
Lección 4: Flujo del proyecto con bucles anidados
Con bucles anidados, el flujo del proyecto puede parecer abrumador. El proyecto comienza verificando las repeticiones o condiciones del bucle exterior y luego activando el bucle interior para comenzar.
El bucle interno se ejecuta hasta que se completan todas las repeticiones o se cumple la condición, antes de volver al bucle externo. Este ciclo se repite hasta que se completen todas las repeticiones del bucle exterior o hasta que se cumpla la condición del bucle exterior.
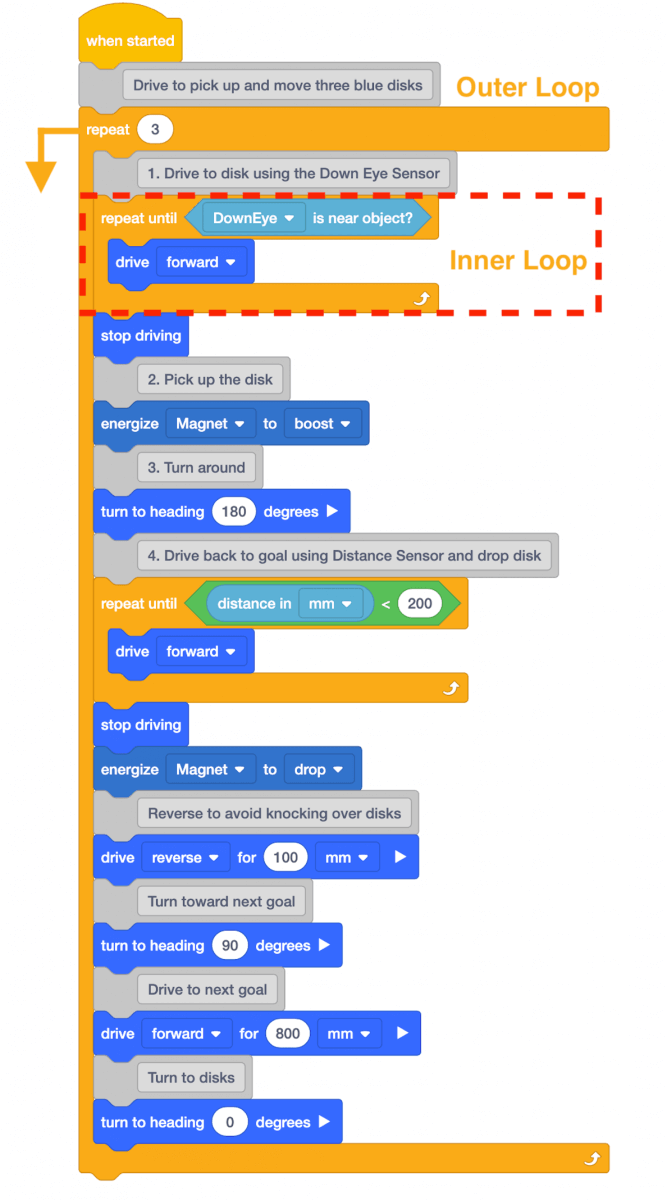
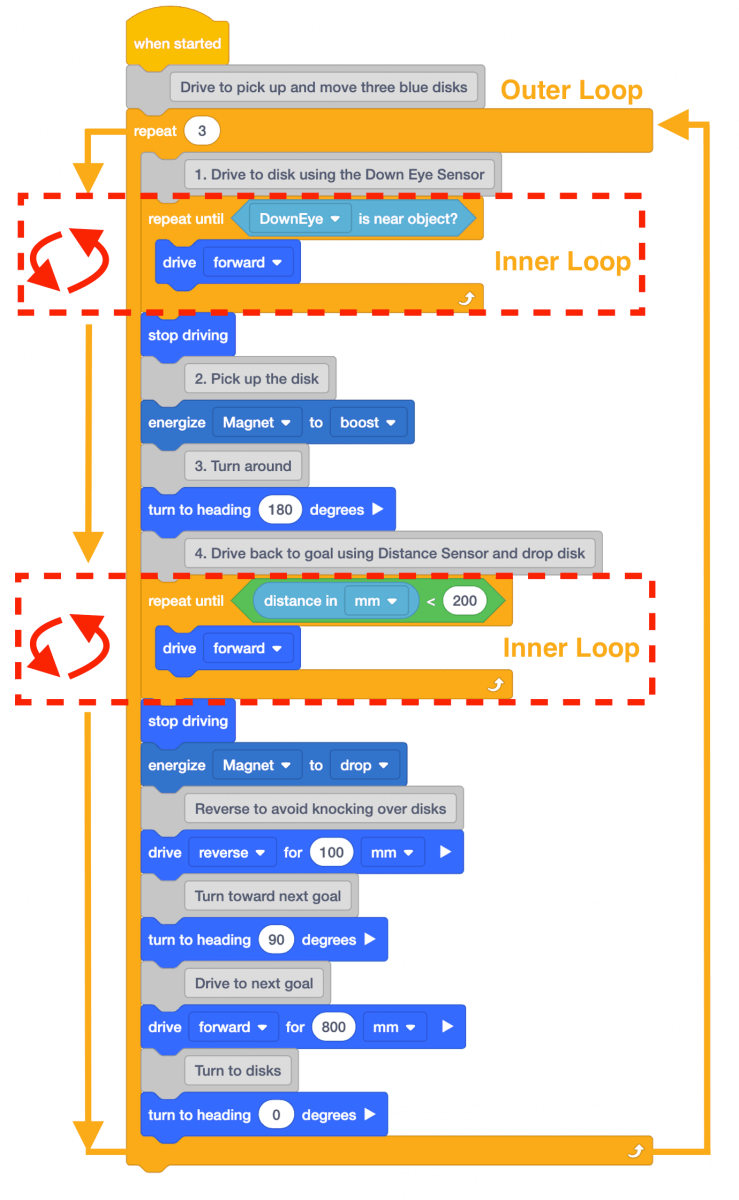
En el siguiente ejemplo, el proyecto comienza iniciando la primera repetición del bucle exterior. En este caso, el bucle exterior se repite tres veces.
-
El primer bloque [Repetir hasta] es el primer bucle interno.
-
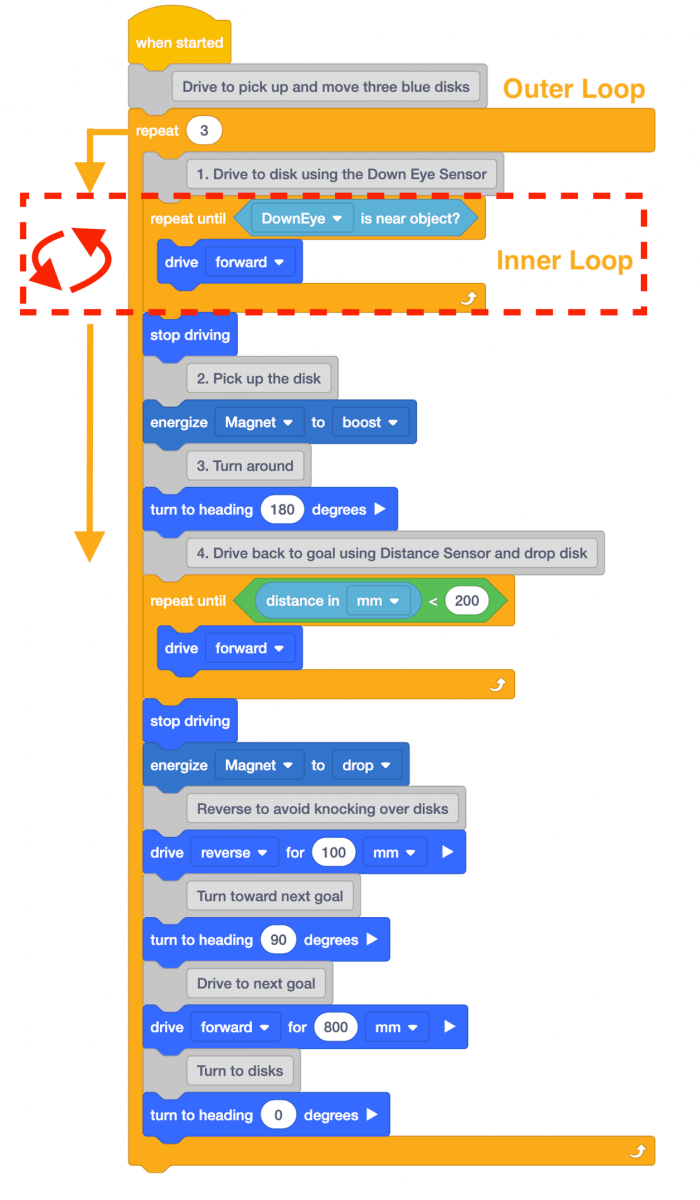
El primer bucle interno se ejecutará hasta que la condición se informe como VERDADERA. El proyecto se separará del primer bucle interno y comenzará a moverse a través del resto de los bloques dentro del bucle externo.
-
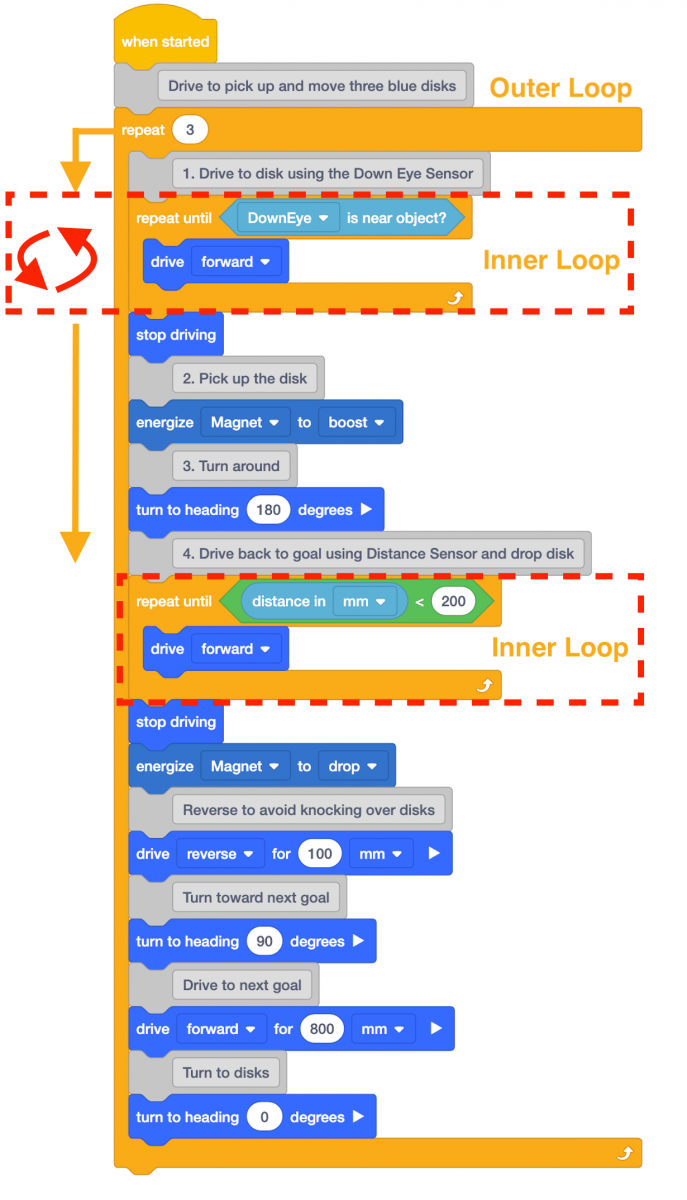
Esto continúa hasta que comience el segundo bloque [Repetir hasta]. Este es el segundo bucle interno.
-
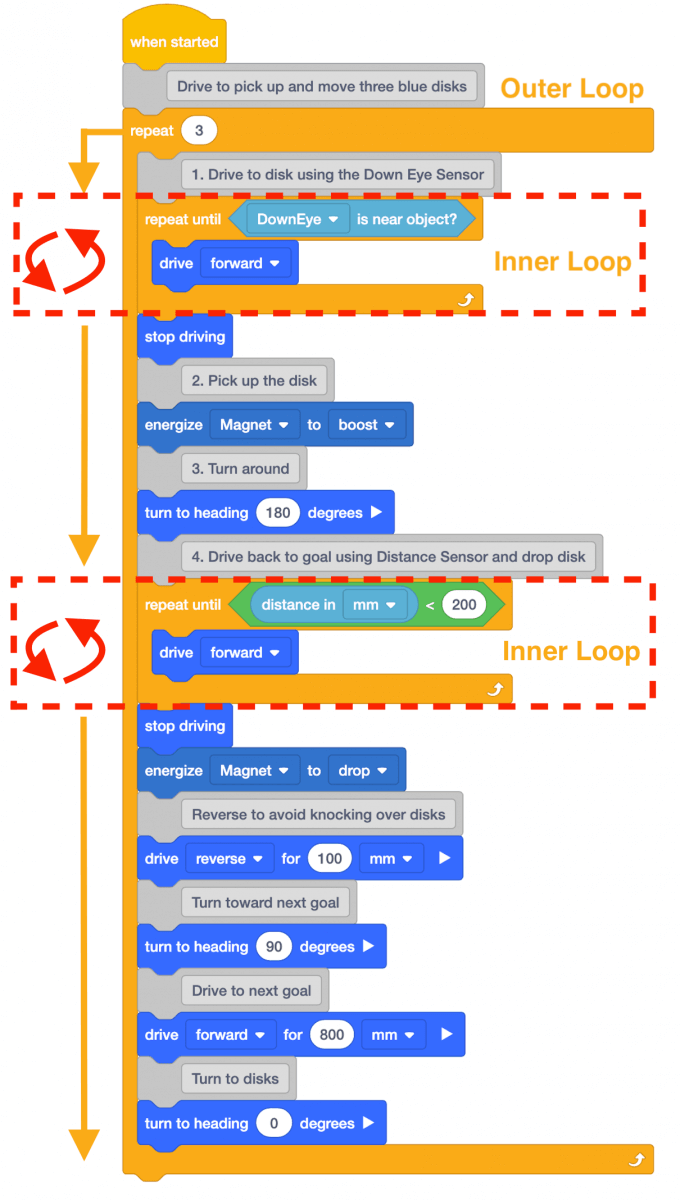
Los bloques dentro del segundo bucle interno se repetirán hasta que se cumpla la condición del bloque. El proyecto se separará del segundo bucle interior y comenzará a moverse a través del resto de los bloques dentro del bucle exterior.
-
Una vez que todos los bloques en el bucle exterior están completos, el proyecto vuelve al principio del bucle exterior y repite el proceso de nuevo.
Preguntas
Seleccione un enlace a continuación para acceder al cuestionario de la lección.
Google Doc / .docx / .pdf