
Lektion 4: Projektablauf mit verschachtelten Schleifen
Bei verschachtelten Schleifen kann der Projektablauf überwältigend erscheinen. Das Projekt beginnt mit der Überprüfung der Wiederholungen oder Bedingungen der äußeren Schleife und dem anschließenden Auslösen des Beginns der inneren Schleife.
Die innere Schleife wird ausgeführt, bis alle Wiederholungen abgeschlossen sind oder die Bedingung erfüllt ist, bevor sie zur äußeren Schleife zurückkehrt. Dieser Zyklus wiederholt sich, bis alle Wiederholungen der äußeren Schleife abgeschlossen sind oder bis die Bedingung der äußeren Schleife erfüllt ist.
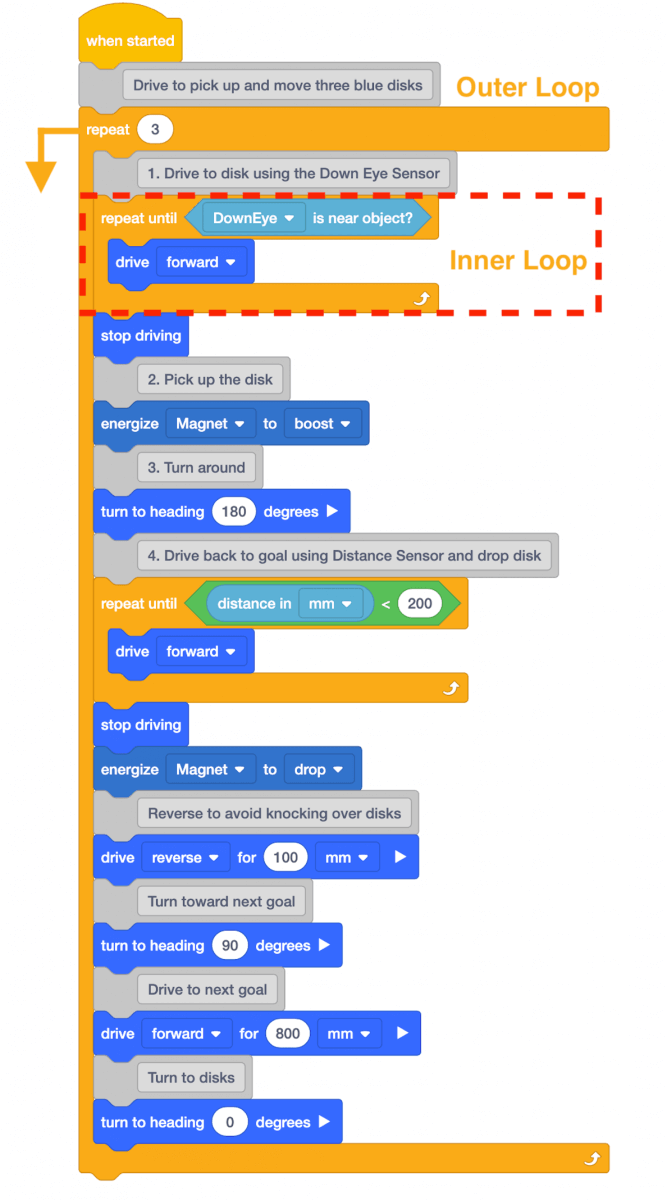
Im folgenden Beispiel beginnt das Projekt mit der ersten Wiederholung der äußeren Schleife. In diesem Fall wiederholt sich die äußere Schleife dreimal.
-
Der erste [Wiederholen bis] -Block ist die erste innere Schleife.
-
Die erste innere Schleife läuft, bis die Bedingung als WAHR gemeldet wird. Das Projekt bricht dann von der ersten inneren Schleife ab und beginnt, sich durch den Rest der Blöcke innerhalb der äußeren Schleife zu bewegen.

-
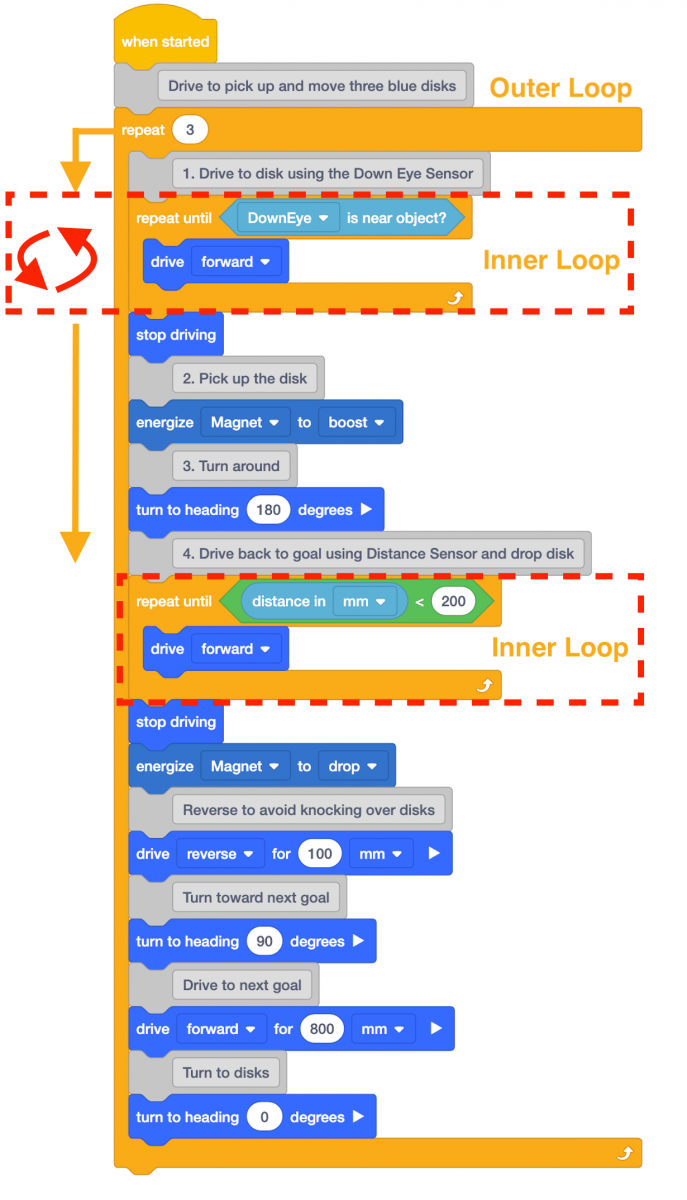
Dies wird fortgesetzt, bis der zweite [Wiederholen bis] -Block beginnt. Dies ist die zweite innere Schleife.
-
Die Blöcke innerhalb der zweiten inneren Schleife werden wiederholt, bis die Bedingung des Blocks erfüllt ist. Das Projekt bricht dann von der zweiten inneren Schleife ab und beginnt, sich durch den Rest der Blöcke innerhalb der äußeren Schleife zu bewegen.

-
Sobald alle Blöcke in der äußeren Schleife abgeschlossen sind, geht das Projekt zurück zum Anfang der äußeren Schleife und wiederholt den Vorgang erneut.

Fragen
Bitte wählen Sie unten einen Link aus, um auf das Lektionsquiz zuzugreifen.
Google Doc / .docx / .pdf