
പാഠം 4: നെസ്റ്റഡ് ലൂപ്പുകളുള്ള പ്രോജക്റ്റ് ഫ്ലോ
നെസ്റ്റഡ് ലൂപ്പുകൾ ഉള്ളപ്പോൾ, പ്രോജക്റ്റ് ഒഴുക്ക് അമിതമായി തോന്നാം. പുറം ലൂപ്പിന്റെ ആവർത്തനങ്ങളോ അവസ്ഥകളോ പരിശോധിച്ച്, ആന്തരിക ലൂപ്പ് ആരംഭിക്കുന്നതിനായി ട്രിഗർ ചെയ്തുകൊണ്ടാണ് പ്രോജക്റ്റ് ആരംഭിക്കുന്നത്.
എല്ലാ ആവർത്തനങ്ങളും പൂർത്തിയാകുന്നതുവരെ അല്ലെങ്കിൽ വ്യവസ്ഥ പാലിക്കുന്നതുവരെ ആന്തരിക ലൂപ്പ് എക്സിക്യൂട്ട് ചെയ്യുന്നു, തുടർന്ന് പുറം ലൂപ്പിലേക്ക് മടങ്ങുന്നു. പുറം ലൂപ്പിന്റെ എല്ലാ ആവർത്തനങ്ങളും പൂർത്തിയാകുന്നതുവരെ അല്ലെങ്കിൽ പുറം ലൂപ്പിന്റെ അവസ്ഥ പാലിക്കുന്നതുവരെ ഈ ചക്രം ആവർത്തിക്കുന്നു.
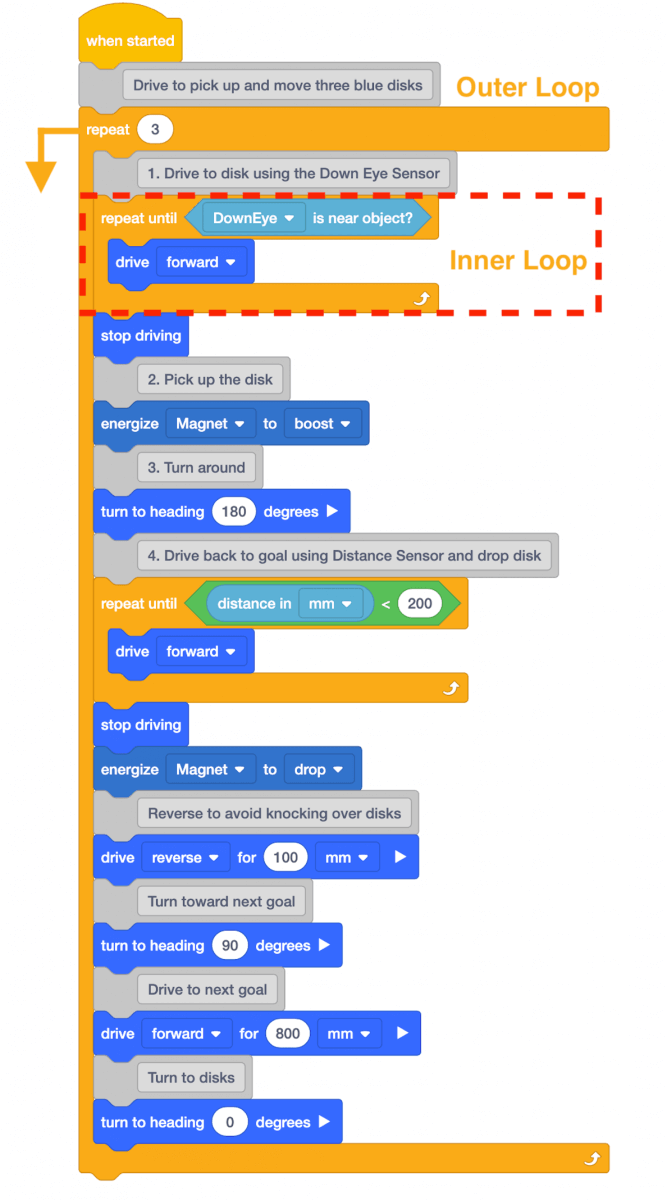
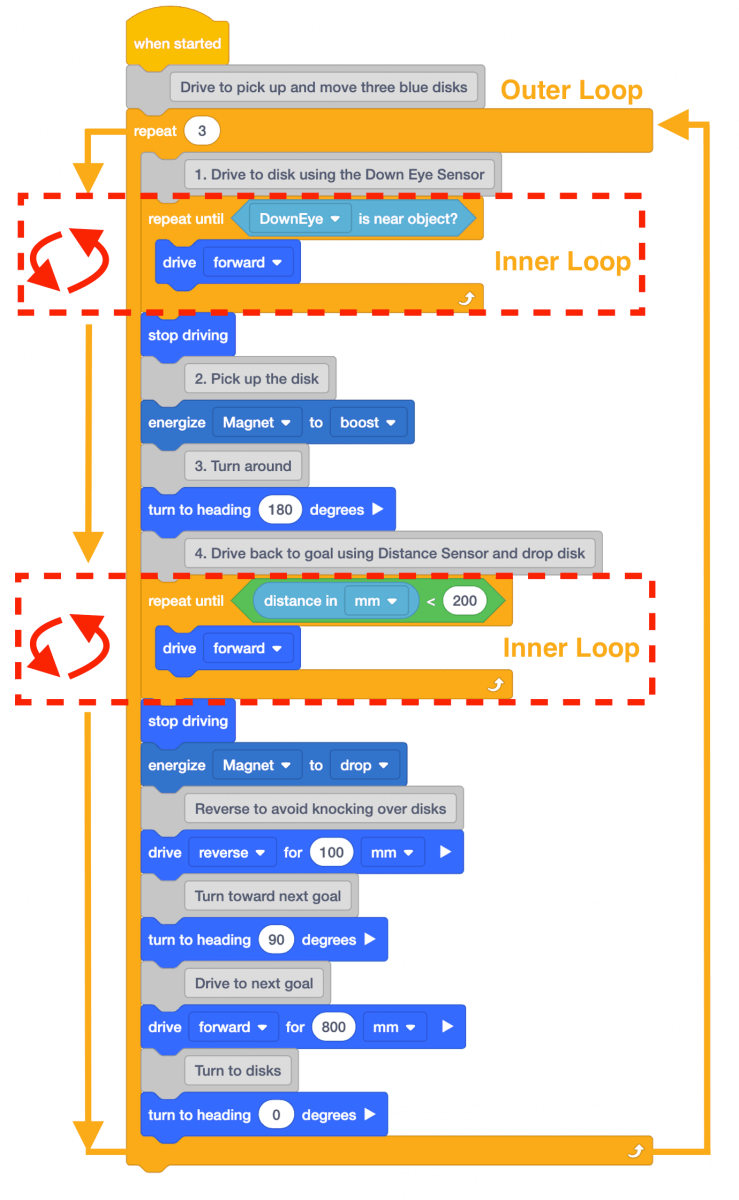
താഴെയുള്ള ഉദാഹരണത്തിൽ, പുറം ലൂപ്പിന്റെ ആദ്യ ആവർത്തനം ആരംഭിച്ചുകൊണ്ട് പ്രോജക്റ്റ് ആരംഭിക്കുന്നു. ഈ സാഹചര്യത്തിൽ, പുറം ലൂപ്പ് മൂന്ന് തവണ ആവർത്തിക്കുന്നു.
-
ആദ്യത്തെ [Repeat until] ബ്ലോക്ക് ആദ്യത്തെ ആന്തരിക ലൂപ്പ് ആണ്.
-
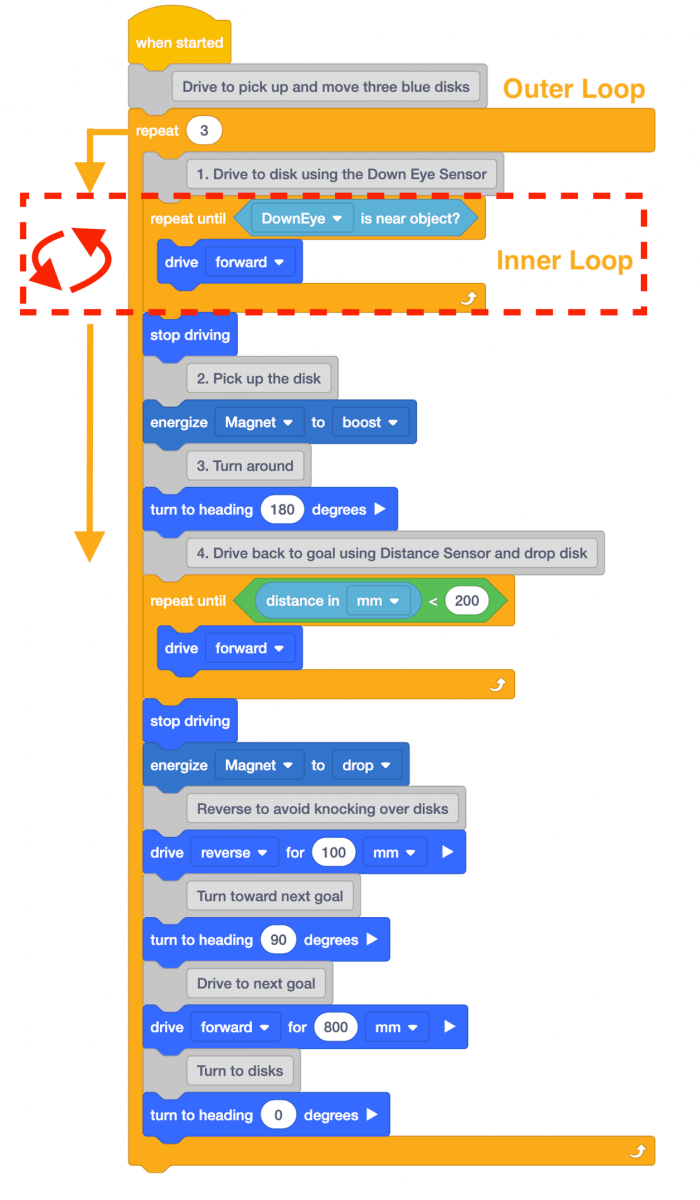
കണ്ടീഷൻ TRUE ആയി റിപ്പോർട്ട് ചെയ്യപ്പെടുന്നതുവരെ ആദ്യത്തെ ആന്തരിക ലൂപ്പ് പ്രവർത്തിക്കും. തുടർന്ന് പ്രോജക്റ്റ് ആദ്യത്തെ ആന്തരിക ലൂപ്പിൽ നിന്ന് വേർപെട്ട് പുറം ലൂപ്പിനുള്ളിലെ ബാക്കി ബ്ലോക്കുകളിലൂടെ നീങ്ങാൻ തുടങ്ങും.
-
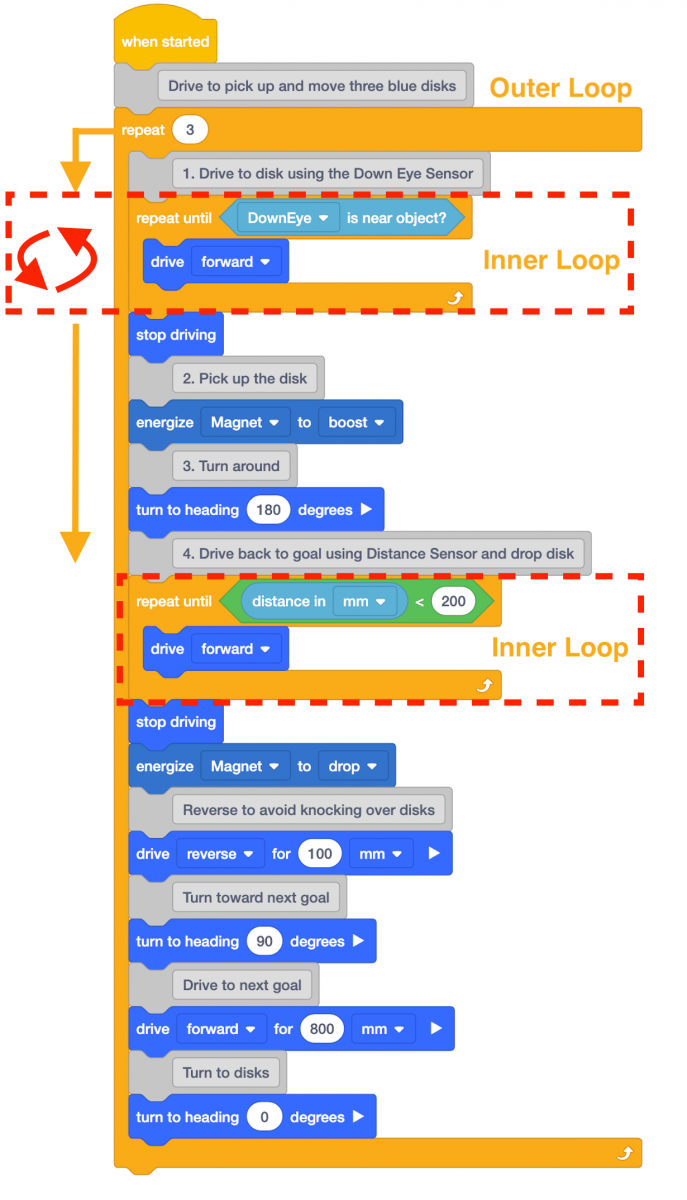
രണ്ടാമത്തെ [Repeat until] ബ്ലോക്ക് ആരംഭിക്കുന്നത് വരെ ഇത് തുടരും. ഇത് രണ്ടാമത്തെ ആന്തരിക ലൂപ്പാണ്.
-
ബ്ലോക്കിന്റെ അവസ്ഥ പാലിക്കുന്നതുവരെ രണ്ടാമത്തെ ഇന്നർ ലൂപ്പിനുള്ളിലെ ബ്ലോക്കുകൾ ആവർത്തിക്കും. തുടർന്ന് പ്രോജക്റ്റ് രണ്ടാമത്തെ ആന്തരിക ലൂപ്പിൽ നിന്ന് വേർപെട്ട് പുറം ലൂപ്പിനുള്ളിലെ ബാക്കി ബ്ലോക്കുകളിലൂടെ നീങ്ങാൻ തുടങ്ങും.
-
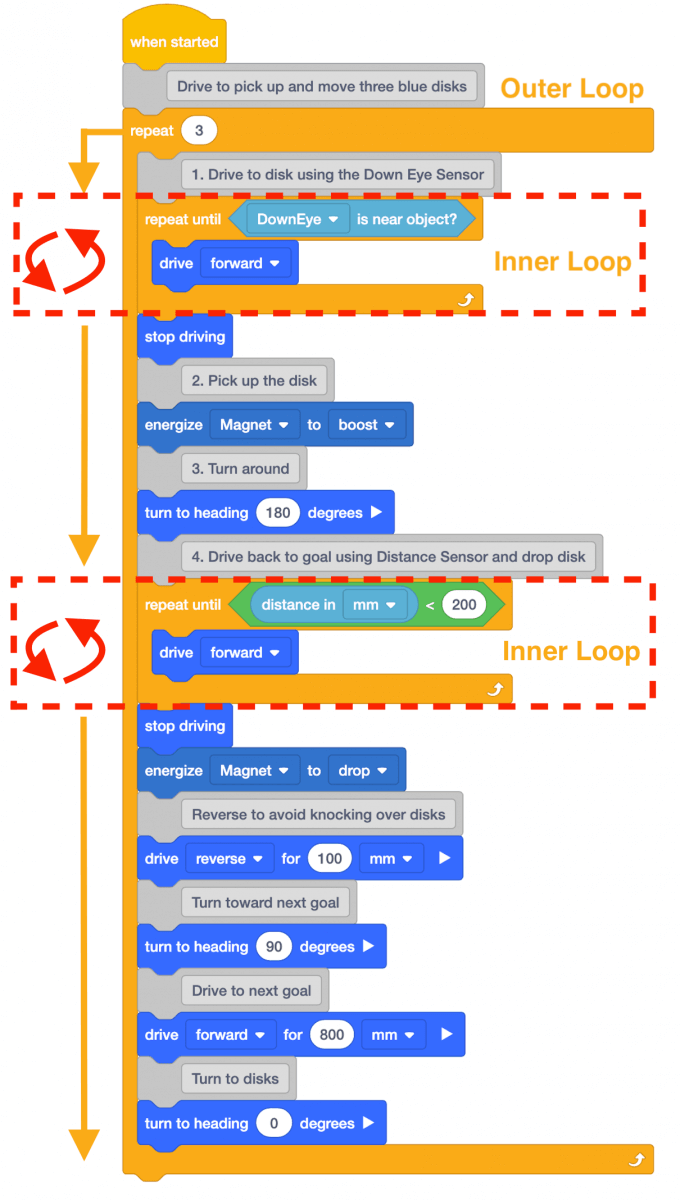
പുറം ലൂപ്പിലെ എല്ലാ ബ്ലോക്കുകളും പൂർത്തിയായിക്കഴിഞ്ഞാൽ, പ്രോജക്റ്റ് പുറം ലൂപ്പിന്റെ തുടക്കത്തിലേക്ക് തിരികെ പോയി പ്രക്രിയ വീണ്ടും ആവർത്തിക്കുന്നു.
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.