
Bài 3: Nhặt và di chuyển đĩa
Trong Bài học trước, bạn đã sử dụng khối [Năng lượng nam châm điện] và khối Truyền động Robot VR. Bài học này sẽ giải quyết cùng một thách thức bằng cách sử dụng phản hồi cảm biến được báo cáo và khối [Lặp lại cho đến khi].
Kết quả học tập
- Xác định cách sử dụng khối [Lặp lại cho đến khi] trong một dự án.
- Xác định khối <Eye Sensor near object> báo cáo liệu Cảm biến mắt có đủ gần vật thể để phát hiện màu sắc hay không.
- Xác định lệnh [Chuyển hướng] sẽ chuyển hệ thống truyền động theo hướng cụ thể bằng cách sử dụng Cảm biến con quay hồi chuyển.
- Xác định rằng lệnh [Chuyển hướng] sẽ xác định hướng rẽ dựa trên hướng hiện tại của Cảm biến con quay hồi chuyển.
- Giải thích tại sao lệnh [Quay theo hướng] được sử dụng thay cho lệnh [Quay] hoặc lệnh [Quay để].
Tại sao nên sử dụng cảm biến?
Trong Bài 2, Robot VR đã di chuyển một khoảng cách xác định bằng cách sử dụng khối [Lái tới] để nhặt và di chuyển một đĩa màu xanh trở lại mục tiêu. Khoảng cách giữa Robot VR và đĩa xanh đầu tiên được ước tính và kiểm tra bằng cách sử dụng kích thước của các ô lưới trên Sân chơi di chuyển đĩa . Mặc dù điều này đã giải quyết được thử thách, nhưng vẫn có nhiều khả năng xảy ra lỗi khi lặp lại quy trình để nhặt nhiều đĩa ở các khoảng cách khác nhau, điều này là cần thiết để giải quyết Thử thách di chuyển đĩa ở cuối Đơn vị này. Sử dụng phản hồi cảm biến được báo cáo là cách hiệu quả hơn để giải quyết thách thức này, đồng thời tối ưu hóa dự án bằng cách sử dụng ít khối hơn.
Sẽ thế nào nếu Robot VR va vào đĩa và bị lệch hướng? Nếu các đĩa ở vị trí hơi khác so với mục tiêu thì sao? Phản hồi từ các cảm biến có thể được sử dụng để nhặt và di chuyển đĩa một cách chính xác mà không cần biết vị trí chính xác của chúng trên Sân chơi di chuyển đĩa.
Các bước giải quyết thách thức có thể được sử dụng để xác định cảm biến nào sẽ được sử dụng trong dự án.
-
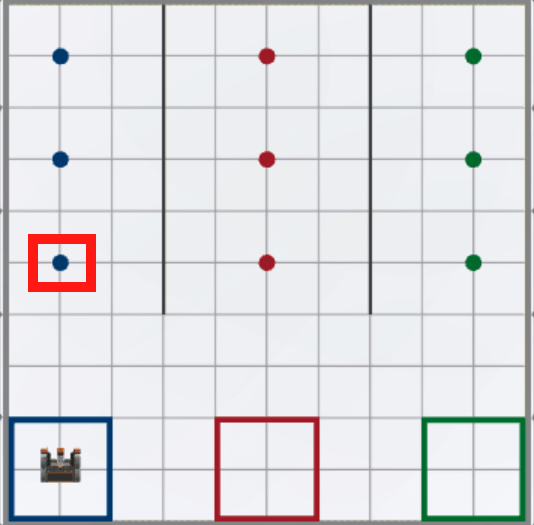
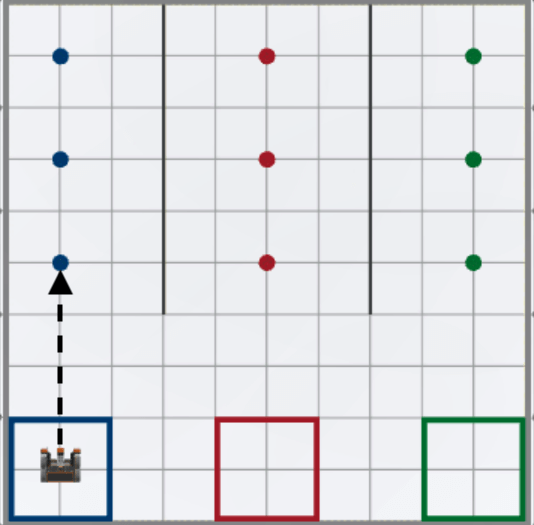
Đầu tiên: Robot VR sẽ di chuyển đến đĩa màu xanh đầu tiên.
-
Các đĩa nằm trên mặt đất của Sân chơi. Để xác định vị trí của đĩa, Cảm biến mắt xuống có thể được sử dụng với khối <Eye Sensor near object>.

-
-
Thứ hai: Robot VR sẽ nhặt đĩa màu xanh đầu tiên.

-
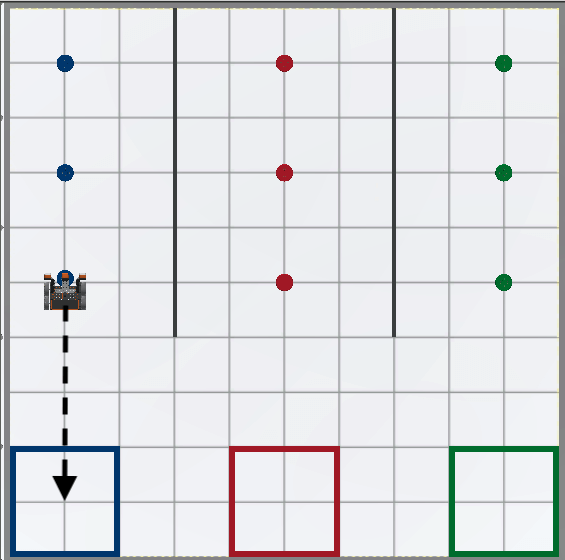
Thứ ba: Robot VR sẽ lái xe trở về mục tiêu màu xanh.
-
Khi lái xe trở lại mục tiêu màu xanh, Robot VR sẽ sử dụng Cảm biến khoảng cách để xác định thời điểm dừng lái xe. Cảm biến khoảng cách có thể được sử dụng để xác định khoảng cách từ mặt trước của Robot VR đến tường của Sân chơi.
-
-
Cuối cùng: Robot VR sẽ thả đĩa màu xanh vào mục tiêu màu xanh.
Chọn nút Tiếp theo để tiếp tục phần còn lại của Bài học này.