
เล่น
ส่วนที่ 1 - ทีละขั้นตอน
- สั่งให้สั่งให้นักเรียนว่าพวกเขาจะได้รับความท้าทายในการสร้างโครงการเพื่อให้ Code Base ตรวจจับสิ่งกีดขวางทั้งหมดในพื้นที่ลงจอดบนดาวอังคาร พวกเขาจะได้รับการสนับสนุนให้สร้างโครงการของตนจาก Lab 1
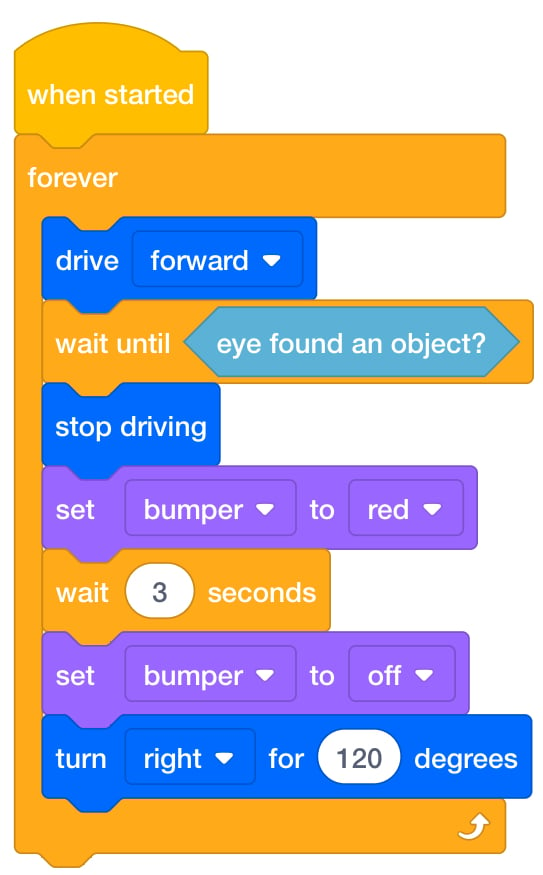
แอนิเมชั่นต่อไปนี้แสดงให้เห็นวิธีที่เป็นไปได้หนึ่งวิธีที่สามารถเข้ารหัสฐานรหัสสำหรับความท้าทาย Clear the Landing Area ได้
ไฟล์วีดีโอ - โมเดลโมเดลสำหรับนักเรียนที่จะเริ่มต้นโปรเจ็กต์ใน VEXcode GO
- หากจำเป็น ให้แสดงให้ผู้เรียนเห็นวิธีการเชื่อมต่อ Brain บน Code Base เข้ากับอุปกรณ์ใน VEXcode GO เนื่องจากขั้นตอนการเชื่อมต่อจะแตกต่างกันไปตามอุปกรณ์ต่างๆ, see the Connecting articles of the VEXcode GO VEX Library สำหรับขั้นตอนเฉพาะในการเชื่อมต่อ VEX GO Brain กับคอมพิวเตอร์หรือแท็บเล็ตของคุณ.
- พวกเขายังต้องกำหนดค่า VEXCode GO สำหรับ Code Base ด้วย If necessary, model the steps from the Configure a Code Base VEX Library article and ensure students can see the Drivetrain blocks in the Toolbox.
- ให้เด็กนักเรียนตั้งชื่อโปรเจ็กต์ของตนเองว่า Clear Area และบันทึกลงในอุปกรณ์ของตน See the Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
- ให้ผู้เรียนนำสิ่งที่เรียนรู้จากห้องแล็บอื่นๆ ไปปรับใช้เพื่อสร้างโครงการเพื่อให้ Code Base เคลียร์อุปสรรคทั้งหมดในสนาม พวกเขาจะต้องเพิ่มบล็อกและเปลี่ยนพารามิเตอร์ จากนั้นจึงทดสอบโครงการของพวกเขาในสนาม
หากจำเป็น เป็นแบบอย่างให้กับนักเรียนในการทดสอบโครงการของตนในภาคสนาม
-
แสดงให้พวกเขาเห็นวิธีการวางฐานโค้ดบนจุดเริ่มต้นที่มีเครื่องหมาย "X"
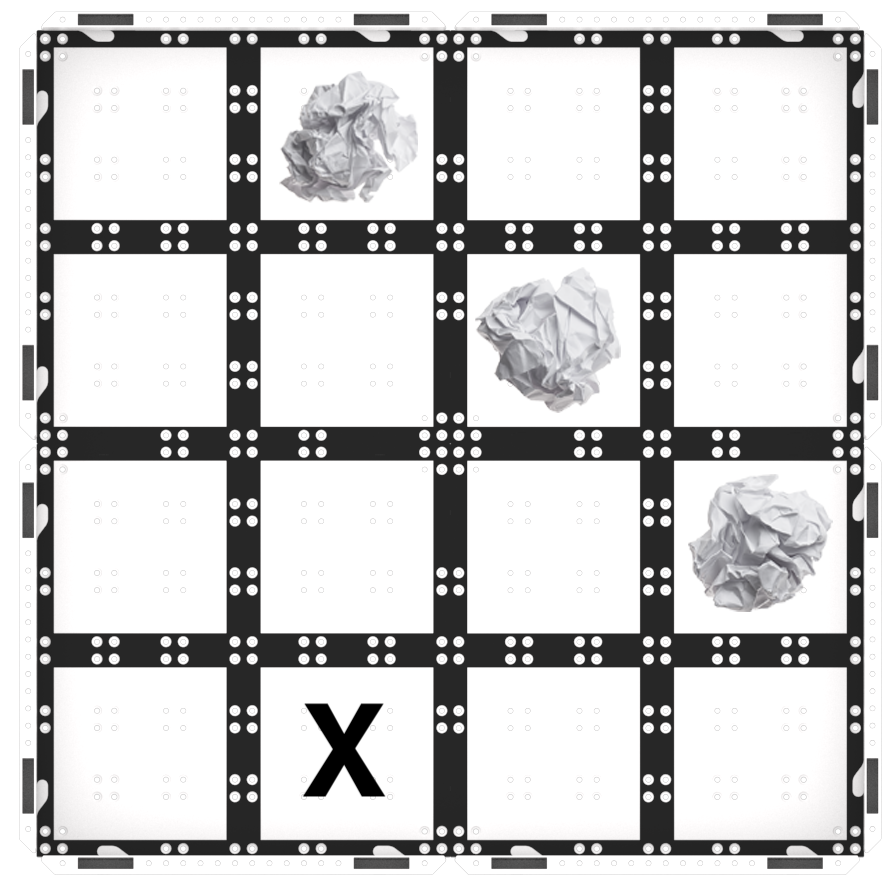
การเล่นส่วนที่ 1 การตั้งค่าสนาม -
ตรวจสอบให้แน่ใจว่าเซนเซอร์ตาซึ่งอยู่ที่ด้านหน้าของหุ่นยนต์หันไปทางสิ่งกีดขวางแรก
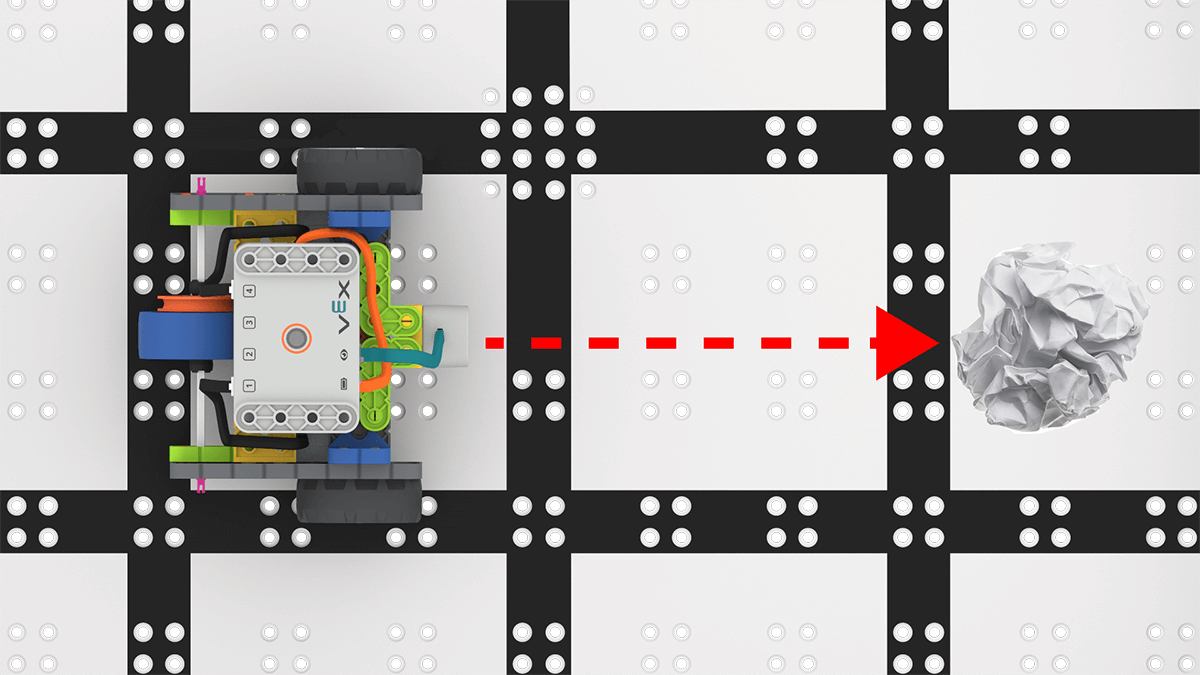
เซ็นเซอร์ตาหันหน้าเข้าหาสิ่งกีดขวาง -
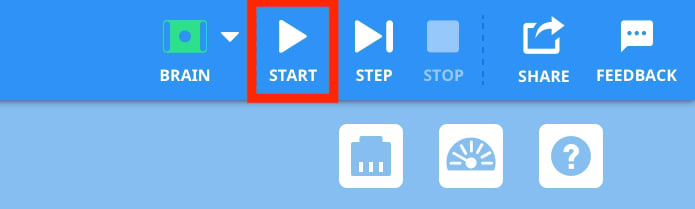
วางฐานโค้ดลงบนฟิลด์และเลือก "เริ่ม" ใน VEXcode GO เพื่อทดสอบโครงการของพวกเขา
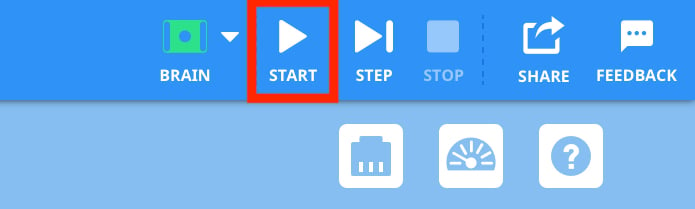
เลือก 'เริ่ม' เพื่อทดสอบโครงการ - นักเรียนควรลบสิ่งกีดขวางออกไปหลังจากที่ถูกฐานโค้ดตรวจพบ
-
นักเรียนจะต้องเลือกปุ่ม 'หยุด' ในแถบเครื่องมือ VEXcode GO เพื่อหยุดโครงการ
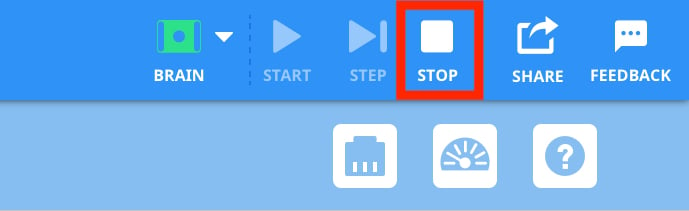
เลือก 'หยุด' - หมายเหตุ: หากนักเรียนใช้ลูปตลอดไป ฐานโค้ดจะไม่หยุดจนกว่าจะเลือกปุ่มหยุด ในสถานการณ์นี้ ให้ให้เด็กนักเรียนหยุดโครงการเมื่อฐานโค้ดตรวจพบสิ่งกีดขวางทั้งหมด ทำซ้ำวงจรสี่ครั้งโดยไม่ตรวจพบสิ่งกีดขวาง หรือหากสิ่งกีดขวางติดอยู่ที่ขอบสนาม
- สำหรับกลุ่มที่เสร็จเร็วและต้องการความท้าทายเพิ่มเติม ให้พวกเขาทดลองกับจุดเริ่มต้นที่แตกต่างกัน โครงการของพวกเขายังใช้งานได้ไหม?
- อำนวยความสะดวกอำนวยความสะดวกในการสนทนากับนักเรียนในขณะที่พวกเขาทดลองกับโครงการของพวกเขา
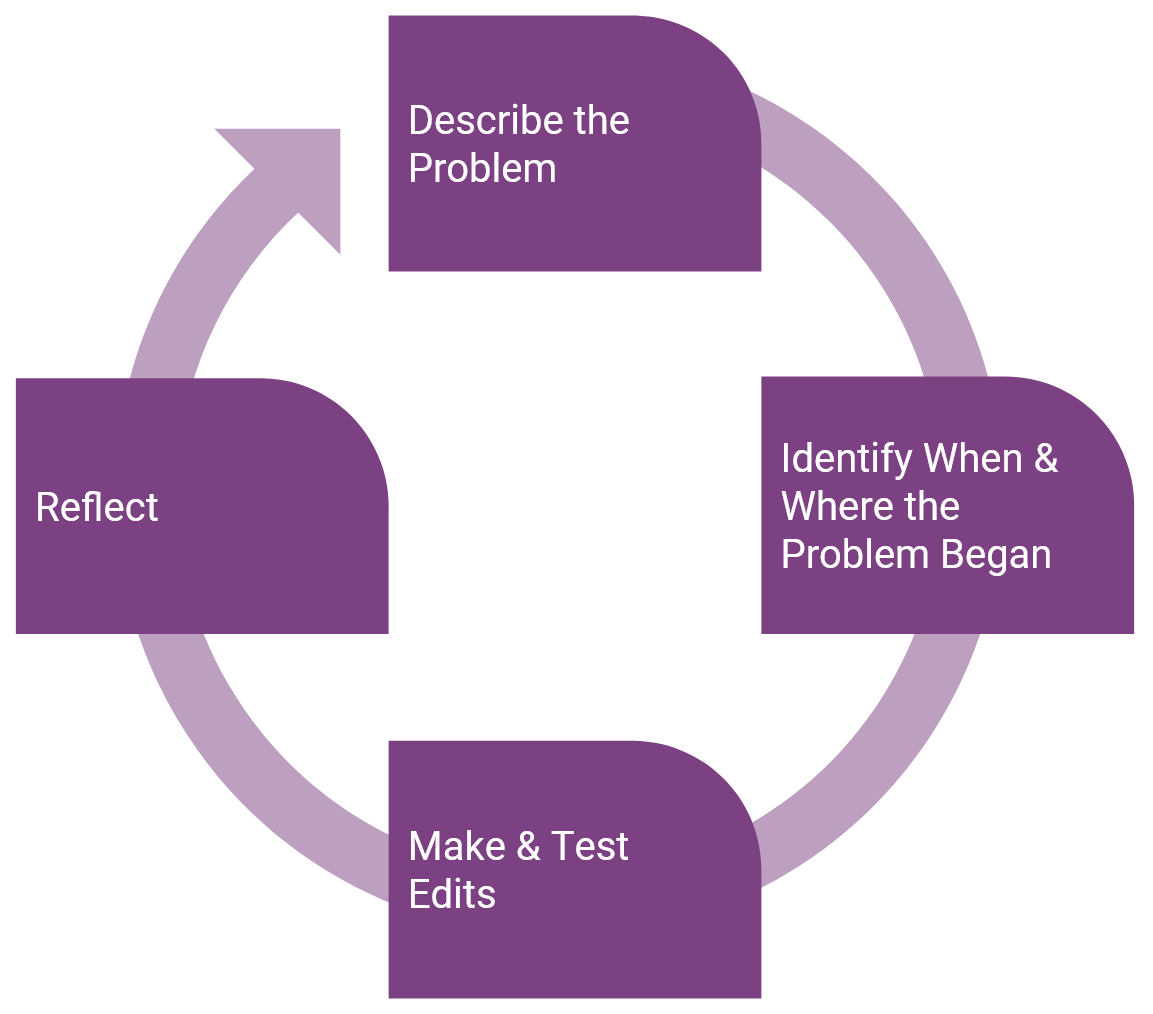
- เตรียมนักเรียนสำหรับการลองผิดลองถูกซึ่งเป็นส่วนสำคัญของการทดลองที่พวกเขาจะทำกับความท้าทายนี้ คุณอาจต้องการใช้กราฟิกวงจรการแก้ปัญหาจากหน้าพื้นหลังเป็นตัวช่วยในการสร้างโครงสร้างสำหรับกระบวนการแก้ปัญหาพร้อมกับนักเรียนของคุณ
การแก้ปัญหาของนักเรียน รอบที่ - หากนักเรียนใช้ลูปในโปรเจ็กต์ของตนโดยใช้บล็อก [Forever] หรือบล็อก [Repeat] แต่ฐานโค้ดไม่ได้เคลื่อนไหวตามที่ตั้งใจไว้ ก็แสดงว่าพวกเขาอาจไม่มีบล็อกที่จำเป็นทั้งหมดภายในลูป หรือพวกเขาอาจจัดลำดับบล็อกภายในลูปในลักษณะที่ทำให้ฐานโค้ดเคลื่อนไหวในลักษณะที่ไม่ได้ตั้งใจ
- ใช้คุณลักษณะ Project Stepping เพื่อช่วยให้นักเรียนดำเนินการโครงการทีละบล็อกเพื่อดูว่ามีการดำเนินการแต่ละบล็อกในโครงการอย่างไร วิธีนี้จะทำให้ผู้เรียนเห็นการทำงานของลูปในโปรเจ็กต์ของตนได้ และจะให้ข้อมูลตอบรับทางภาพเพื่อแสดงว่าบล็อกใดอาจทำให้เกิดข้อผิดพลาด ทำให้การดีบักกลายเป็นกระบวนการที่ตรงเป้าหมายและมีประสิทธิภาพมากขึ้น For more information on how to use the Project Stepping feature, see the Stepping Through a Project in VEXcode GO VEX Library Article.
- เตือนนักเรียนว่าพวกเขาสามารถใช้คุณลักษณะไฮไลต์เพื่อดูว่าบล็อกใดกำลังถูกดำเนินการและเมื่อใดขณะที่พวกเขารันโปรเจ็กต์ คำถามต่อไปนี้สามารถใช้เพื่อส่งเสริมให้ผู้เรียนระบุว่าวงจรส่งผลต่อการไหลของโครงการอย่างไรด้วยคุณลักษณะไฮไลท์
- เมื่อมีการวนซ้ำในโปรเจ็กต์ของเรา ไฮไลท์จะเคลื่อนที่อย่างไร?
- บล็อก VEXcode GO ใดที่สร้างลูป?
- บล็อกใดบ้างที่ทำซ้ำในโครงการของคุณ?
- หากฐานโค้ดไม่หมุน นักเรียนอาจไม่ได้เพิ่มบล็อก [หมุนเพื่อ] แสดงให้เด็กนักเรียนเห็นถึงวิธีการเพิ่มบล็อก [หมุนเพื่อ] เพื่อให้หุ่นยนต์เปลี่ยนทิศทางหลังจากตรวจพบสิ่งกีดขวาง มิฉะนั้น ฐานโค้ดจะขับไปข้างหน้าแล้วหยุด เนื่องจากนักเรียนอาจไม่คุ้นเคยกับมุม คุณอาจต้องการจัดเตรียมมุมต่างๆ ให้พวกเขาได้ทดลองใช้ เช่น 60, 90, 120 องศา
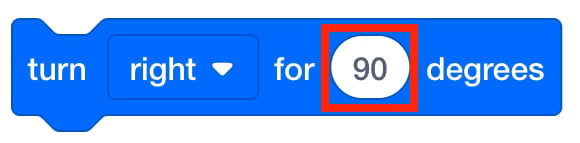
- เตือนพวกเขาว่าพวกเขาสามารถเปลี่ยนมุมการเลี้ยวในวงรีอินพุตในบล็อก [Turn for] ได้ หากทำการทดลองกับมุมเลี้ยว ให้ถามนักเรียนว่าการเปลี่ยนแปลงพารามิเตอร์นี้ส่งผลต่อการเคลื่อนไหวของฐานโค้ดอย่างไร ถ้าเราเพิ่มมุมเลี้ยวจะเกิดอะไรขึ้น? มันเปลี่ยนแปลงการเคลื่อนไหวของ Code Base อย่างไร? การเปลี่ยนแปลงนี้ทำให้ Code Base ตรวจจับสิ่งกีดขวางได้มากขึ้นหรือไม่ หากไม่เป็นเช่นนั้น ให้ลองเปลี่ยนมุมเลี้ยว
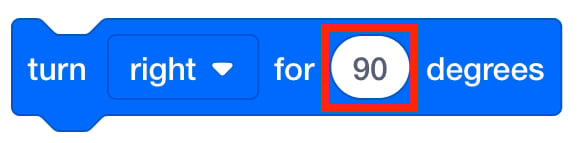
เปลี่ยนมุมเลี้ยวในบล็อค [เลี้ยวเพื่อ] - เตือนใจเตือนใจนักเรียนว่าความท้าทายนี้ต้องการการสำรวจที่สนุกสนาน และจะมีวัฏจักรของการลองผิดลองถูก พวกเขาจะทำผิดพลาดในโครงการของพวกเขาขณะที่ทำการทดลอง และทุกครั้งที่พวกเขาทำผิดพลาดในโค้ด พวกเขาก็มีโอกาสที่จะเรียนรู้สิ่งใหม่ๆ! ช่วยให้นักเรียนระบุได้ว่าโค้ดมีปัญหาตรงส่วนไหน และเสนอไอเดียในการแก้ไขปัญหานั้น
- มีอะไรผิดปกติหรือเปล่า? ยอดเยี่ยม! ปัญหาอยู่ตรงไหนของโค้ด? คุณจะเปลี่ยนบล็อคนั้นได้อย่างไร?
- คุณต้องการบล็อกอื่นหรือคุณต้องการเปลี่ยนแปลงพารามิเตอร์ในบล็อกนี้หรือไม่?
-
คุณชอบความผิดพลาดอะไรที่สุดจนถึงตอนนี้? คุณได้เรียนรู้อะไรจากมัน?
- ถามถามนักเรียนว่าพวกเขาคิดว่ารถสำรวจดาวอังคารตัวจริงจะใช้เซ็นเซอร์แบบห่วงและตาเพื่อตรวจจับสิ่งกีดขวางบนพื้นดินก่อนที่จะลงจอดได้อย่างไร
พักเบรกกลางเกม & อภิปรายเป็นกลุ่ม
เมื่อกลุ่ม แต่ละกลุ่มได้ทดลองโครงการของตนเพื่อแก้ไขความท้าทายแล้ว ให้มารวมตัวกันเพื่อพูดคุยสั้นๆ
ขอให้นักเรียนแสดงโครงการของพวกเขาและอธิบายว่า Code Base กำลังทำอะไร นี่เป็นโอกาสที่จะตรวจสอบความก้าวหน้าของนักเรียนและแก้ไขปัญหา
- โปรเจ็กต์ของคุณทำอะไรได้ดีบ้าง?
- คุณเผชิญกับความท้าทายอะไรบ้างในการดำเนินโครงการของคุณ?
ให้แน่ใจว่านักเรียนเข้าใจว่าพวกเขาสามารถใช้ลูปเพื่อให้ฐานโค้ดตรวจสอบสิ่งกีดขวางบนสนามซ้ำๆ ได้
- พวกเขาใช้ลูปเพื่อให้ Code Base ตรวจจับวัตถุหลายรายการหรือไม่ หากไม่เป็นเช่นนั้น ให้เตือนนักเรียนเกี่ยวกับบล็อก [ตลอดไป] และ [ทำซ้ำ] ที่คุณพูดถึงในส่วนการมีส่วนร่วม
- ถ้าใช้ลูปจะใช้งานยังไงครับ? พวกเขาใช้บล็อคอะไรในการสร้างลูปในโครงการของพวกเขา?
- ลำดับของบล็อกในลูปส่งผลต่อพฤติกรรมของฐานโค้ดอย่างไร
- จะเกิดอะไรขึ้นถ้าบล็อกบางส่วนไม่อยู่ในลูป [Forever] หรือ [Repeat] บล็อคเหล่านั้นจะเกิดขึ้นซ้ำอีกไหม?
เตรียมพร้อมสำหรับความท้าทายในรูปแบบต่างๆ ในการเล่นส่วนที่ 2:
- ถ้าเราเปลี่ยนตำแหน่งสิ่งกีดขวางจะเกิดอะไรขึ้น? โครงการนี้จะยังใช้งานได้ไหม? ทำไมหรือทำไมไม่?
ตอนที่ 2 - ทีละขั้นตอน
- สั่งให้สั่งให้นักเรียนเคลื่อนย้ายสิ่งกีดขวางบนพื้นที่ลงจอดบนดาวอังคาร และดำเนินการทดลองกับโครงการของพวกเขาต่อไป เป้าหมายคือให้ฐานรหัสตรวจจับสิ่งกีดขวางทั้งหมดบนสนาม แม้ว่าตำแหน่งจะเปลี่ยนแปลงก็ตาม! สนับสนุนให้พวกเขาใช้สิ่งที่พวกเขาเรียนรู้เกี่ยวกับลูปและบล็อก [ทำซ้ำ] หรือ [ตลอดไป] เพื่ออัปเดตโครงการของพวกเขา ดูแอนิเมชั่นด้านล่างเพื่อดูตัวอย่างว่า Code Base สามารถทำภารกิจนี้ให้สำเร็จได้อย่างไร
ไฟล์วีดีโอ
- โปรดทราบว่าแอนิเมชันจะหยุดลงเมื่อตรวจพบและลบวัตถุทั้งหมดแล้ว แต่การวนซ้ำ [ตลอดไป] จะทำให้โค้ดฐานทำงานตลอดไปในวนซ้ำนั้นจนกว่าโครงการจะหยุดลง
- แบบจำลอง แบบจำลองสำหรับนักเรียนในการตั้งค่าภาคสนามและทดสอบโครงการของพวกเขา
-
ขั้นแรก ให้พวกเขาดูวิธีวางสิ่งกีดขวางในตำแหน่งใหม่บนสนาม จากนั้นเลือกจุดเริ่มต้นแล้วทำเครื่องหมายด้วย "X" ต่อไปนี้เป็นวิธีหนึ่งที่เป็นไปได้ในการตั้งค่าฟิลด์
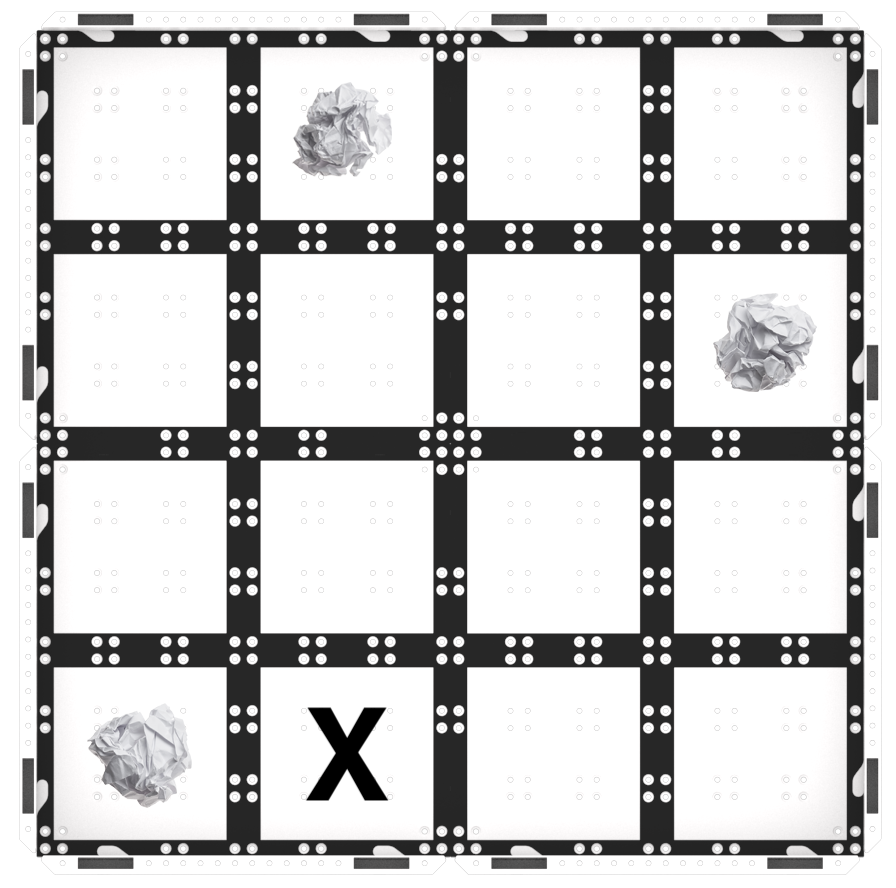
ตัวอย่างการตั้งค่าสนามส่วนที่ 2 การเล่น -
เมื่อมีอุปสรรคและฐานโค้ดแล้ว พวกเขาสามารถเลือก "เริ่ม" ใน VEXcode GO เพื่อทดสอบโครงการของพวกเขาได้
เลือก 'เริ่ม' เพื่อทดสอบโครงการ - นักเรียนจะต้องเลือกปุ่ม “หยุด” ในแถบเครื่องมือเพื่อหยุดฐานโค้ด
-
มีหลายวิธีแก้ไขสำหรับความท้าทายนี้ ต่อไปนี้เป็นตัวอย่างหนึ่งเพื่อใช้อ้างอิง
วิธีแก้ปัญหาที่เป็นไปได้
-
-
- อำนวยความสะดวกอำนวยความสะดวกในการสนทนากับนักเรียนในขณะที่พวกเขาทดสอบโครงการของพวกเขา
- หากนักเรียนต้องการความช่วยเหลือในการทำให้ Code Base ทำซ้ำส่วนต่างๆ ของโค้ดเพื่อตรวจจับสิ่งกีดขวางทั้งหมดบนสนาม แนะนำให้นักเรียนใช้บล็อก [Repeat] หรือบล็อก [Forever] ตามที่คุณพูดถึงในส่วน Engage และแสดงให้พวกเขาเห็นวิธีใช้ในโปรเจ็กต์ของพวกเขา กระตุ้นให้พวกเขาตรวจสอบเพื่อให้แน่ใจว่าโครงการทั้งหมดอยู่ในบล็อก C ดังที่แสดงด้านล่าง
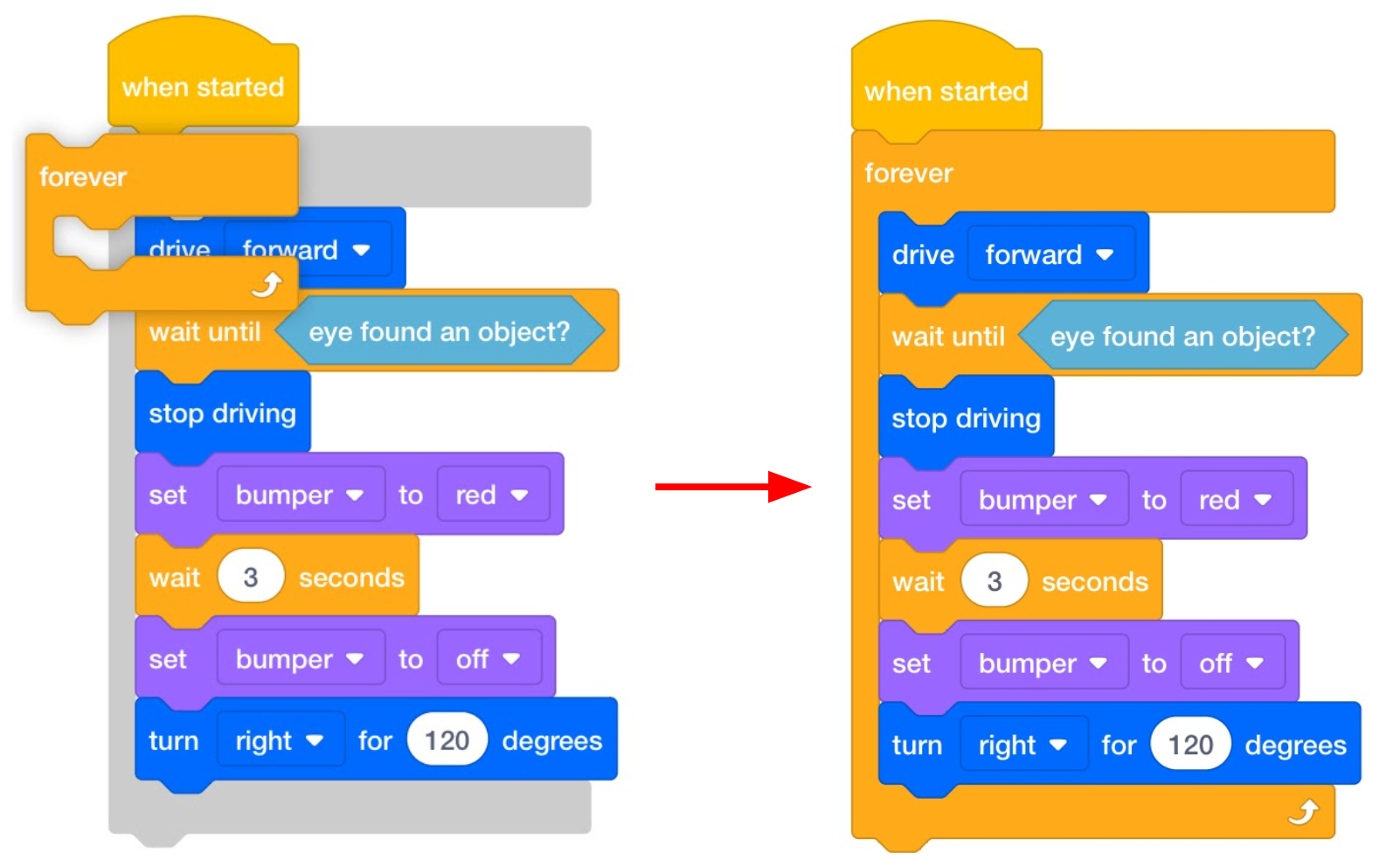
เพิ่มบล็อค [ตลอดไป] - หากนักเรียนสร้างโครงงานขึ้นมาแล้วแต่โครงงานยังไม่สามารถตรวจจับวัตถุทั้งหมดได้ ให้กระตุ้นให้นักเรียนทดลองด้วยมุมเลี้ยว โดยกำหนดมุมเลี้ยวต่อไปนี้ให้นักเรียนทดลองด้วย เช่น 60, 90 และ 120 องศา มุมเลี้ยวส่งผลต่อการเคลื่อนไหวของ Code Base อย่างไร?
การเปลี่ยนมุมเลี้ยว ดึงดูดนักเรียนให้มีส่วนร่วมในการสนทนาเพิ่มเติมในขณะที่พวกเขาสร้างโครงการเพื่อให้พวกเขาได้แบ่งปันความคิดในขณะที่พวกเขาทำซ้ำและทดสอบโครงการของพวกเขา
- อุปสรรคใดที่ Code Base ตรวจพบเป็นอันดับแรกในโครงการของคุณ?
- Code Base ทำอะไรหลังจากตรวจพบสิ่งกีดขวาง? คุณใช้บล็อคอะไรให้มันทำแบบนี้?
- คุณใช้บล็อกอะไรเพื่อให้ Code Base เคลื่อนไปยังอุปสรรคถัดไปหลังจากผ่านอุปสรรคหนึ่งไปแล้ว?
- โครงการของคุณทำให้ Code Base เคลียร์พื้นที่ลงจอดทั้งหมดได้อย่างไร?
- เตือนเตือนนักเรียนให้เริ่มจากจุดเดียวกันสำหรับการทดสอบ พวกเขาต้องการเปลี่ยนเพียงตัวแปรเดียว — ตำแหน่งของสิ่งกีดขวาง
-
เตือนนักเรียนด้วยให้เริ่มต้นด้วยเซ็นเซอร์ตาบน Code Base โดยหันหน้าไปที่อุปสรรคแรก วิธีนี้จะทำให้ Code Base เดินทางไปยังอุปสรรคแรกได้อย่างรวดเร็ว และจะทำให้นักเรียนประสบความสำเร็จกับโครงการของตนได้ทันที
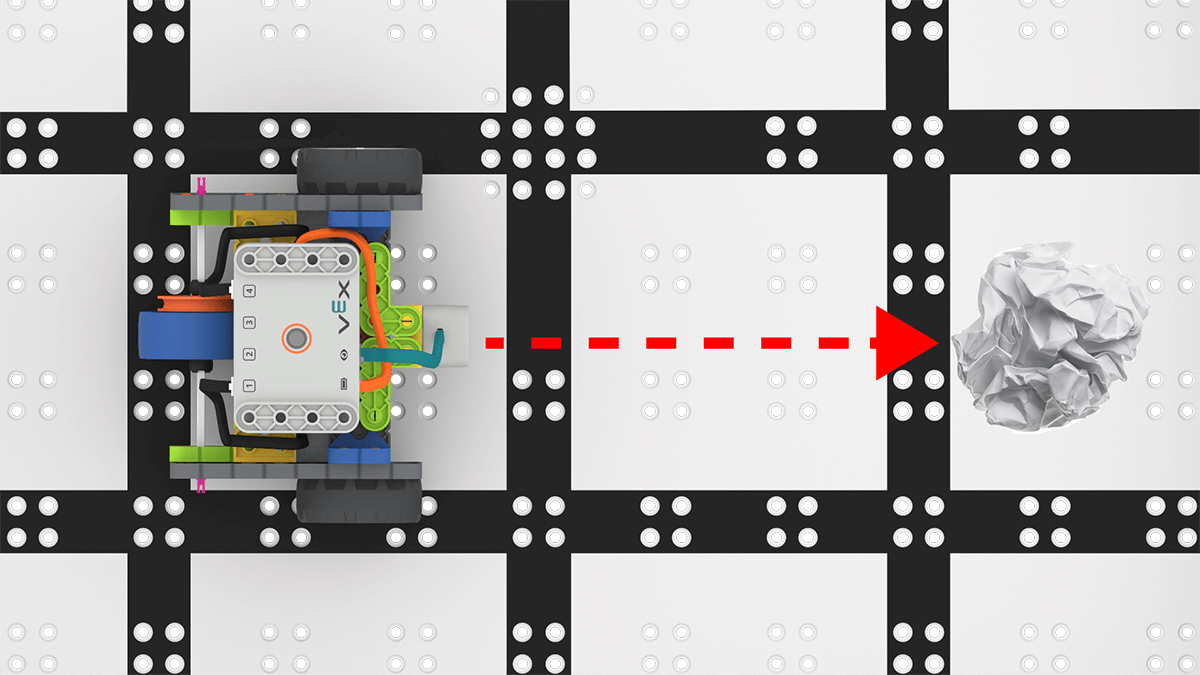
เซ็นเซอร์ตาหันหน้าเข้าหาสิ่งกีดขวาง
เตือนนักเรียนเกี่ยวกับกลยุทธ์การแก้ไขปัญหาตามความจำเป็น
- หาก Code Base ไม่ตอบสนอง ให้ลองตัดการเชื่อมต่อแล้วเชื่อมต่อ Brain ใหม่แล้วลองอีกครั้ง สิ่งนี้อาจเกิดขึ้นได้หากมีระยะเวลานานเกินไประหว่างการขับเคลื่อน Code Base
- If students are having trouble connecting their Code Base to their computer or tablet, view the Connecting articles in the VEXcode GO VEX Library, to see details on how to connect the Code Base to the device being used.
- If groups are having trouble starting their project in VEXcode GO, refer to the Starting a Project in VEXcode GO VEX Library article, to see the steps necessary to successfully start a project.
- Review the Using the VEX GO Sensors and the Coding with the VEX GO LED Bumper articles for additional information on the Eye Sensor and the LED Bumper.
-
- ถามขอให้เด็กนักเรียนคิดว่าโครงการของพวกเขามีการเปลี่ยนแปลงอย่างไรตลอดความท้าทาย
- โครงการของคุณเปลี่ยนแปลงไปอย่างไรบ้างตั้งแต่เริ่มทำแล็ปจนถึงปัจจุบัน?
- คุณเปลี่ยนแปลงอะไรในโครงการของคุณเพื่อให้ทำงานได้ดีขึ้น?
- คุณทำการเปลี่ยนแปลงอะไรที่ทำให้ประสบความสำเร็จน้อยลง? คุณแก้ไขปัญหายังไง?