
في هذا الدرس، ستتعرف على أساسيات علوم الكمبيوتر بما في ذلك:
- ما هي لغة البرمجة.
- ما هو سلوك الروبوت.
- كيفية تعديل سلوكيات الروبوت.
في نهاية هذا الدرس، ستطبق المهارات التي تعلمتها لتحديد سلوكيات الذراع الروبوتية المكونة من 6 محاور، مثل تلك التي تظهر في الفيديو أدناه، بالإضافة إلى كتل VEXcode التي تتوافق مع كل سلوك.
فهم لغات البرمجة
لغة البرمجة هي مجموعة من القواعد التي تمثل فيها الرموز الإجراءات. تتبع لغات البرمجة التعليمات خطوة بخطوة التي ينفذها الكمبيوتر من أجل تشغيل المشروع.
VEXcode هي لغة البرمجة للذراع سداسي المحاور.
سلوكيات الروبوت
السلوكيات هي الإجراءات التي يقوم بها أو يجب أن يقوم بها الروبوت. التحرك لأعلى ولأسفل على طول محور، والتوقف، وتشغيل الأضواء على برج الإشارة أو إيقاف تشغيلها — هذه كلها سلوكيات. يتم تعريف السلوكيات من خلال لغة البرمجة.
لتغيير سلوكيات ذراع 6 محاور، يمكنك تغيير الكتل في المشروع. وتسمى هذه الكتل البرمجية أيضًا الأوامر. لقد قمت بتحرير الأوامر في الدرس السابق عندما غيرت لون أضواء برج الإشارة في النشاط.
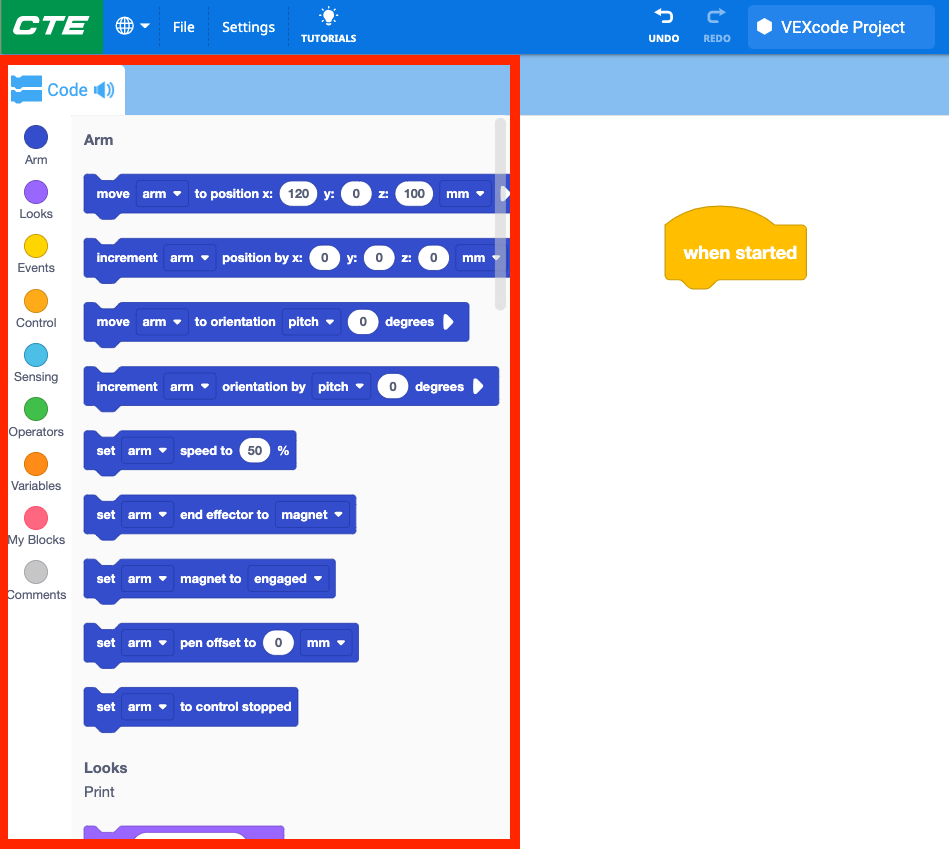
يمكنك العثور على جميع الكتل المتاحة للاستخدام مع ذراع 6 محاور وبرج الإشارة في صندوق الأدوات على الجانب الأيسر من VEXcode.
يمكنك الوصول إلى القائمة الكاملة للأوامر عن طريق التمرير عبر صندوق الأدوات.
لمعلوماتك
يمكنك معرفة المزيد عن أي من المكوّنات من خلال فتح المساعدة. تشرح المساعدة ما يفعله المكوِّن وكيفية استخدامه في المشروع. لفتح نافذة المساعدة، حدد أيقونة المساعدة ثم حدد المكوِّن الذي تريد معرفة المزيد عنه.
تعديل سلوكيات الروبوت
سيؤدي تغيير الكتل أو الأوامر في المشروع إلى تغيير سلوك الروبوت. سيؤدي تعديل المعلمات أو إضافة أو حذف أو ترتيب الكتل في المشروع إلى تعديل سلوكيات الروبوت.
تغيير المعلمات
تتسبب الإحداثيات (x، y، z) في معلمات كتلة الانتقال إلى الموضع في سلوك الانتقال إلى هذا الإحداثي المحدد. يؤدي تعديل المعلمات في الكتلة إلى تغيير سلوك الروبوت عن طريق تحريك ذراع 6 محاور إلى موقع مختلف.
على سبيل المثال، في هذا المشروع، سلوك ذراع 6 محاور هو الانتقال إلى الإحداثيات (100، 50، 100).
سيؤدي تغيير المعلمات في الكتلة إلى تحريك الذراع سداسي المحاور إلى الإحداثيات (150، 150، 200). هذا سلوك مختلف عن الأمر السابق، حيث ينتقل ذراع 6 محاور إلى موقع مختلف.
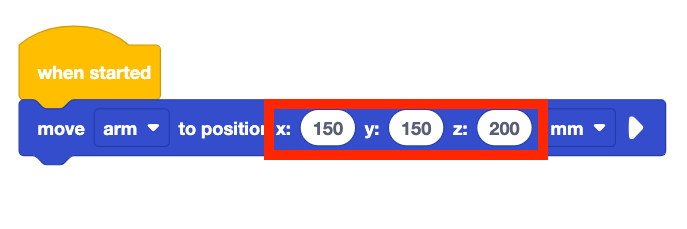
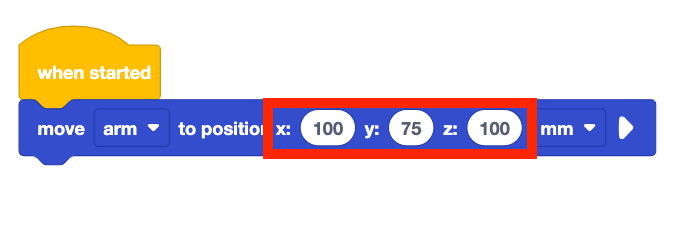
في هذا الفيديو، سلوكيات ذراع 6 محاور هي الانتقال إلى الإحداثيات (100، 75، 100) عند تشغيل المشروع. ثم يتم تغيير معلمات كتلة الانتقال إلى الموضع إلى (150، 150، 200). عند تشغيل المشروع مرة ثانية، يكون سلوك ذراع 6 محاور هو الانتقال إلى موقع مختلف.
لمعلوماتك
كما ذكرنا أعلاه، فإن الأوامر هي كتل البرمجة في خبرة VEXcode المستخدمة للتحكم في سلوكيات ذراع 6 محاور.

المعلمات هي تفاصيل كل أمر. يمكن أن تشمل هذه القوائم المنسدلة أو المدخلات الأخرى. في الكتلة الموضحة هنا، هناك العديد من المعلمات. واحد لاختيار الجهاز المراد الاتصال به، وواحد لكل من إحداثيات المحور، وواحد لتحديد الوحدات (ملليمتر أو بوصة).

إعادة ترتيب الكتل
يتم تشغيل الكتل في كومة من أعلى إلى أسفل، مع أداء كل سلوك بهذا الترتيب.
ستغير إعادة ترتيب الكتل سلوك الروبوت الذي يؤدي السلوكيات بترتيب مختلف.
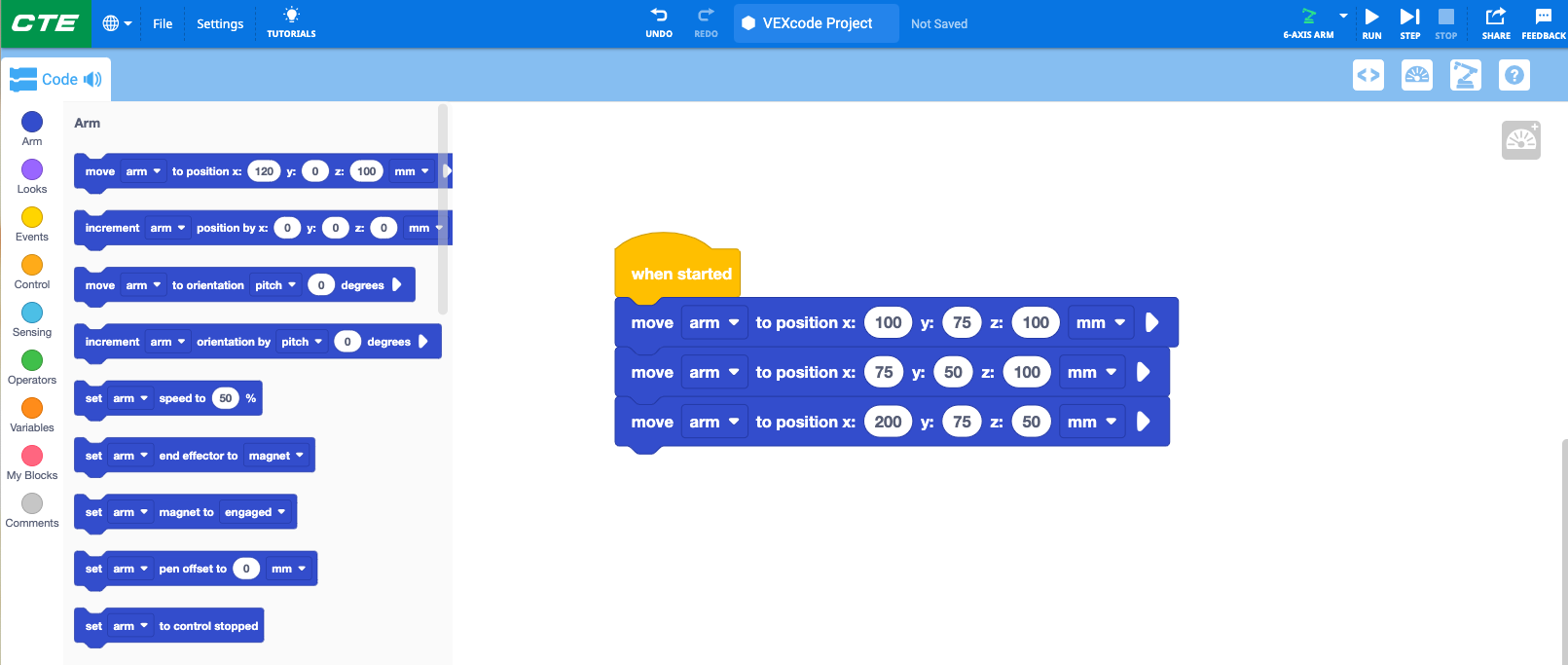
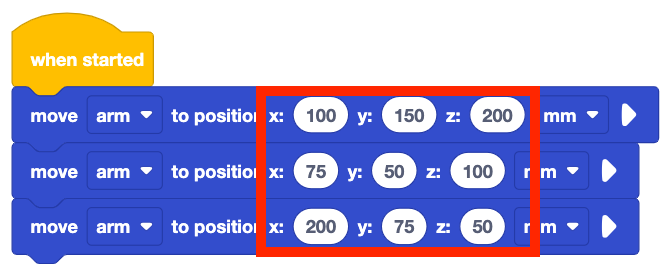
في هذا المثال، سينتقل ذراع 6 محاور إلى ثلاثة إحداثيات بترتيب معين:
- (100، 150، 200)
- (75، 50، 100)
- (200، 75، 50)
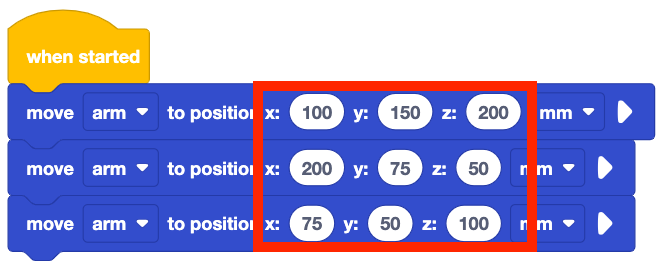
عن طريق سحب الكتل لإعادة ترتيبها، يتم بعد ذلك وضع الأوامر في ترتيب مختلف. ستتغير سلوكيات ذراع 6 محاور، حيث سينتقل الآن إلى الإحداثيات بهذا الترتيب:
- (100، 150، 200)
- (200، 75، 50)
- (75، 50، 100)
في هذا الفيديو، ينتقل ذراع 6 محاور إلى الإحداثيات الثلاثة بترتيب معين عند تشغيل المشروع، كما هو موضح أعلاه. ثم يتم إعادة ترتيب الكتل. عند تشغيل المشروع مرة أخرى، يتغير سلوك ذراع 6 محاور، حيث ينتقل إلى الإحداثيات بترتيب مختلف.
النشاط
الآن بعد أن تعرفت على سلوكيات الروبوت وكيفية ارتباط السلوكيات بأوامر محددة في VEXcode، يمكنك ممارسة هذه المهارات من خلال تحديد السلوكيات المختلفة لذراع 6 محاور في هذا الفيديو ومحاولة مساواتها بالكتل.
- ابدأ بمشاهدة هذا الفيديو لذراع 6 محاور.
- حدد جميع السلوكيات التي تراها تؤديها الذراع المكون من 6 محاور وبرج الإشارة. سجلها في دفتر ملاحظاتك الهندسي.
- قارن قائمة السلوكيات الخاصة بك مع أعضاء مجموعتك. ما هي السلوكيات التي لديك والتي تتشابه أو تختلف عن بعضها البعض ؟
- قارن قائمة السلوكيات الخاصة بك مع الكتل في VEXcode. ما هي الكتل التي تتناسب مع كل سلوك حددته ؟ سجل ذلك في دفترك الهندسي.
تحقق من فهمك
قبل البدء في الدرس التالي، تأكد من فهمك للمفاهيم الواردة في هذا الدرس من خلال الإجابة على الأسئلة الواردة في المستند أدناه في دفترك الهندسي.
تحقق من فهمك للأسئلة > (Google Doc / .docx / .pdf)
حدد التالي > لمعرفة كيفية ترميز ذراع 6 محاور للتحرك على طول المحور السيني.