
In questa lezione, imparerai i fondamenti dell'informatica, tra cui:
- Che cos' è un linguaggio di programmazione.
- Cos' è il comportamento di un robot.
- Come modificare i comportamenti dei robot.
Al termine di questa lezione, applicherai le abilità apprese per identificare i comportamenti del braccio robotico a 6 assi, come quelli visti nel video qui sotto, nonché i blocchi VEXcode che corrispondono a ciascun comportamento.
Comprensione dei linguaggi di programmazione
Un linguaggio di programmazione è un insieme di regole in cui i simboli rappresentano azioni. I linguaggi di programmazione seguono le istruzioni passo-passo che un computer esegue per l'esecuzione di un progetto.
VEXcode è il linguaggio di programmazione per il braccio a 6 assi.
Comportamenti del robot
I comportamenti sono le azioni eseguite o che devono essere eseguite da un robot. Spostarsi su e giù lungo un asse, fermarsi e accendere o spegnere le luci sulla Signal Tower: questi sono tutti comportamenti. I comportamenti sono definiti dal linguaggio di programmazione.
Per modificare i comportamenti del braccio a 6 assi, è possibile modificare i blocchi in un progetto. Questi blocchi di programmazione sono anche chiamati comandi. Hai modificato i comandi nella lezione precedente quando hai cambiato il colore delle luci della Signal Tower nell'attività.
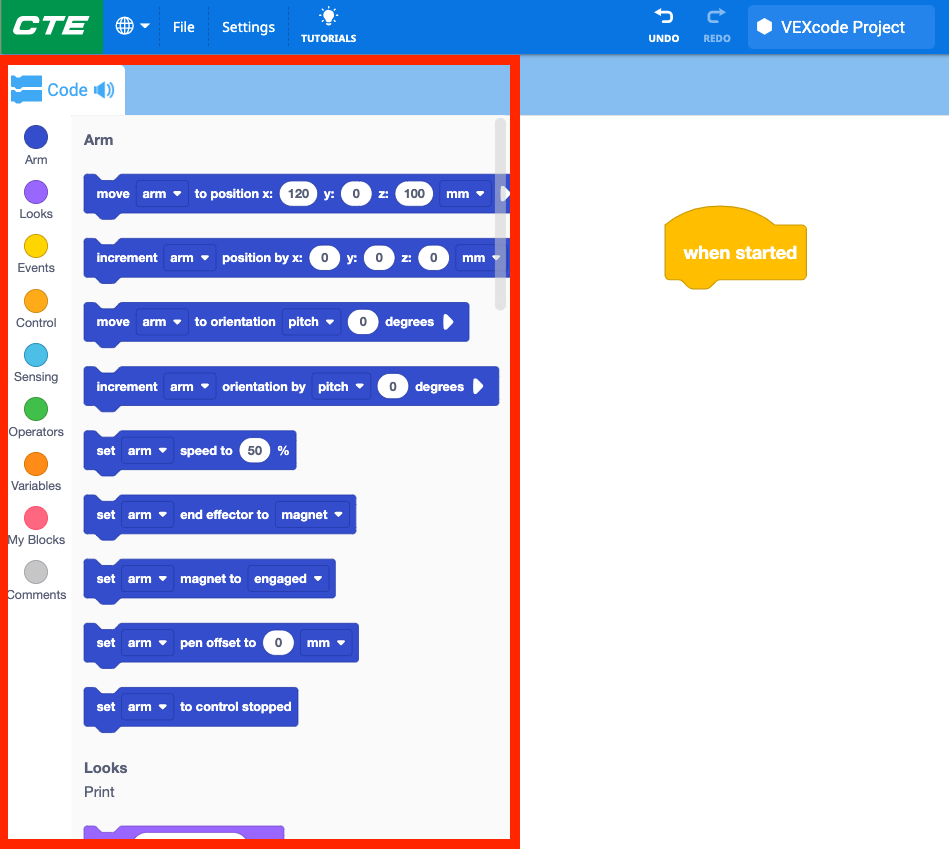
Puoi trovare tutti i blocchi disponibili da utilizzare con il braccio a 6 assi e la torre di segnalazione nella casella degli strumenti sul lato sinistro di VEXcode.
È possibile accedere all'elenco completo dei comandi scorrendo la casella degli strumenti.
Per tua informazione
Puoi saperne di più su uno qualsiasi dei blocchi aprendo la Guida. La Guida spiega cosa fa un blocco e come utilizzarlo in un progetto. Per aprire la finestra della Guida, seleziona l'icona Guida, quindi seleziona il blocco di cui desideri saperne di più.
Modificare i comportamenti del robot
La modifica dei blocchi, o comandi, in un progetto cambierà il comportamento del robot. La modifica dei parametri, l'aggiunta, l'eliminazione o la disposizione dei blocchi in un progetto modificheranno tutti i comportamenti del robot.
Modifica dei parametri
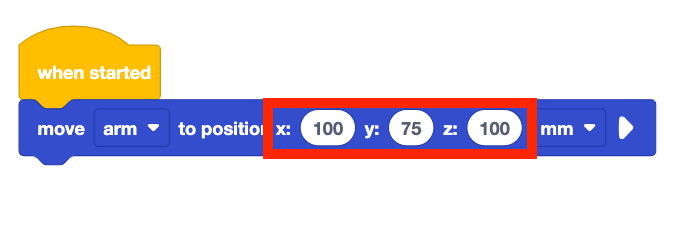
Le coordinate (x, y, z) nei parametri del blocco Sposta in posizione causano il comportamento di spostamento in quella particolare coordinata. La modifica dei parametri nel blocco modifica il comportamento del robot spostando il braccio a 6 assi in una posizione diversa.
Ad esempio, in questo progetto, il comportamento del braccio a 6 assi è quello di spostarsi sulla coordinata (100, 50, 100).
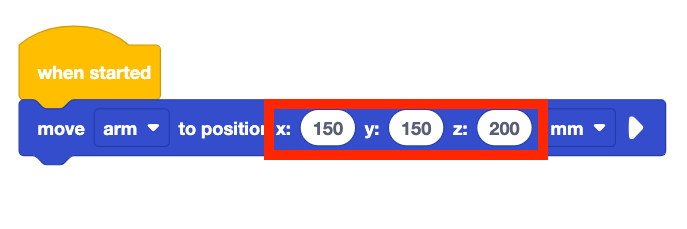
La modifica dei parametri nel blocco sposterà il braccio a 6 assi sulla coordinata (150, 150, 200). Questo è un comportamento diverso rispetto al comando precedente, poiché il braccio a 6 assi si sposta in una posizione diversa.
In questo video, il comportamento del braccio a 6 assi è quello di spostarsi sulla coordinata (100, 75, 100) quando viene eseguito il progetto. I parametri del blocco Sposta in posizione vengono quindi modificati in (150, 150, 200). Quando il progetto viene eseguito una seconda volta, il comportamento del braccio a 6 assi è quello di spostarsi in una posizione diversa.
Per tua informazione
Come accennato in precedenza, i comandi sono i blocchi di programmazione in VEXCODE EXP utilizzati per controllare i comportamenti del braccio a 6 assi.

I parametri sono i dettagli di ciascun comando. Questi possono includere menu a discesa o altri input. Nel blocco mostrato qui, ci sono molti parametri. Uno per scegliere il dispositivo a cui connettersi, uno per ciascuna delle coordinate dell'asse e uno per determinare le unità (millimetri o pollici).

Riordino blocchi
I blocchi in una pila vengono eseguiti dall'alto verso il basso, eseguendo ogni comportamento in quell' ordine.
Riorganizzando i blocchi cambierà il comportamento del robot che esegue i comportamenti in un ordine diverso.
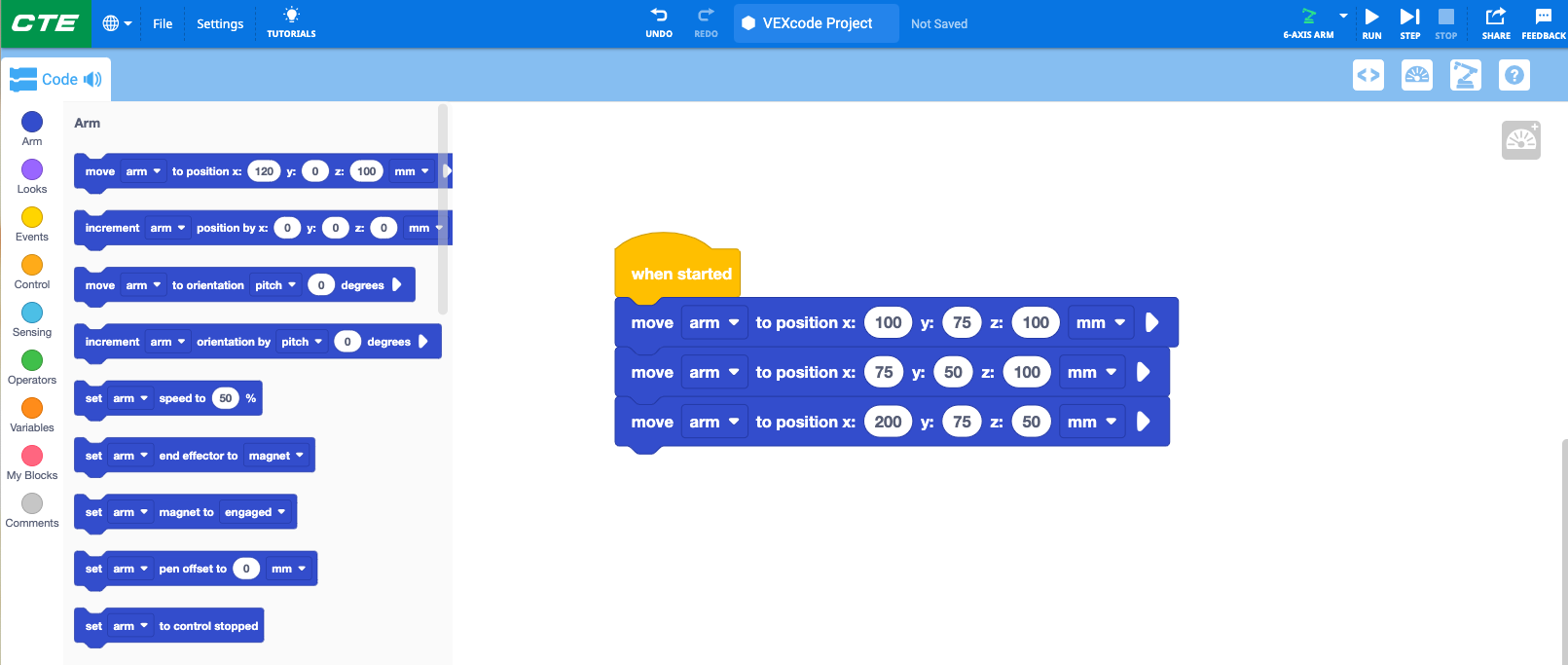
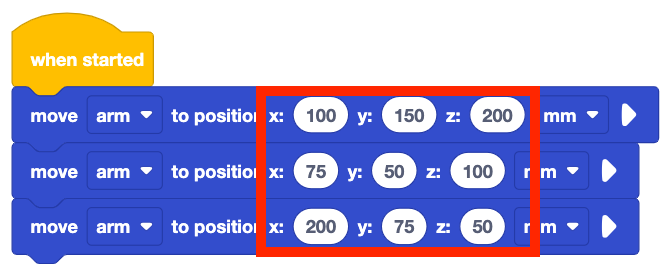
In questo esempio, il braccio a 6 assi si sposterà su tre coordinate in un ordine specifico:
- (100, 150, 200)
- (75, 50, 100)
- (200, 75, 50)
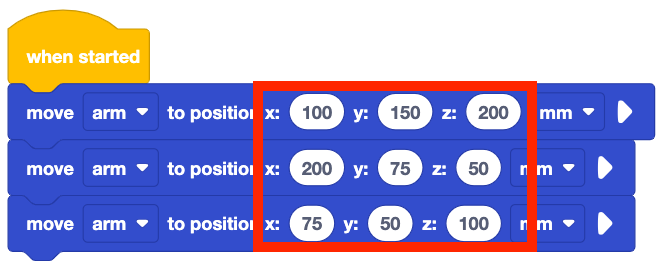
Trascinando i blocchi per riorganizzarli, i comandi vengono quindi posizionati in un ordine diverso. I comportamenti del Braccio a 6 Assi cambieranno, poiché ora si sposterà alle coordinate in questo ordine:
- (100, 150, 200)
- (200, 75, 50)
- (75, 50, 100)
In questo video, il braccio a 6 assi si sposta alle tre coordinate in un ordine specifico quando viene eseguito il progetto, come mostrato sopra. I blocchi vengono quindi riorganizzati. Quando il progetto viene eseguito di nuovo, il comportamento del braccio a 6 assi cambia, mentre si sposta verso le coordinate in un ordine diverso.
Attività
Ora che hai appreso i comportamenti dei robot e come i comportamenti si riferiscono a comandi specifici in VEXcode, puoi praticare queste abilità identificando i diversi comportamenti del braccio a 6 assi in questo video e cercando di equipararli ai blocchi.
- Inizia guardando questo video del braccio a 6 assi.
- Identifica tutti i comportamenti che vedi essere eseguiti dal braccio a 6 assi e dalla torre di segnalazione. Registrali nel tuo quaderno di ingegneria.
- Confronta il tuo elenco di comportamenti con i membri del tuo gruppo. Quali comportamenti avete che sono simili o diversi l'uno dall'altro?
- Confronta il tuo elenco di comportamenti con i blocchi in VEXcode. Quali blocchi si associano a ciascun comportamento che hai identificato? Registrali nel tuo quaderno di ingegneria.
Verifica la tua comprensione
Prima di iniziare la lezione successiva, assicurati di comprendere i concetti di questa lezione rispondendo alle domande nel documento seguente nel tuo quaderno di ingegneria.
Domande sulla comprensione > (Google Doc / .docx / .pdf)
Selezionare Avanti > per apprendere come codificare il braccio a 6 assi per spostarsi lungo l'asse x.