पाठ 4: नेस्टेड लूप्स के साथ प्रोजेक्ट प्रवाह
नेस्टेड लूप्स के साथ, परियोजना का प्रवाह भारी लग सकता है। परियोजना बाहरी लूप की पुनरावृत्तियों या शर्तों की जांच करके और फिर आंतरिक लूप को शुरू करने के लिए ट्रिगर करके शुरू होती है। आंतरिक लूप
तक निष्पादित होता है जब तक कि सभी पुनरावृत्तियां पूरी नहीं हो जाती हैं या शर्त पूरी नहीं हो जाती है, उसके बाद बाहरी लूप पर वापस लौट जाता है। यह चक्र तब तक दोहराया जाता है जब तक कि बाहरी लूप की सभी पुनरावृत्तियां पूरी नहीं हो जातीं या बाहरी लूप की शर्त पूरी नहीं हो जाती।
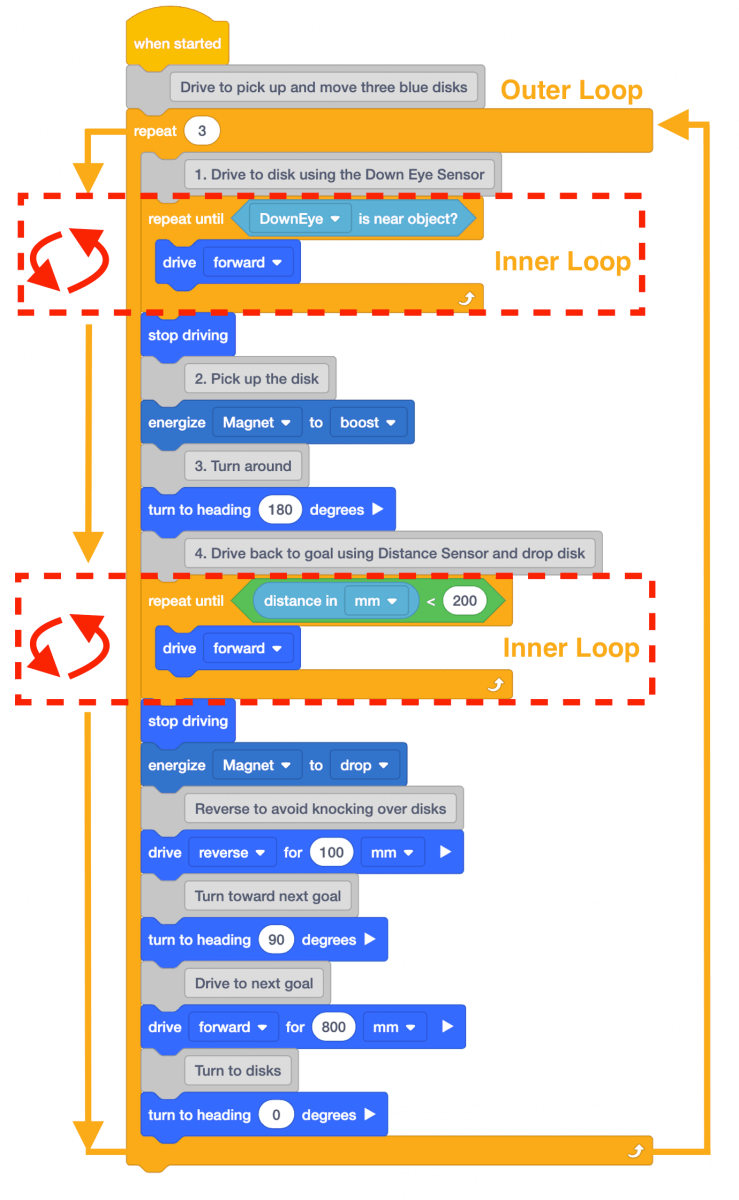
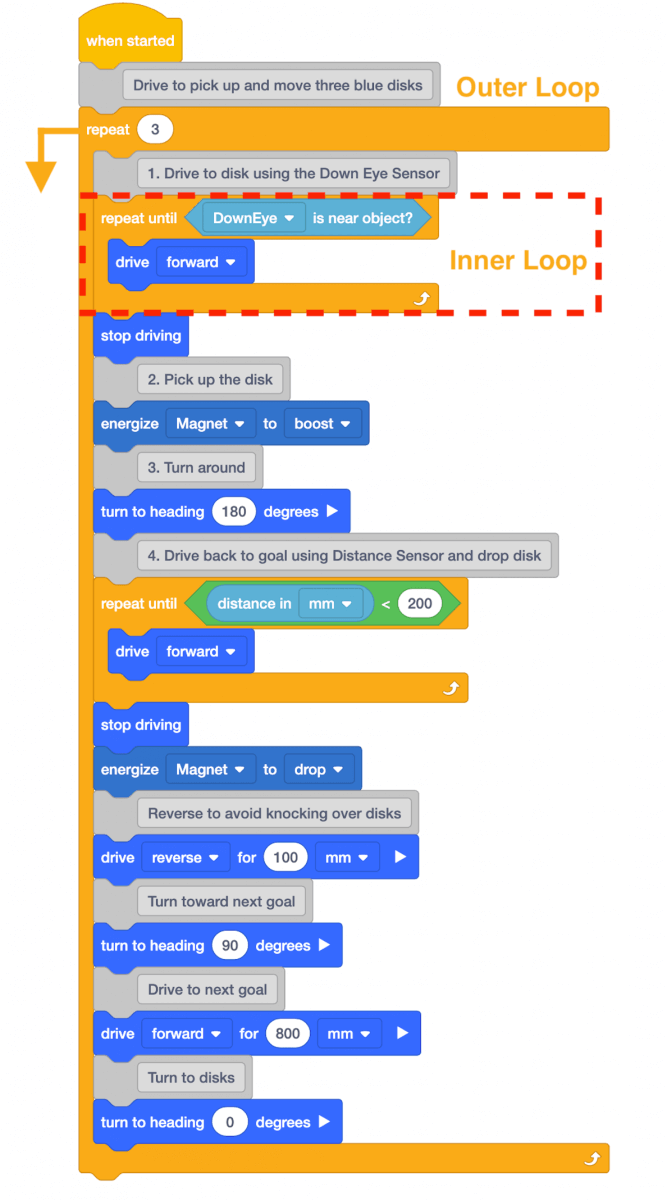
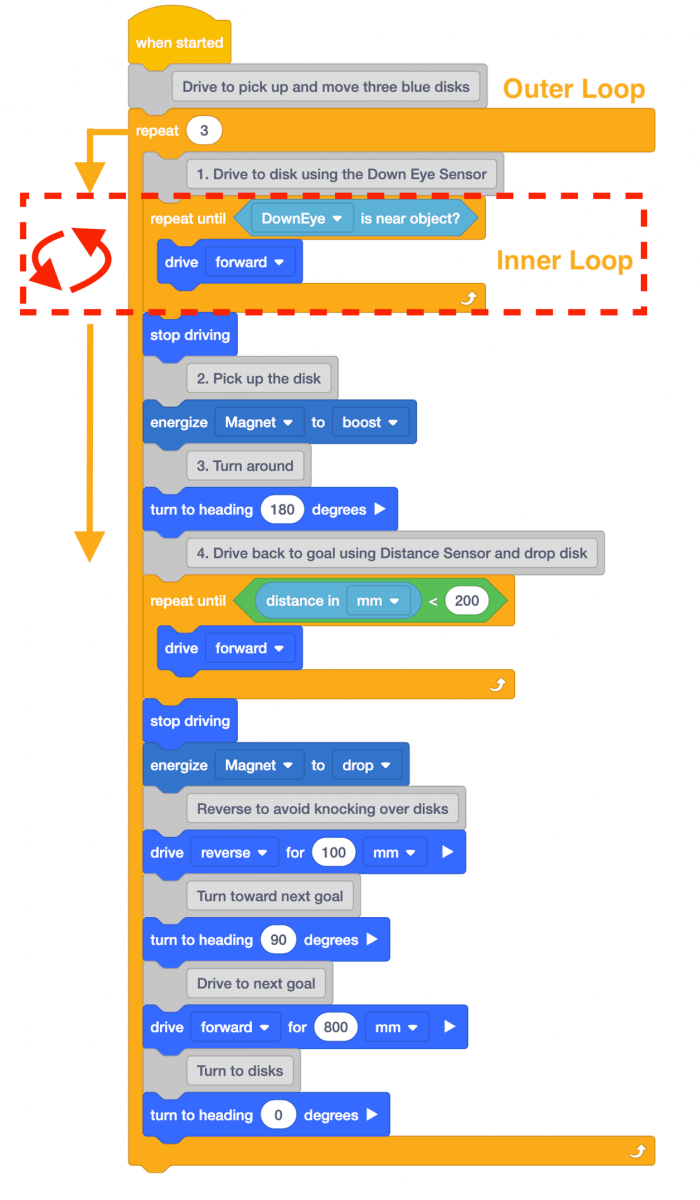
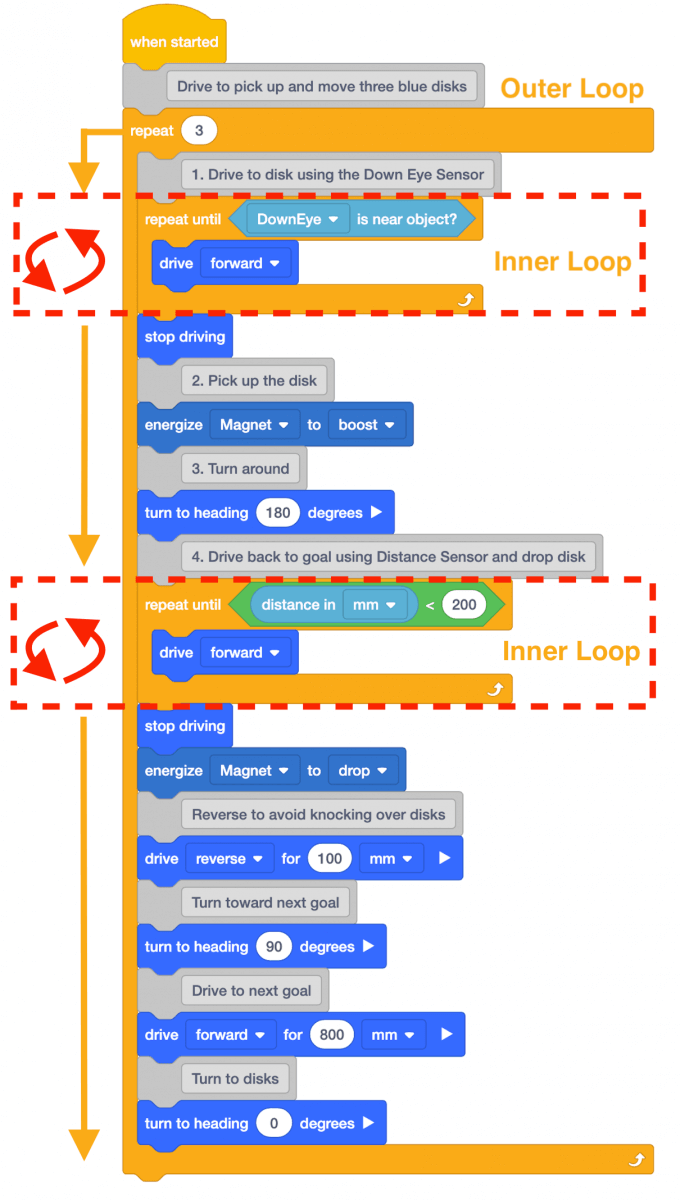
नीचे दिए गए उदाहरण में, परियोजना बाहरी लूप की पहली पुनरावृत्ति शुरू करके शुरू होती है। इस स्थिति में, बाहरी लूप तीन बार दोहराया जाता है।
-
पहला [Repeat until] ब्लॉक पहला आंतरिक लूप है।
-
पहला आंतरिक लूप तब तक चलेगा जब तक कि स्थिति TRUE के रूप में रिपोर्ट न की जाए। इसके बाद परियोजना पहले आंतरिक लूप से अलग हो जाएगी और बाहरी लूप के अंदर शेष ब्लॉकों से होकर आगे बढ़ना शुरू कर देगी।
-
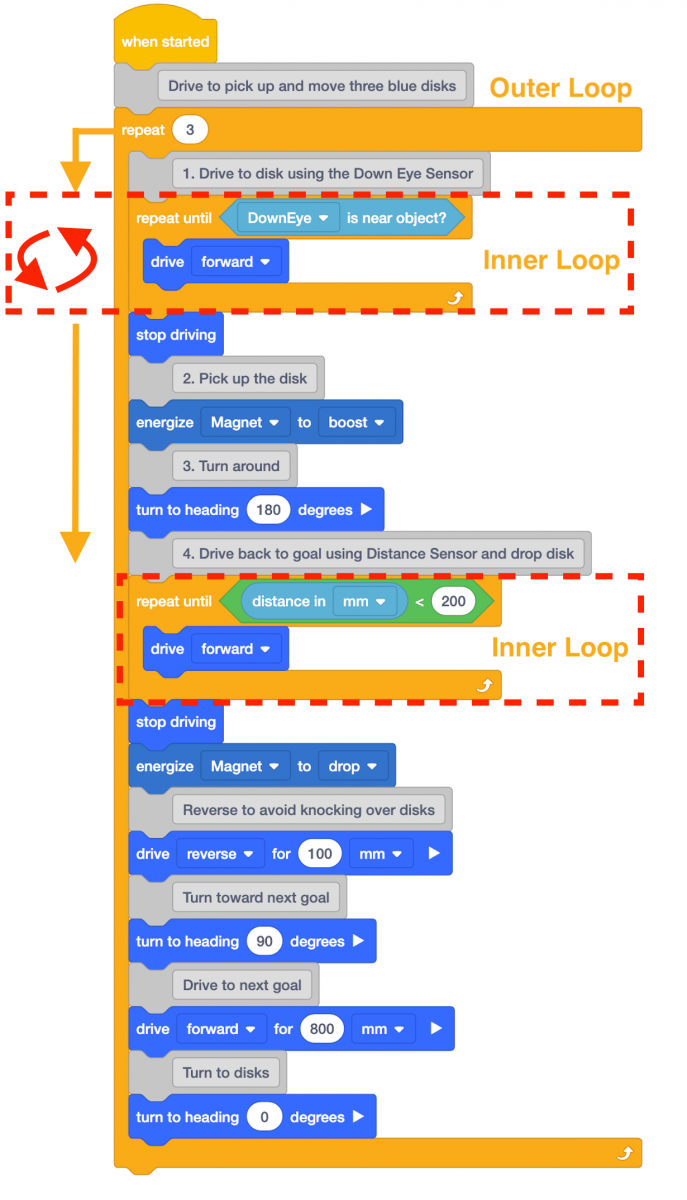
यह तब तक जारी रहता है जब तक कि दूसरा [दोहराएँ जब तक] ब्लॉक शुरू न हो जाए। यह दूसरा आंतरिक लूप है।
-
दूसरे आंतरिक लूप के अंदर के ब्लॉक तब तक दोहराए जाएंगे जब तक कि ब्लॉक की शर्त पूरी नहीं हो जाती। इसके बाद परियोजना दूसरे आंतरिक लूप से अलग हो जाएगी और बाहरी लूप के अंदर शेष ब्लॉकों से होकर आगे बढ़ना शुरू कर देगी।
-
जब बाहरी लूप के सभी ब्लॉक पूरे हो जाते हैं, तो परियोजना बाहरी लूप के आरंभ में वापस चली जाती है और प्रक्रिया को पुनः दोहराती है।