الدرس 4: تدفق المشروع مع الحلقات المتداخلة
مع الحلقات المتداخلة، يمكن أن يبدو تدفق المشروع ساحقًا. يبدأ المشروع بالتحقق من تكرار أو ظروف الحلقة
الخارجية ثم تشغيل الحلقة الداخلية للبدء.
يتم تنفيذ الحلقة الداخلية حتى يتم الانتهاء من جميع التكرارات
أو استيفاء الشرط، قبل العودة إلى الحلقة الخارجية. تتكرر هذه الدورة حتى تكتمل جميع تكرارات الحلقة الخارجية
أو حتى يتم استيفاء حالة الحلقة الخارجية.
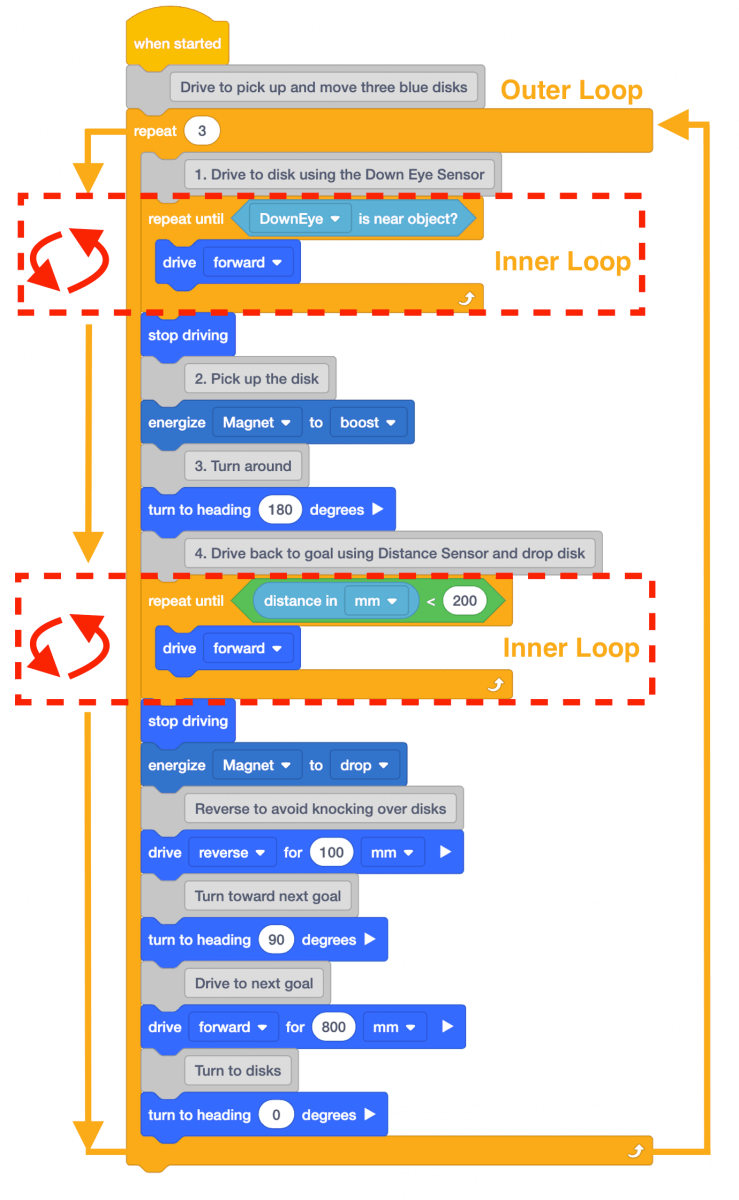
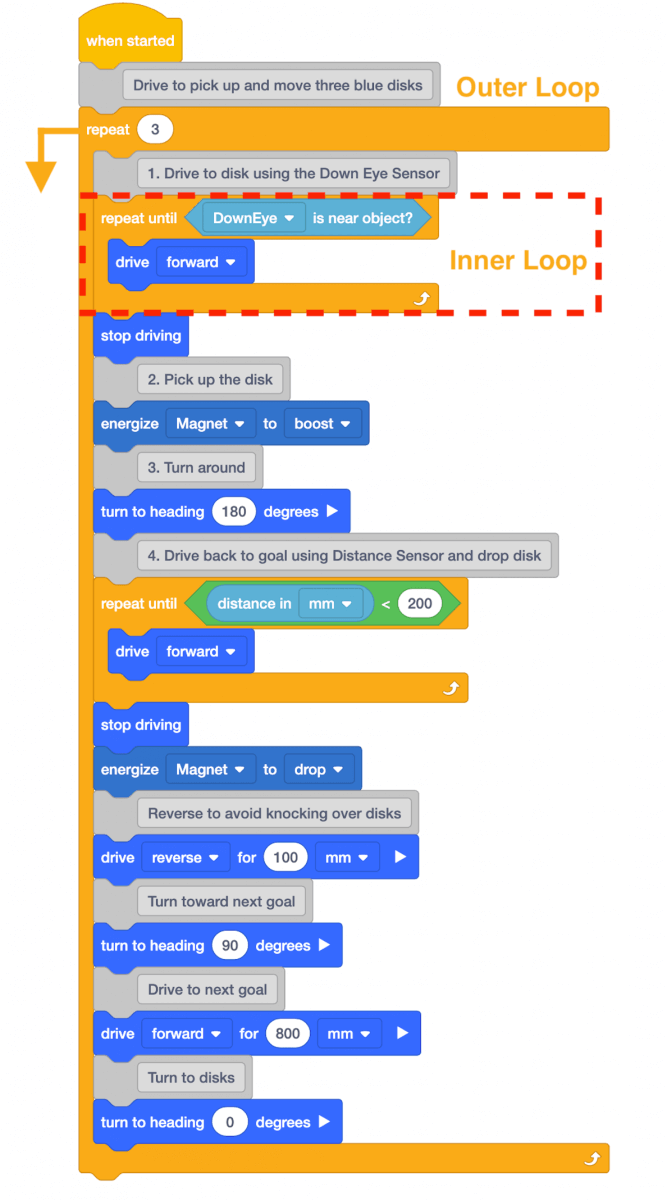
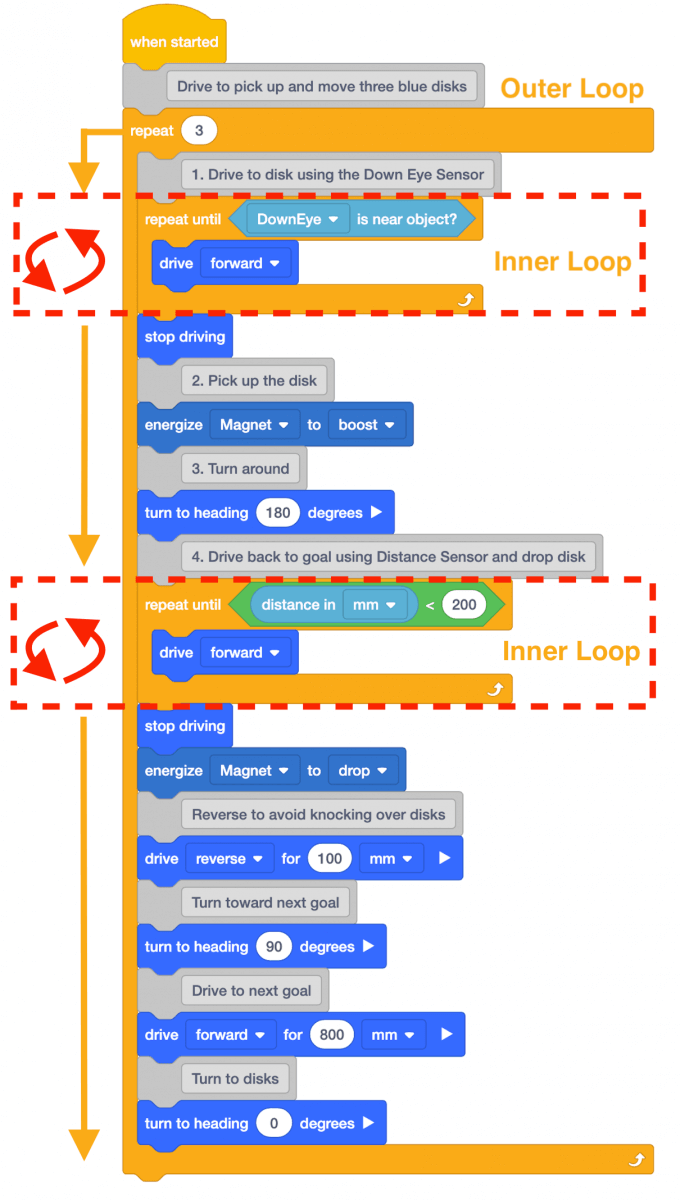
في المثال أدناه، يبدأ المشروع ببدء التكرار الأول للحلقة الخارجية. في هذه الحالة، تتكرر الحلقة الخارجية ثلاث مرات.
-
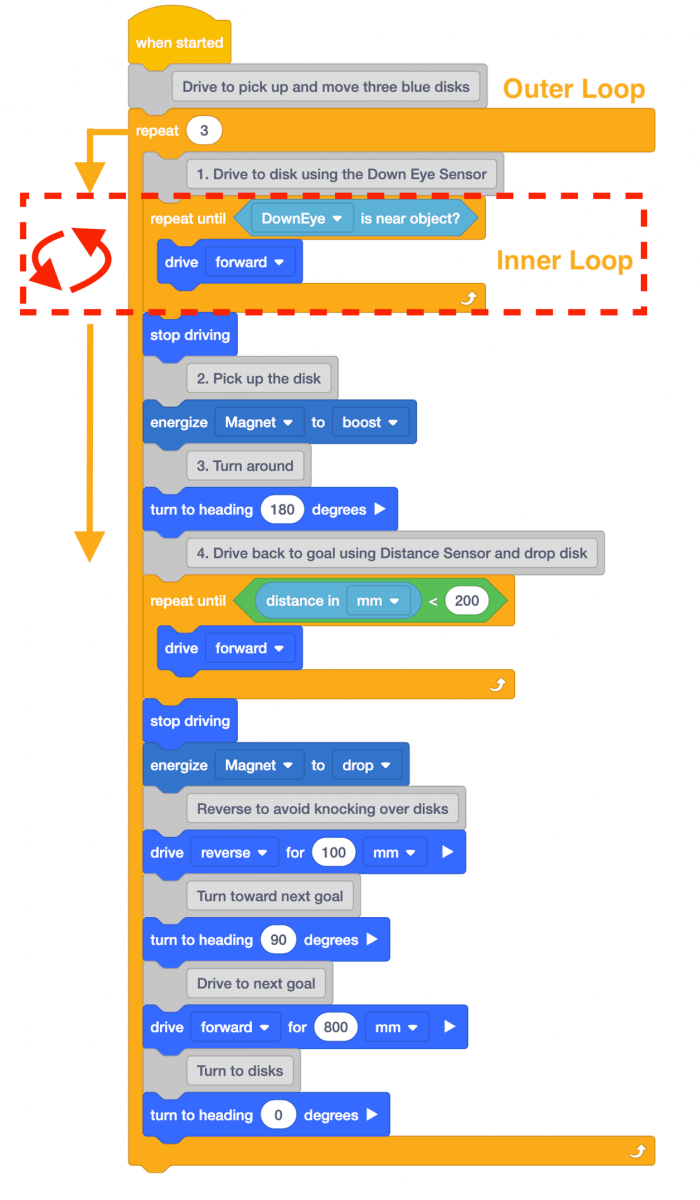
أول كتلة [كرر حتى] هي الحلقة الداخلية الأولى.
-
سيتم تشغيل الحلقة الداخلية الأولى حتى يتم الإبلاغ عن الحالة على أنها صحيحة. ثم ينكسر المشروع من الحلقة الداخلية الأولى ويبدأ في التحرك عبر بقية الكتل داخل الحلقة الخارجية.
-
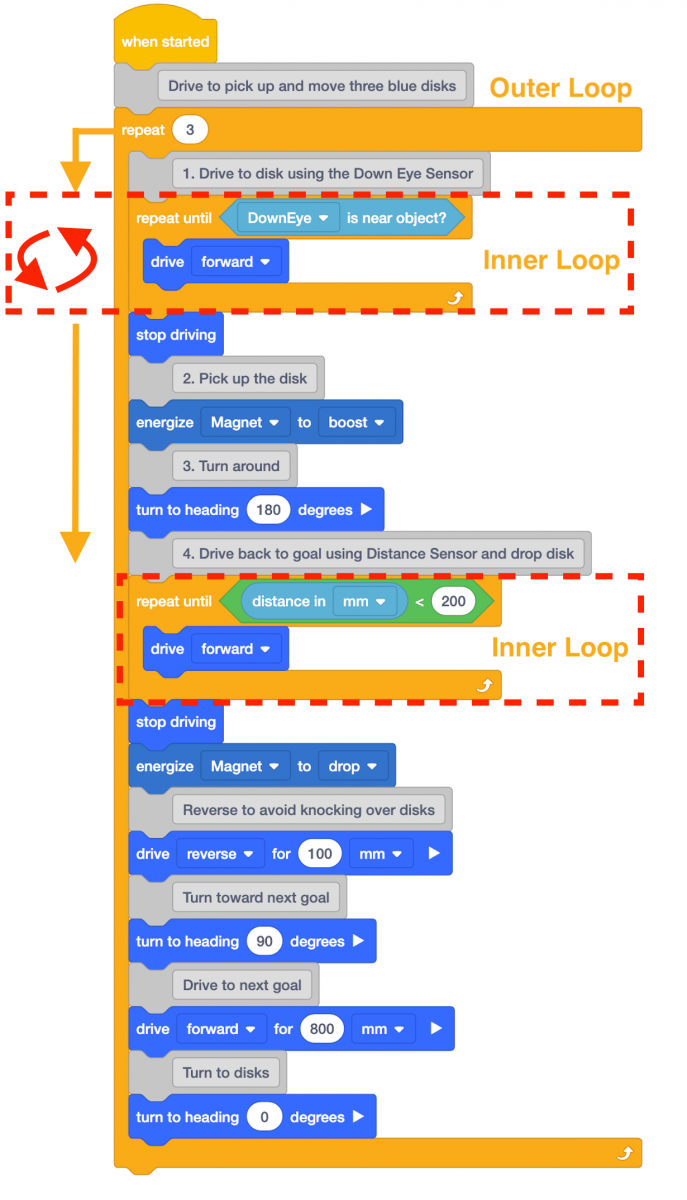
يستمر هذا حتى تبدأ الكتلة الثانية [Repeat until]. هذه هي الحلقة الداخلية الثانية.
-
ستتكرر الكتل داخل الحلقة الداخلية الثانية حتى يتم استيفاء حالة الكتلة. ثم ينفصل المشروع عن الحلقة الداخلية الثانية ويبدأ في التحرك عبر بقية الكتل داخل الحلقة الخارجية.
-
بمجرد اكتمال جميع الكتل في الحلقة الخارجية، يعود المشروع إلى بداية الحلقة الخارجية ويكرر العملية مرة أخرى.