানো টুলবক্সের মাধ্যমে স্ক্রোল করে আপনি কমান্ডের সম্পূর্ণ তালিকা অ্যাক্সেস করতে পারেন। ভিডিও ক্লিপে, টুলবক্সটি স্ক্রোল করে দেখানো হয়েছে যাতে একটি প্রকল্পে ব্যবহারের জন্য উপলব্ধ বিভিন্ন কমান্ড দেখানো হয়।
আপনার জ্ঞাতার্থে
আপনি সাহায্য খুলে যেকোনো ব্লক সম্পর্কে আরও জানতে পারবেন। সাহায্যটি ব্যাখ্যা করে যে একটি ব্লক কী করে এবং একটি প্রকল্পে এটি কীভাবে ব্যবহার করতে হয়। সাহায্য উইন্ডো খুলতে, সাহায্য আইকনটি নির্বাচন করুন, তারপর আপনি যে ব্লকটি সম্পর্কে আরও জানতে চান তা নির্বাচন করুন, যেমনটি নীচের ভিডিওতে দেখানো হয়েছে। এই ভিডিও ক্লিপে, VEXcode-এর একেবারে ডানদিকে প্রশ্নবোধক চিহ্ন "সহায়তা" আইকনটি নির্বাচন করা হয়েছে, তারপর সহায়তা উইন্ডোটি খোলে। এরপর, প্রকল্পের সেট সিগন্যাল টাওয়ার ব্লকটি নির্বাচন করা হয় এবং সেই ব্লকের জন্য সাহায্য তথ্য দেখানো হয়।
রোবটের আচরণ পরিবর্তন করা
একটি প্রকল্পে ব্লক বা কমান্ড পরিবর্তন করলে রোবটের আচরণ পরিবর্তন হবে। কোনও প্রকল্পে প্যারামিটার পরিবর্তন, ব্লক যোগ, মুছে ফেলা বা সাজানো - এই সবকিছুই রোবটের আচরণ পরিবর্তন করবে।
পরামিতি পরিবর্তন করা হচ্ছে
ব্লকের প্যারামিটারে (x, y, z) স্থানাঙ্কগুলি অবস্থান এ সরান, সেই নির্দিষ্ট স্থানাঙ্কে সরানোর আচরণের কারণ হয়। ব্লকের প্যারামিটারগুলি পরিবর্তন করলে 6-অক্ষ আর্মটিকে অন্য স্থানে সরিয়ে রোবটের আচরণ পরিবর্তন হয়।
উদাহরণস্বরূপ, এই প্রকল্পে, 6-অক্ষ বাহুর আচরণ হল স্থানাঙ্কে (100, 50, 100) সরানো।
ব্লকের প্যারামিটার পরিবর্তন করলে ৬-অক্ষ বাহু স্থানাঙ্কে (১৫০, ১৫০, ২০০) সরে যাবে। এটি পূর্ববর্তী কমান্ডের চেয়ে ভিন্ন আচরণ, কারণ 6-অক্ষ আর্মটি একটি ভিন্ন স্থানে চলে যায়।
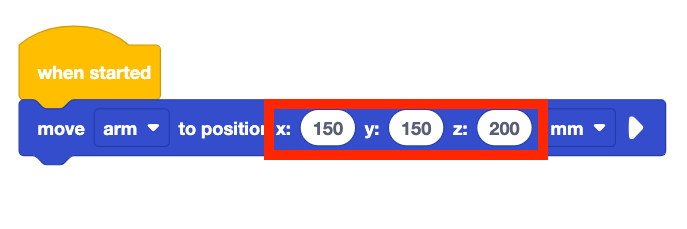
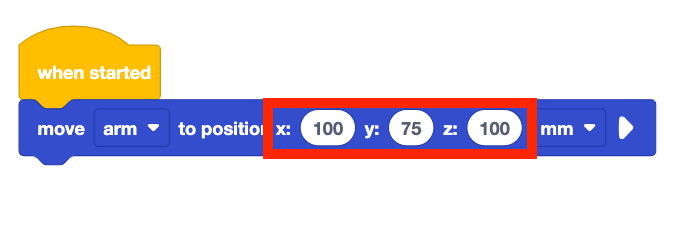
নিচের ভিডিওতে, ডানদিকে দেখানো প্রকল্পটি প্রকল্পটি চালানোর সময় 6-অক্ষ আর্মকে স্থানাঙ্কে (100, 75, 100) স্থানান্তর করবে। ৬-অক্ষ বাহুটি নিরাপদ অবস্থানে শুরু হয়, তারপর সেই স্থানাঙ্কে চলে যায় এবং প্রকল্পটি বন্ধ হয়ে যায়। ব্লকের প্যারামিটারগুলি পজিশন এ পরিবর্তন করা হয় (150, 150, 200)। যখন প্রকল্পটি দ্বিতীয়বার চালানো হয়, তখন 6-অক্ষ আর্মটি নতুন স্থানে চলে যায়।
আপনার জ্ঞাতার্থে
উপরে উল্লিখিত হিসাবে, কমান্ড হল VEXcode EXP-এর প্রোগ্রামিং ব্লক যা 6-অ্যাক্সিস আর্মের আচরণ নিয়ন্ত্রণ করতে ব্যবহৃত হয়।

প্যারামিটার হল প্রতিটি কমান্ডের বিবরণ। এর মধ্যে ড্রপ ডাউন বা অন্যান্য ইনপুট অন্তর্ভুক্ত থাকতে পারে। এখানে দেখানো ব্লকে, অনেকগুলি প্যারামিটার রয়েছে। সংযোগ স্থাপনের জন্য ডিভাইসটি বেছে নেওয়ার জন্য একটি, প্রতিটি অক্ষ স্থানাঙ্কের জন্য একটি এবং একক (মিলিমিটার বা ইঞ্চি) নির্ধারণের জন্য একটি।

ব্লক পুনর্বিন্যাস
একটি স্ট্যাকের ব্লকগুলি উপর থেকে নীচে চলে, প্রতিটি আচরণ সেই ক্রমে সম্পাদন করে।
ব্লকগুলো পুনর্বিন্যাস করলে রোবটের আচরণ বদলে যাবে, এটি ভিন্ন ক্রমে আচরণ সম্পাদন করবে।
এই উদাহরণে, 6-অক্ষ আর্ম একটি নির্দিষ্ট ক্রমে তিনটি স্থানাঙ্কে স্থানান্তরিত হবে:
- (১০০, ১৫০, ২০০)
- (৭৫, ৫০, ১০০)
- (২০০, ৭৫, ৫০)

ব্লকগুলিকে টেনে এনে পুনরায় সাজানোর মাধ্যমে, কমান্ডগুলিকে একটি ভিন্ন ক্রমে স্থাপন করা হয়। ৬-অক্ষ বাহুর আচরণ পরিবর্তন হবে, কারণ এটি এখন এই ক্রমে স্থানাঙ্কে স্থানান্তরিত হবে:
- (১০০, ১৫০, ২০০)
- (২০০, ৭৫, ৫০)
- (৭৫, ৫০, ১০০)

নিচের ভিডিওতে, প্রকল্পটি চালানোর সময় 6-অক্ষ আর্মটি একটি নির্দিষ্ট ক্রমে তিনটি স্থানাঙ্কে চলে যায়, যেমনটি উপরের প্রকল্পে দেখানো হয়েছে। প্রকল্পটি বন্ধ করে দেওয়া হয়, এবং তারপর ব্লকগুলিকে পুনর্বিন্যাস করা হয়, যাতে প্রথম দুটি ব্লকের মধ্যে তৃতীয় ব্লকটি সরানো যায়। যখন প্রকল্পটি আবার চালানো হয়, তখন 6-অক্ষ আর্মের আচরণ পরিবর্তিত হয়, কারণ এটি নতুন ক্রমে স্থানাঙ্কগুলিতে চলে যায়।
কার্যকলাপ
এখন যেহেতু আপনি VEXcode-এ রোবটের আচরণ এবং নির্দিষ্ট কমান্ডের সাথে আচরণ কীভাবে সম্পর্কিত তা সম্পর্কে শিখেছেন, আপনি নীচের ভিডিওতে 6-অক্ষ বাহুর বিভিন্ন আচরণ চিহ্নিত করে এবং সেগুলিকে ব্লকের সাথে সমীকরণ করার চেষ্টা করে এই দক্ষতাগুলি অনুশীলন করতে পারেন। নিচের ভিডিও ক্লিপে, 6-অক্ষ আর্মটি নিরাপদ অবস্থানে শুরু হয়, তারপর টাইল অবস্থান 32-এ চলে যায়। এরপর এটি টাইলের বর্গক্ষেত্রের নীচের সারি বরাবর নীচের ডান কোণে চলে যায়, তারপর ডান পাশের বর্গক্ষেত্রের সারি বরাবর সিগন্যাল টাওয়ারের দিকে উপরের দিকে চলে যায়।
- ৬-অ্যাক্সিস আর্মের এই ভিডিওটি দেখে শুরু করুন।
- ৬-অক্ষ আর্ম এবং সিগন্যাল টাওয়ার দ্বারা সম্পাদিত সমস্ত আচরণ চিহ্নিত করুন। তোমার ইঞ্জিনিয়ারিং নোটবুকে এগুলো লিখে রাখো।
- তোমার আচরণের তালিকা তোমার দলের সদস্যদের সাথে তুলনা করো। তোমাদের মধ্যে কোন আচরণগুলো একই রকম বা ভিন্ন?
- VEXcode-এর ব্লকের সাথে আপনার আচরণের তালিকার তুলনা করুন। আপনার চিহ্নিত প্রতিটি আচরণের সাথে কোন ব্লকগুলি যায়? এগুলো তোমার ইঞ্জিনিয়ারিং নোটবুকে লিপিবদ্ধ করো।
তোমার বোধগম্যতা পরীক্ষা করো
পরবর্তী পাঠ শুরু করার আগে, আপনার ইঞ্জিনিয়ারিং নোটবুকে নীচের নথিতে থাকা প্রশ্নগুলির উত্তর দিয়ে নিশ্চিত করুন যে আপনি এই পাঠের ধারণাগুলি বুঝতে পেরেছেন।
আপনার বোঝার প্রশ্নগুলি পরীক্ষা করুন > (Google Doc / .docx / .pdf)
6-অক্ষ বাহুকে x-অক্ষ বরাবর সরানোর জন্য কীভাবে কোড করতে হয় তা জানতে পরবর্তী > নির্বাচন করুন।