Bài 4: Luồng dự án với các vòng lặp lồng nhau
Với các vòng lặp lồng nhau, luồng dự án có thể trở nên quá tải. Dự án bắt đầu bằng cách kiểm tra các lần lặp lại hoặc điều kiện của vòng lặp bên ngoài, sau đó kích hoạt vòng lặp bên trong để bắt đầu.
Vòng lặp bên trong thực thi cho đến khi tất cả các lần lặp lại được hoàn thành hoặc điều kiện được đáp ứng trước khi quay trở lại vòng lặp bên ngoài. Chu trình này lặp lại cho đến khi tất cả các lần lặp lại của vòng lặp ngoài được hoàn thành hoặc cho đến khi điều kiện của vòng lặp ngoài được đáp ứng.
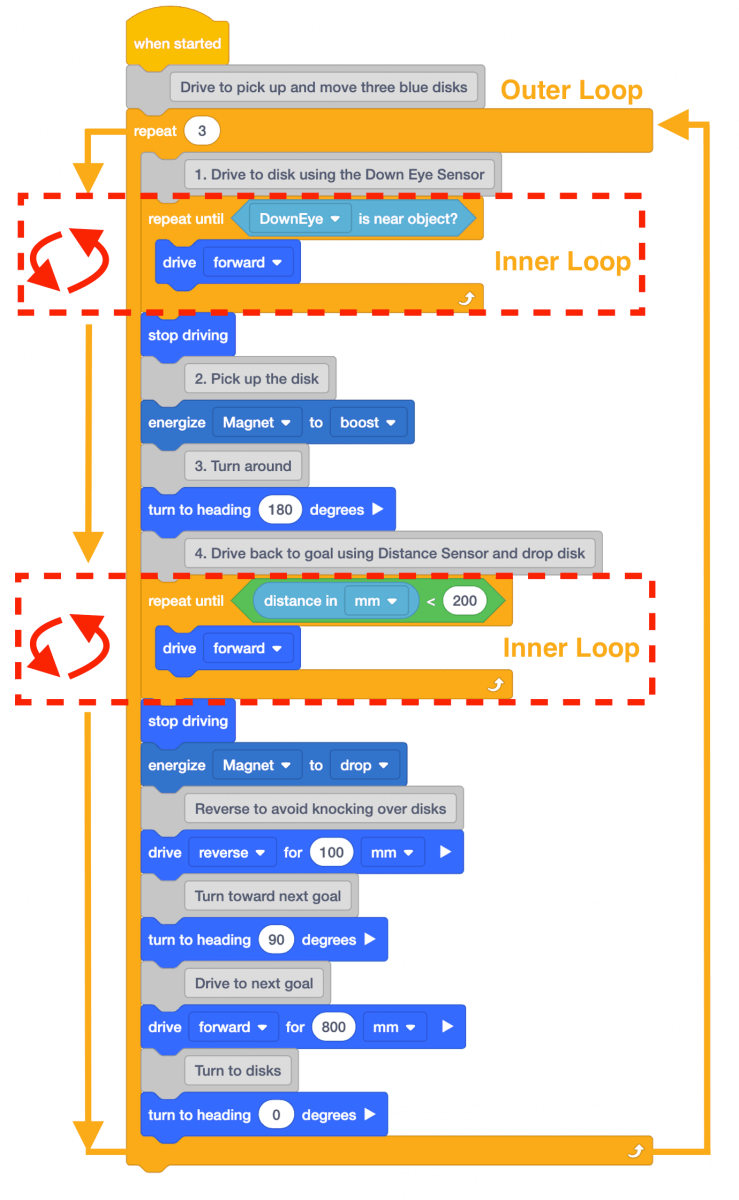
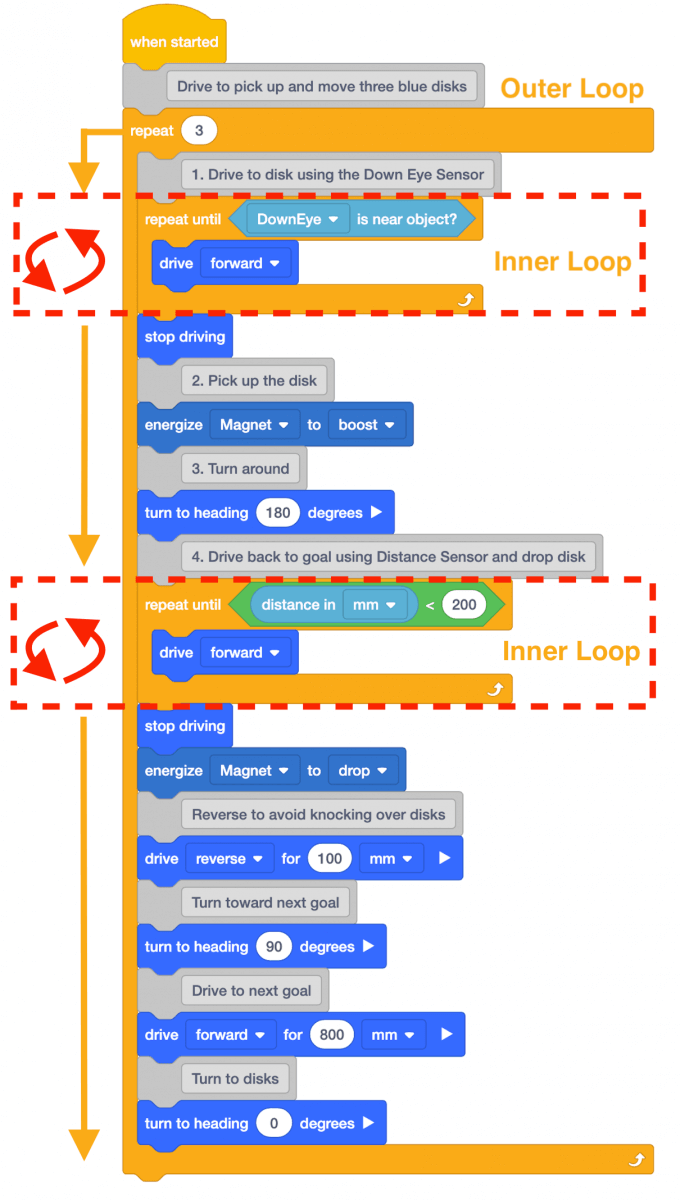
Trong ví dụ dưới đây, dự án bắt đầu bằng việc lặp lại lần đầu tiên của vòng lặp bên ngoài. Trong trường hợp này, vòng lặp bên ngoài lặp lại ba lần.
-
Khối [Lặp lại cho đến] đầu tiên là vòng lặp bên trong đầu tiên.
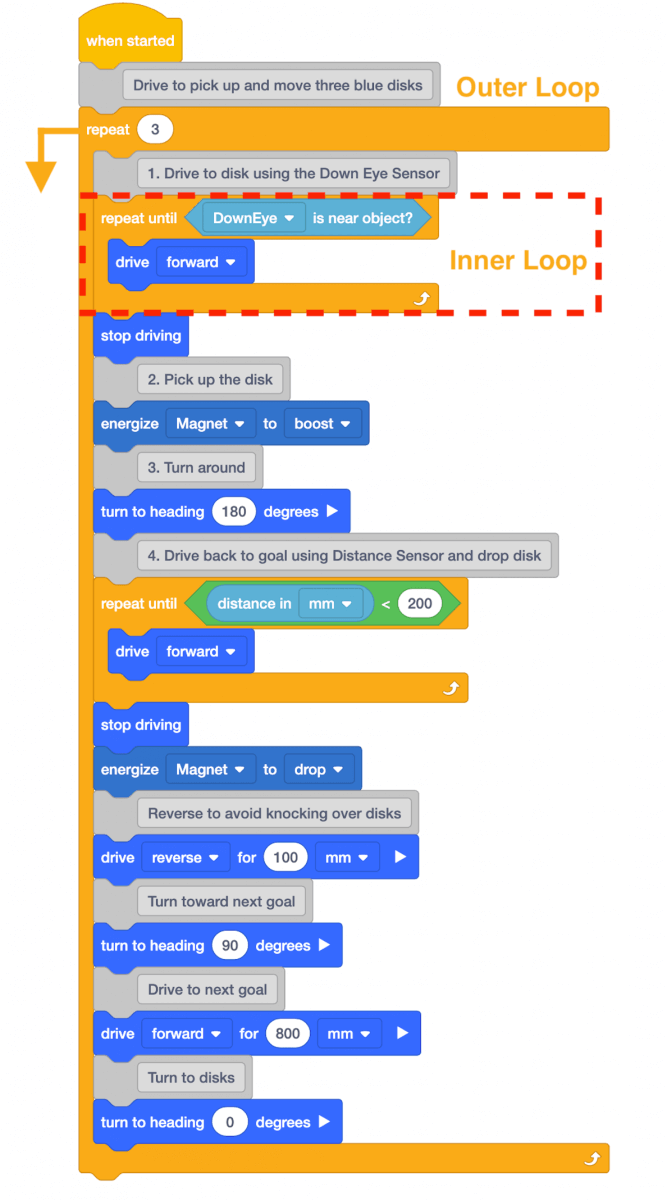
-
Vòng lặp bên trong đầu tiên sẽ chạy cho đến khi điều kiện được báo cáo là ĐÚNG. Sau đó, dự án sẽ thoát khỏi vòng lặp bên trong đầu tiên và bắt đầu di chuyển qua các khối còn lại bên trong vòng lặp bên ngoài.
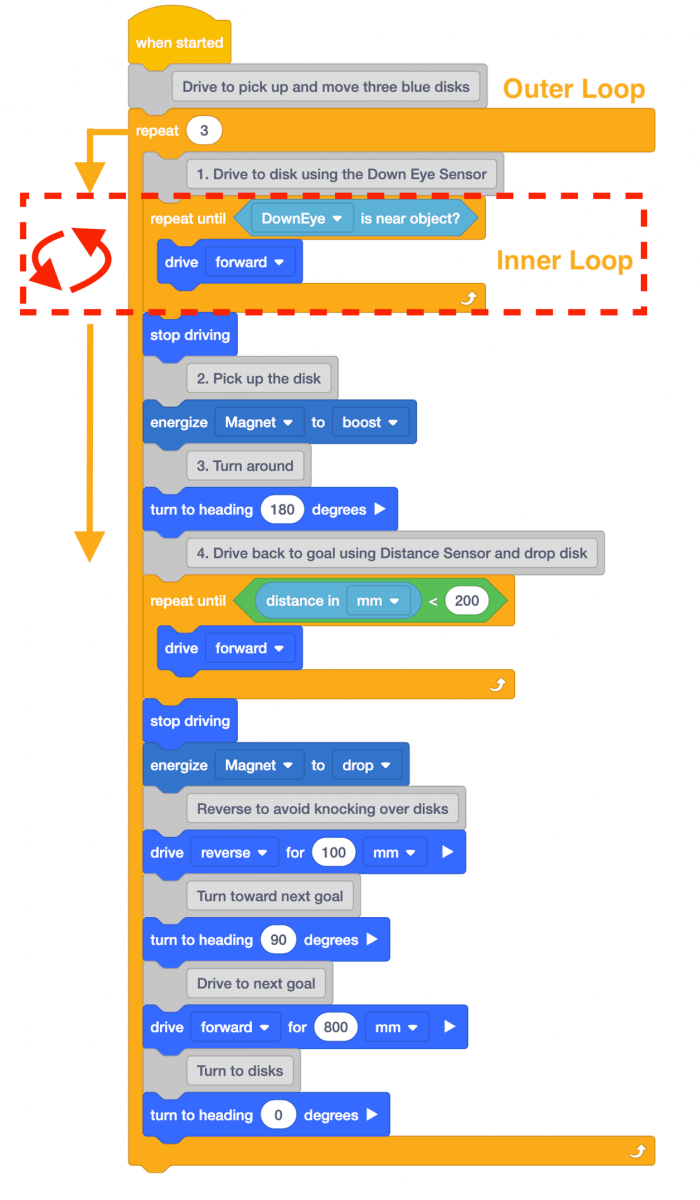
-
Quá trình này tiếp tục cho đến khi khối [Lặp lại cho đến khi] thứ hai bắt đầu. Đây là vòng lặp bên trong thứ hai.
-
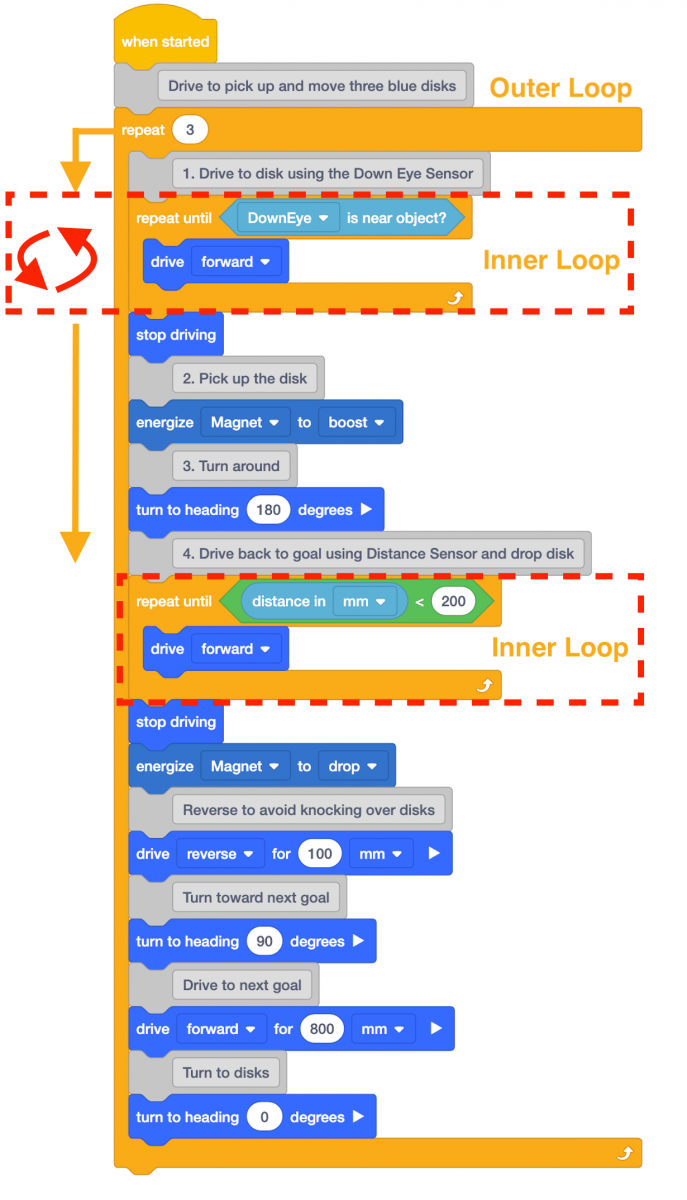
Các khối bên trong vòng lặp thứ hai sẽ lặp lại cho đến khi điều kiện của khối được đáp ứng. Sau đó, dự án sẽ thoát khỏi vòng lặp bên trong thứ hai và bắt đầu di chuyển qua các khối còn lại bên trong vòng lặp bên ngoài.
-
Khi tất cả các khối trong vòng lặp ngoài hoàn tất, dự án sẽ quay lại điểm đầu của vòng lặp ngoài và lặp lại quy trình một lần nữa.