บทเรียนที่ 4: การไหลของโปรเจกต์ด้วยลูปที่ซ้อนกัน
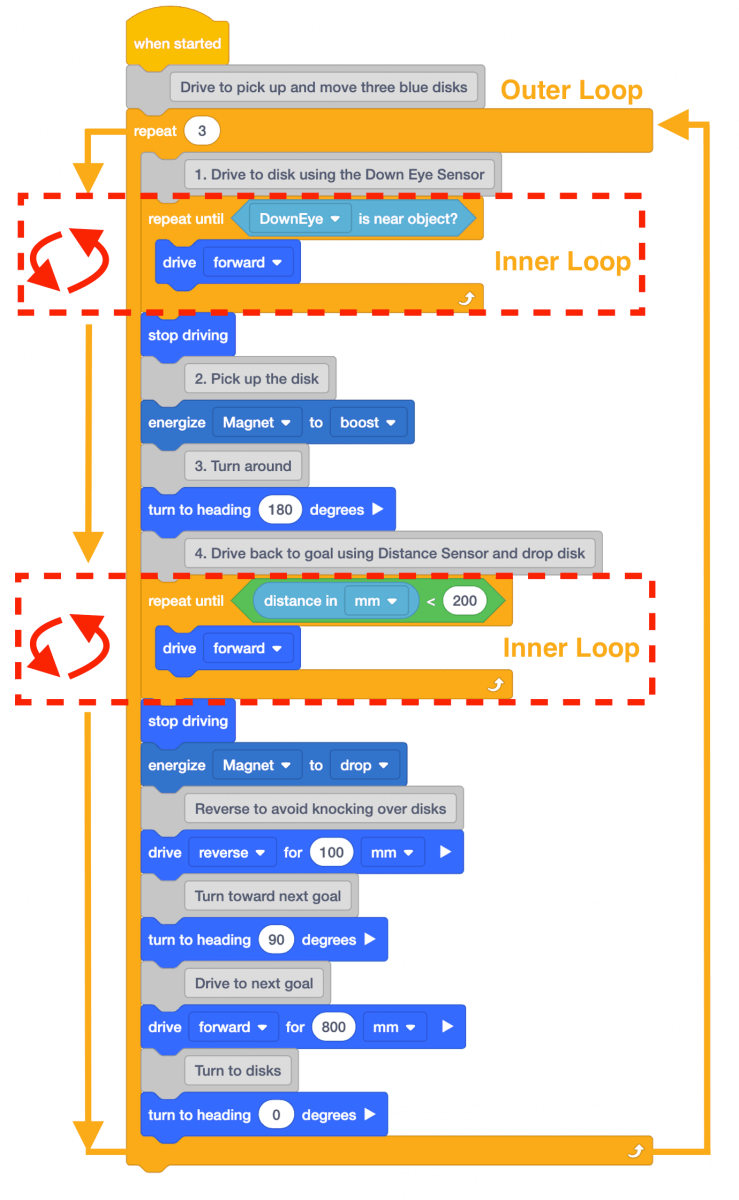
ด้วยลูปที่ซ้อนกันการไหลของโครงการอาจดูล้นหลาม โครงการเริ่มต้นด้วยการตรวจสอบการทำซ้ำหรือเงื่อนไขของวงรอบนอกแล้วเรียกใช้วงรอบในเพื่อ
เริ่มต้นวงในดำเนินการจนกว่าการทำซ้ำทั้งหมดจะเสร็จสมบูรณ์หรือตรงตามเงื่อนไขก่อนที่จะกลับไปที่วงนอก รอบนี้จะทำซ้ำจนกว่าการทำซ้ำทั้งหมดของวงรอบนอกจะเสร็จสมบูรณ์หรือจนกว่าจะตรงตามเงื่อนไขของวงรอบนอก
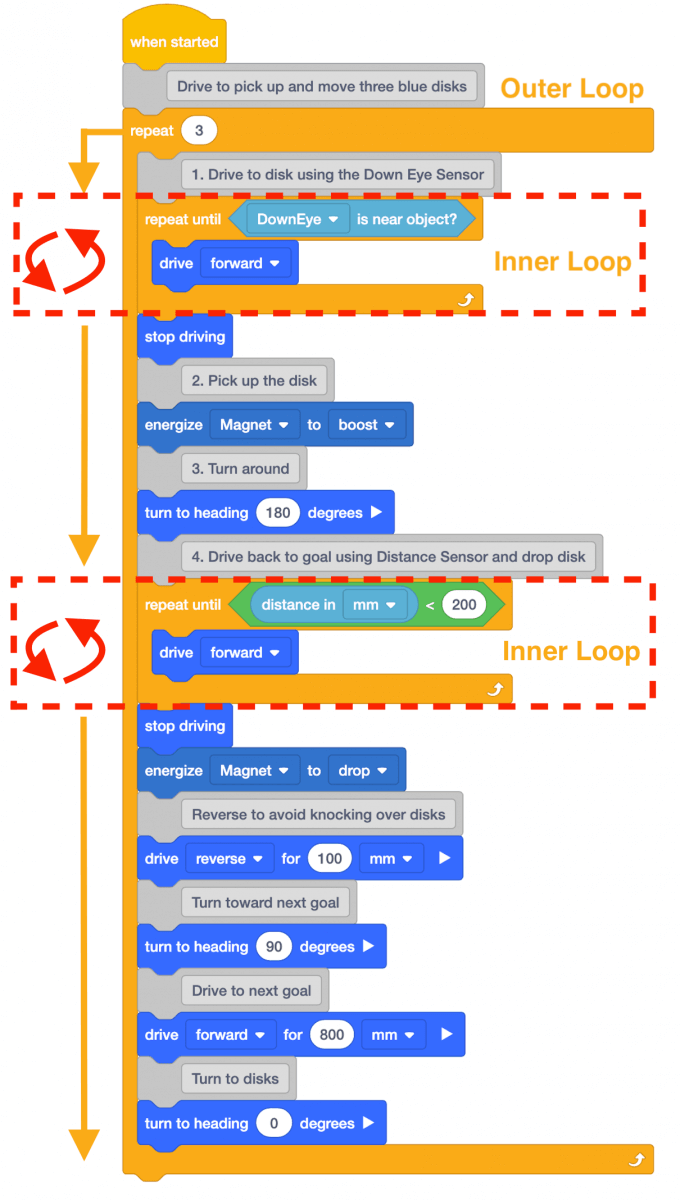
ในตัวอย่างด้านล่างโครงการจะเริ่มต้นด้วยการเริ่มต้นการทำซ้ำครั้งแรกของวงรอบนอก ในกรณีนี้ลูปด้านนอกจะทำซ้ำสามครั้ง
-
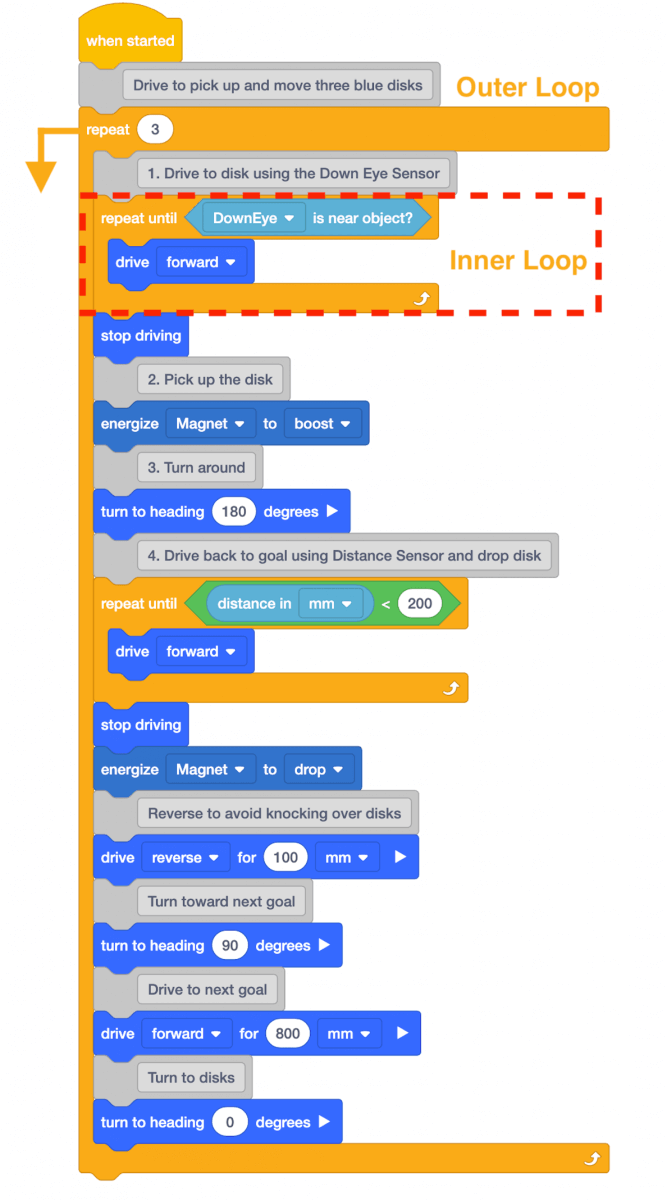
บล็อกแรก [ทำซ้ำจนกว่าจะถึง] คือวงในวงแรก
-
วงในวงแรกจะทำงานจนกว่าเงื่อนไขจะถูกรายงานว่าเป็นจริง จากนั้นโปรเจกต์จะหยุดพักจากวงในวงแรกและเริ่มเคลื่อนที่ผ่านส่วนที่เหลือของบล็อกภายในวงนอก
-
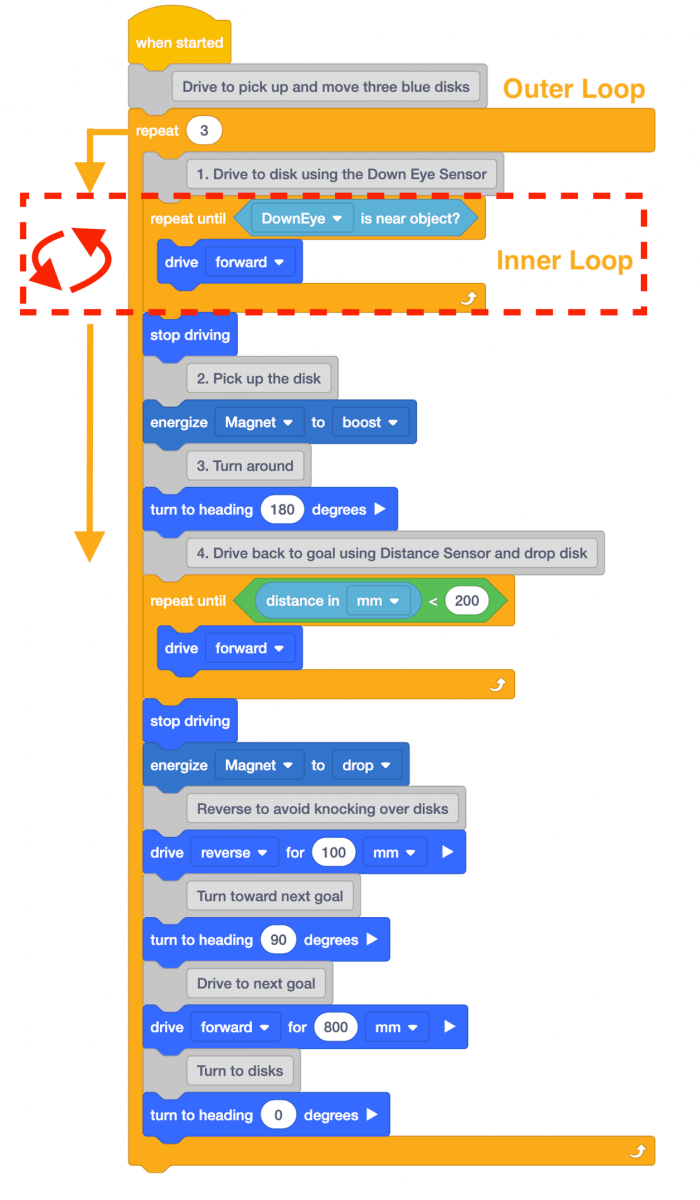
สิ่งนี้จะดำเนินต่อไปจนกว่าบล็อกที่สอง [ทำซ้ำจนกว่า] จะเริ่มขึ้น นี่คือวงในวงที่สอง
-
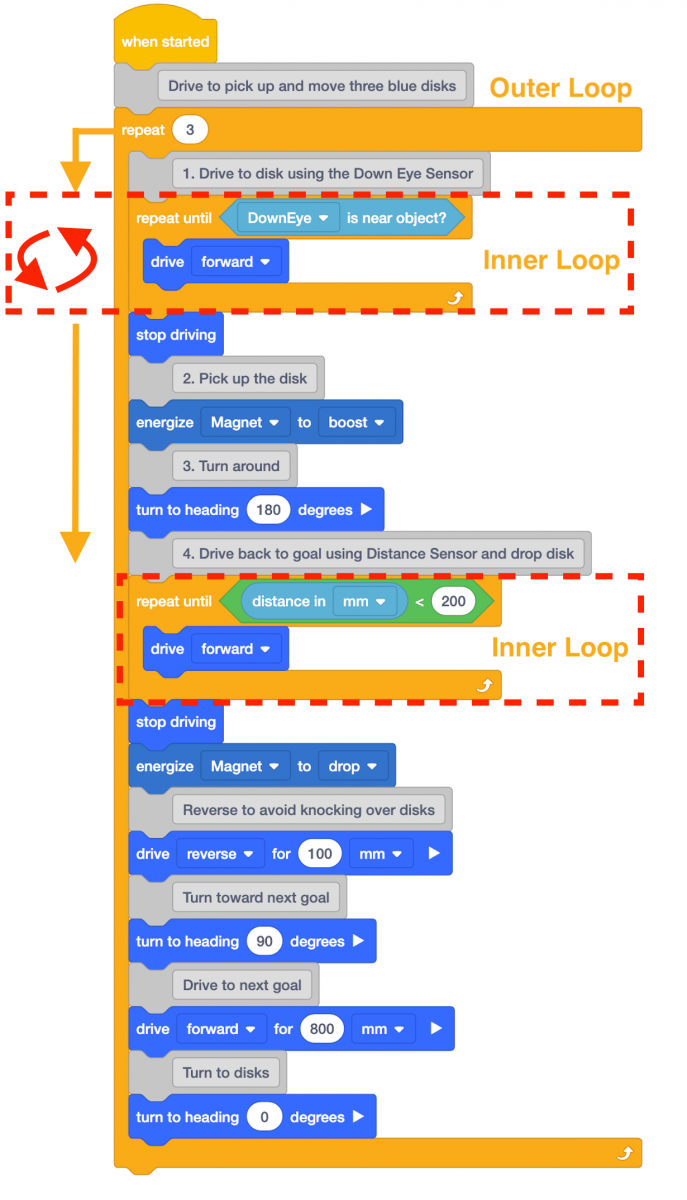
บล็อกด้านในของลูปด้านในที่สองจะทำซ้ำจนกว่าจะตรงตามเงื่อนไขของบล็อก จากนั้นโครงการจะหยุดพักจากวงในที่สองและเริ่มเคลื่อนที่ผ่านส่วนที่เหลือของบล็อกภายในของวงนอก
-
เมื่อบล็อกทั้งหมดในวงรอบนอกเสร็จสิ้นโครงการจะกลับไปที่จุดเริ่มต้นของวงรอบนอกและทำซ้ำกระบวนการอีกครั้ง