পাঠ ৪: নেস্টেড লুপ সহ প্রকল্প প্রবাহ
নেস্টেড লুপগুলির সাহায্যে, প্রকল্পের প্রবাহ অপ্রতিরোধ্য বলে মনে হতে পারে। প্রকল্পটি শুরু হয় বাইরের লুপের পুনরাবৃত্তি বা শর্তগুলি পরীক্ষা করে এবং তারপর ভিতরের লুপটি শুরু করার জন্য ট্রিগার করে।
বাইরের লুপে ফিরে আসার আগে সমস্ত পুনরাবৃত্তি সম্পন্ন না হওয়া বা শর্ত পূরণ না হওয়া পর্যন্ত ভিতরের লুপটি কার্যকর হয়। এই চক্রটি পুনরাবৃত্তি হয় যতক্ষণ না বাইরের লুপের সমস্ত পুনরাবৃত্তি সম্পন্ন হয় অথবা বাইরের লুপের অবস্থা পূরণ না হওয়া পর্যন্ত।
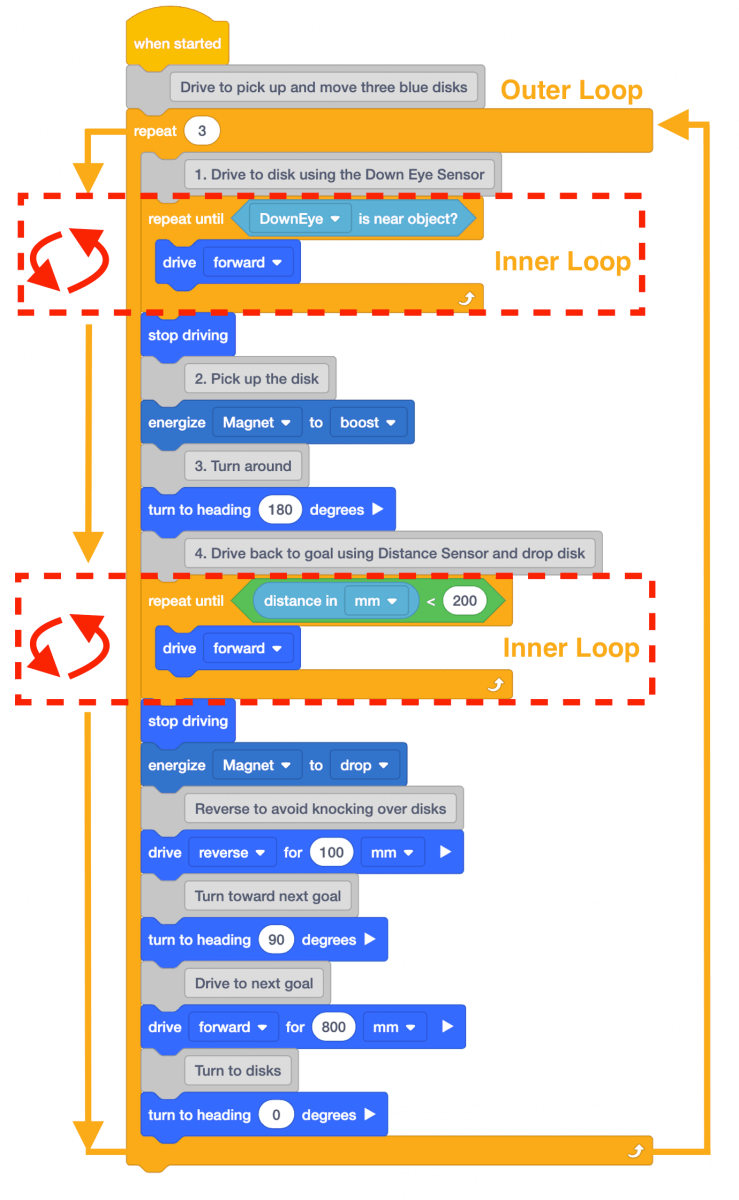
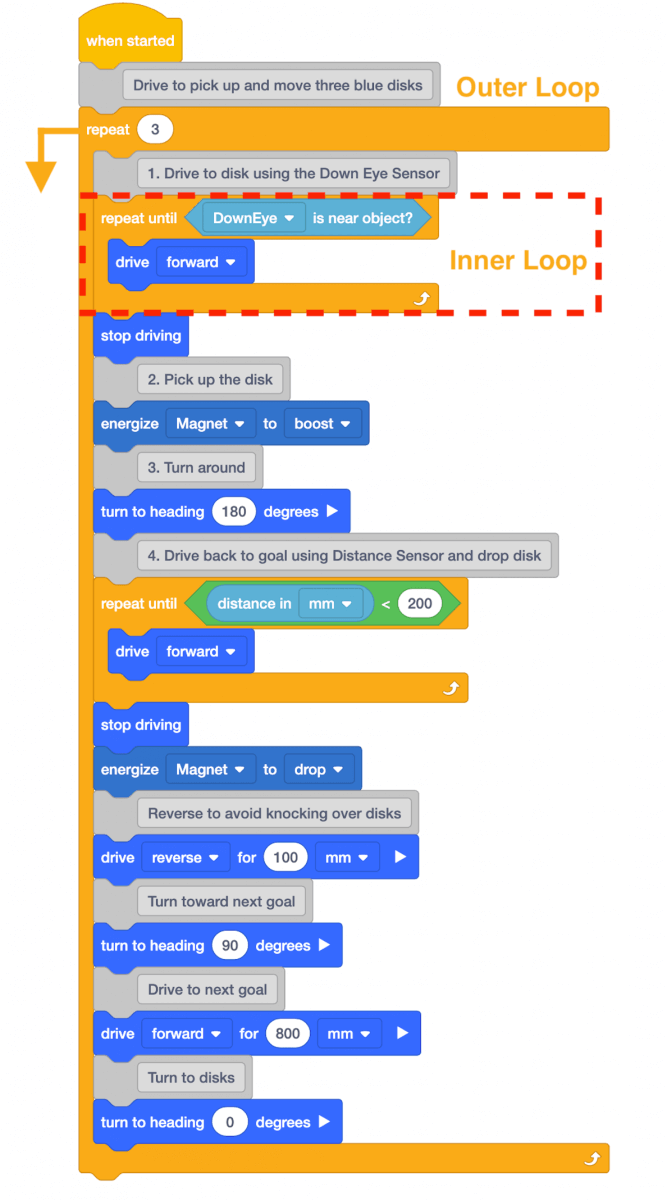
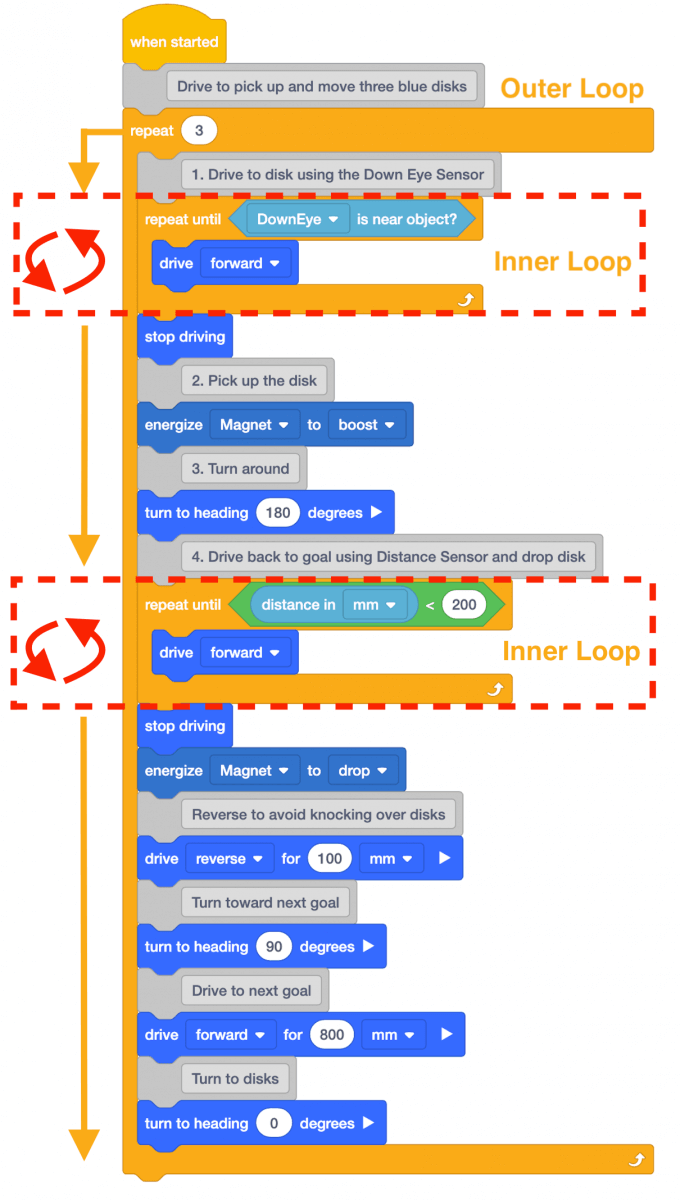
নিচের উদাহরণে, প্রকল্পটি বাইরের লুপের প্রথম পুনরাবৃত্তি শুরু করে শুরু হয়। এই ক্ষেত্রে, বাইরের লুপটি তিনবার পুনরাবৃত্তি হয়।
-
প্রথম [পর্যন্ত পুনরাবৃত্তি] ব্লক হল প্রথম অভ্যন্তরীণ লুপ।
-
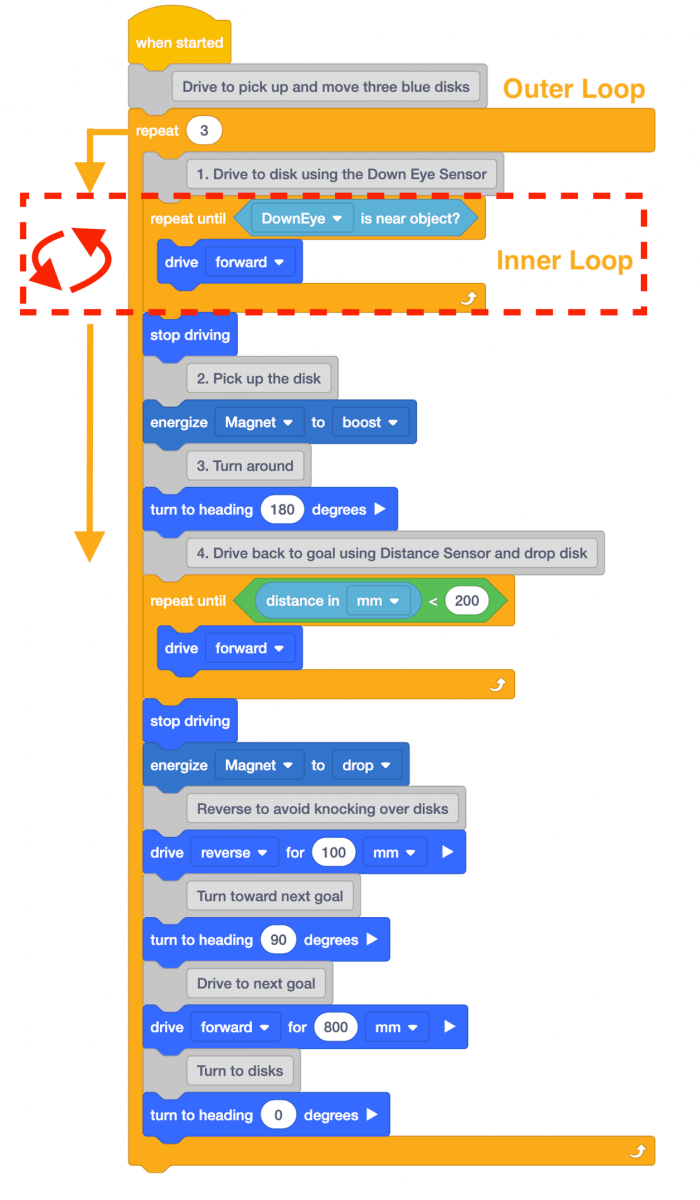
শর্তটি সত্য হিসাবে রিপোর্ট না হওয়া পর্যন্ত প্রথম অভ্যন্তরীণ লুপটি চলবে। তারপরে প্রকল্পটি প্রথম অভ্যন্তরীণ লুপ থেকে ভেঙে যাবে এবং বাইরের লুপের ভিতরের বাকি ব্লকগুলির মধ্য দিয়ে যেতে শুরু করবে।
-
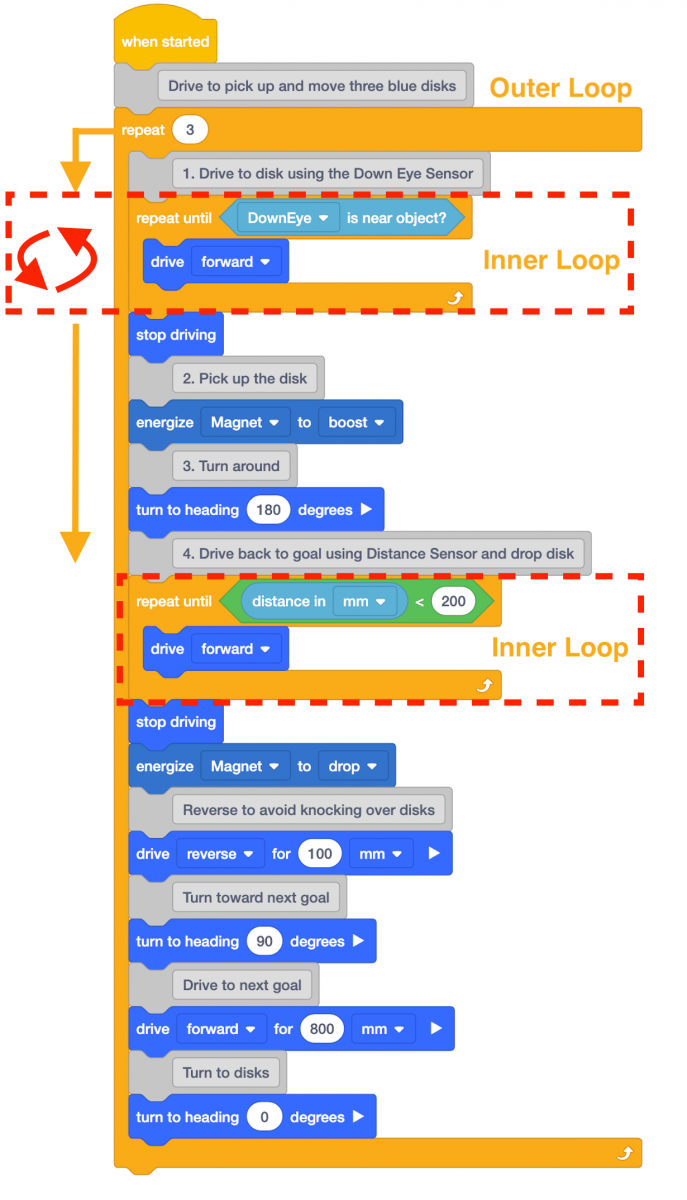
দ্বিতীয় [পুনরাবৃত্তি না করা পর্যন্ত] ব্লক শুরু না হওয়া পর্যন্ত এটি চলতে থাকে। এটি দ্বিতীয় অভ্যন্তরীণ লুপ।
-
ব্লকের শর্ত পূরণ না হওয়া পর্যন্ত দ্বিতীয় অভ্যন্তরীণ লুপের ভিতরের ব্লকগুলি পুনরাবৃত্তি হবে। তারপরে প্রকল্পটি দ্বিতীয় অভ্যন্তরীণ লুপ থেকে বিরতি দেবে এবং বাইরের লুপের ভিতরের বাকি ব্লকগুলির মধ্য দিয়ে যেতে শুরু করবে।
-
একবার বাইরের লুপের সমস্ত ব্লক সম্পূর্ণ হয়ে গেলে, প্রকল্পটি বাইরের লুপের শুরুতে ফিরে যায় এবং প্রক্রিয়াটি আবার পুনরাবৃত্তি করে।