레슨 4: 중첩 루프를 사용한 프로젝트 흐름
중첩된 루프를 사용하면 프로젝트 흐름이 지나치게 복잡해질 수 있습니다. 이 프로젝트는 외부 루프의 반복이나 조건을 확인한 다음 내부 루프를 시작하도록 트리거하는 것으로 시작합니다.
내부 루프는 모든 반복이 완료되거나 조건이 충족될 때까지 실행된 후 외부 루프로 돌아갑니다. 이 사이클은 외부 루프의 모든 반복이 완료되거나 외부 루프의 조건이 충족될 때까지 반복됩니다.
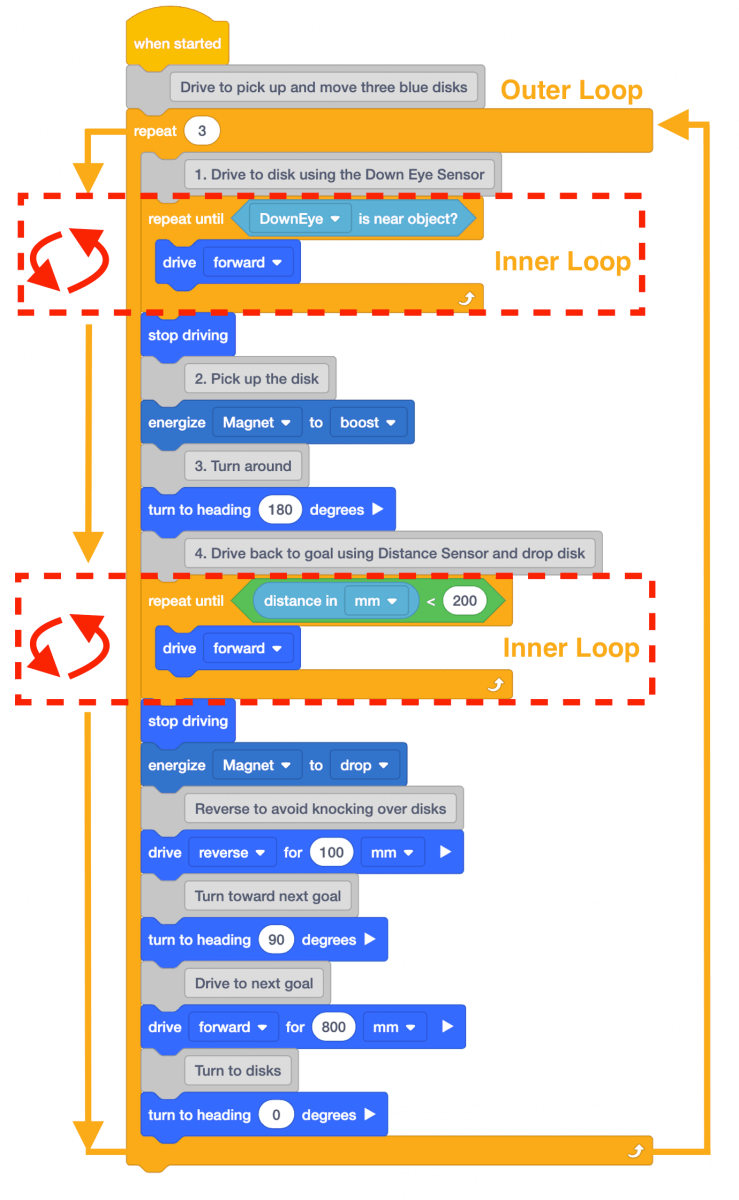
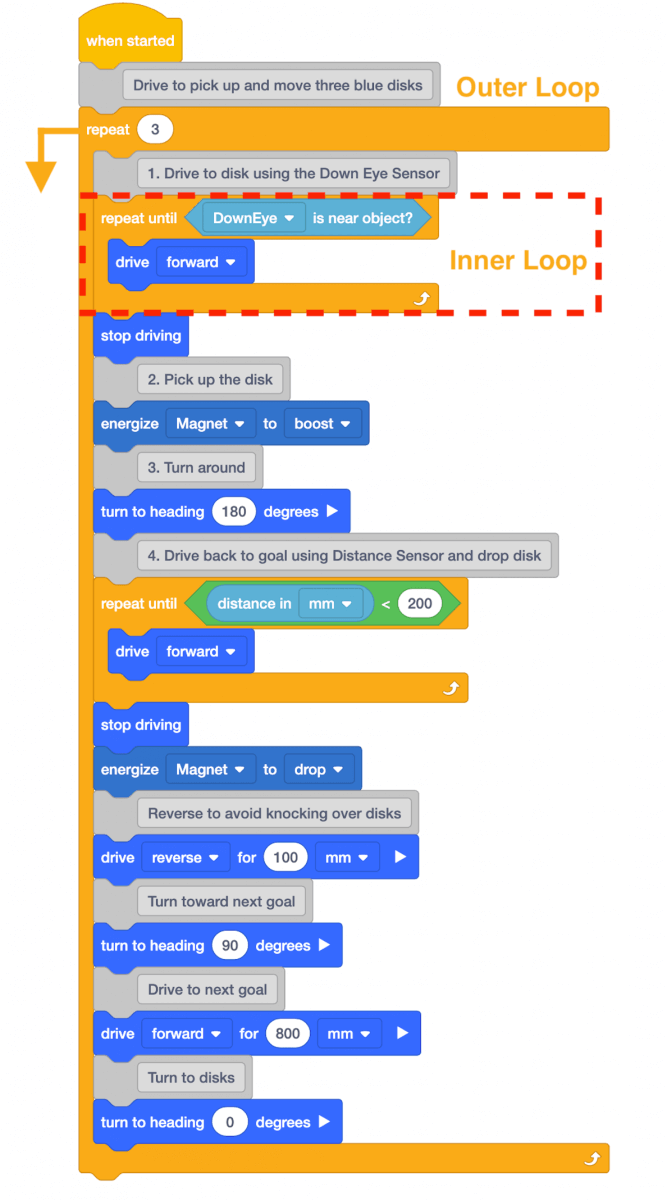
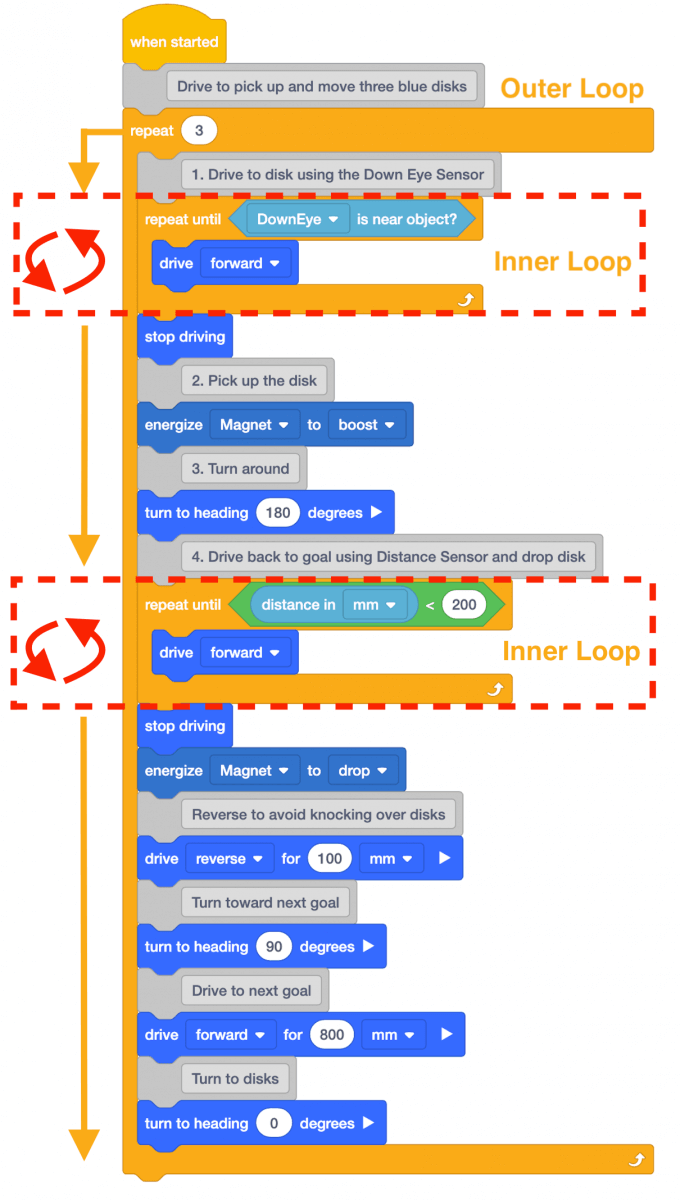
아래 예에서 프로젝트는 외부 루프의 첫 번째 반복을 시작하면서 시작됩니다. 이 경우, 바깥쪽 루프는 세 번 반복됩니다.
-
첫 번째 [반복] 블록은 첫 번째 내부 루프입니다.
-
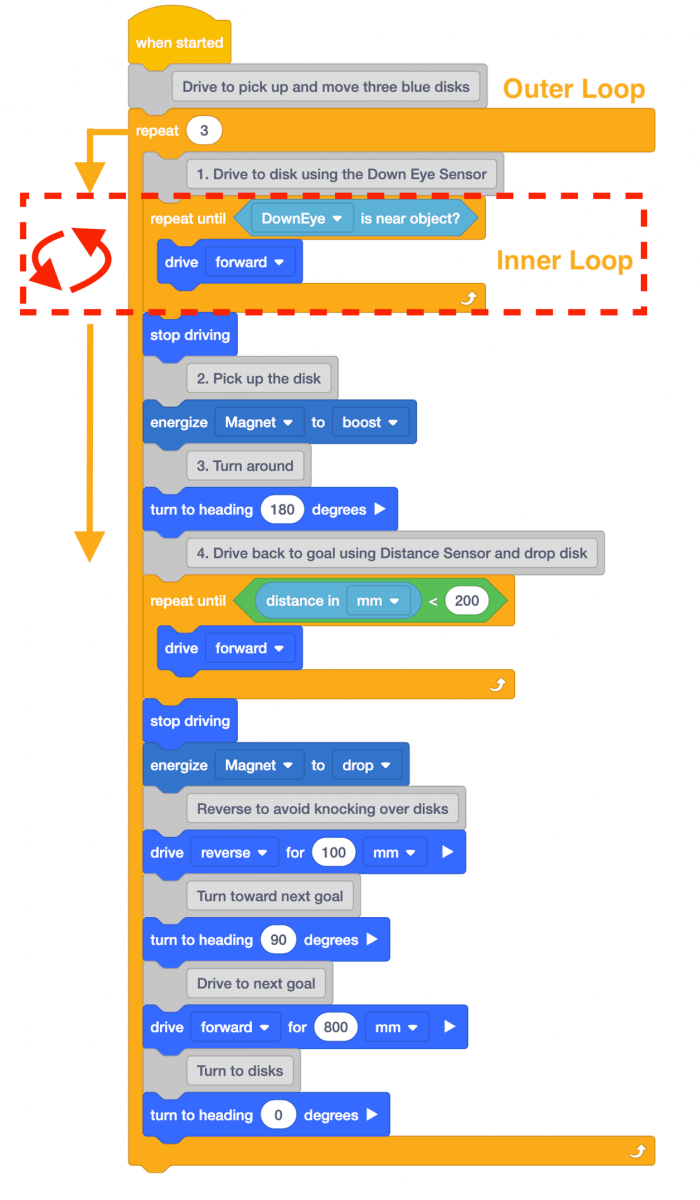
첫 번째 내부 루프는 조건이 TRUE로 보고될 때까지 실행됩니다. 그러면 프로젝트는 첫 번째 내부 루프에서 벗어나 외부 루프 내부의 나머지 블록을 따라 이동하기 시작합니다.
-
두 번째 [반복] 블록이 시작될 때까지 이 과정이 계속됩니다. 이것은 두 번째 내부 루프입니다.
-
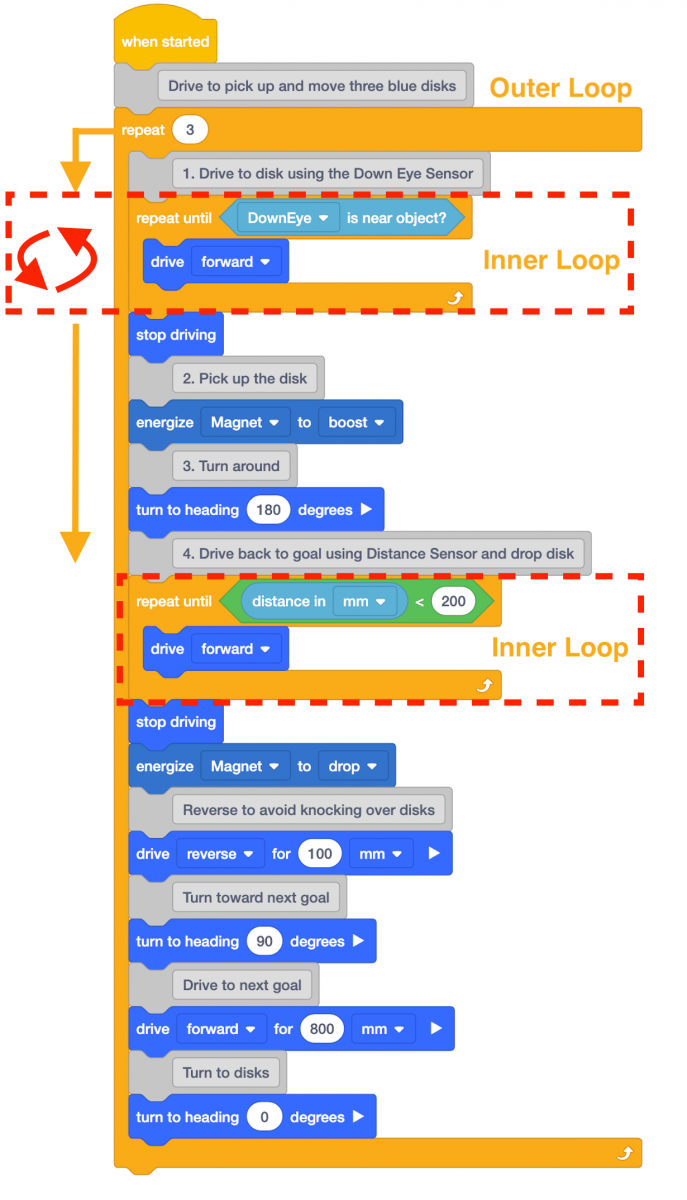
두 번째 내부 루프 내부의 블록은 블록의 조건이 충족될 때까지 반복됩니다. 그런 다음 프로젝트는 두 번째 내부 루프에서 벗어나 외부 루프 내부의 나머지 블록을 따라 이동하기 시작합니다.
-
외부 루프의 모든 블록이 완료되면 프로젝트는 외부 루프의 시작 부분으로 돌아가서 프로세스를 다시 반복합니다.