
الدرس الأول: مقدمة عن قلادة التدريس
في الوحدة السابقة، استكشفت كيفية تحريك الذراع الروبوتية المكونة من 6 محاور يدويًا على طول المحاور x وy وz. لقد تعلمت كيفية استخدام Teach Pendant في VEXcode EXP لتمكين الحركة اليدوية وجمع إحداثيات (x, y, z).
في هذا الدرس، سوف تتعلم المزيد عن Teach Pendant، بما في ذلك:
- كيف يتم استخدام المعلقات التعليمية في الروبوتات الصناعية؟
- الميزات الرئيسية لـ Teach Pendant في VEXcode EXP.
- كيفية تحريك الذراع المكون من 6 محاور باستخدام Teach Pendant.
بحلول نهاية هذا الدرس، سوف تكون قادرًا على استخدام Teach Pendant لتحريك ذراع المحاور الستة بشكل تدريجي على طول المحاور x وy وz.
قلادة التدريس في VEXcode EXP
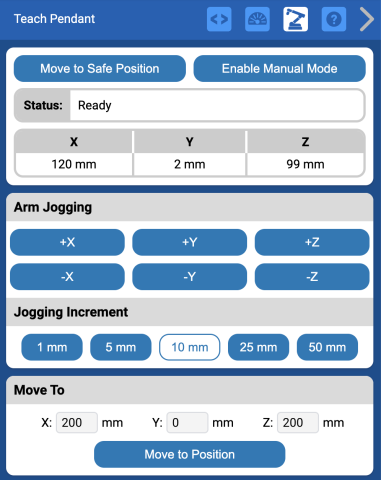
تحتوي Teach Pendant في VEXcode EXP على العديد من الميزات المفيدة التي يمكنك استخدامها للتحكم في الذراع ذي المحاور الستة. سوف يركز هذا الدرس على الميزات التي ستستخدمها في هذه الوحدة.
ما هي قلادة التدريس؟
القلادة التعليمية هي جهاز يستخدم بشكل شائع في الروبوتات الصناعية والذي يسمح للمستخدم بالتحكم في الذراع الروبوتية عن بعد وبشكل يدوي. يمكن استخدام المعلقات التعليمية لتنفيذ سلسلة من الحركات واختبارها وتحسينها بحيث تكون دقيقة. إنه يسمح للمستخدم بمراقبة الروبوت في الوقت الحقيقي، واستكشاف المشكلات وإصلاحها عند ظهورها، ويلعب دورًا مهمًا في مجال السلامة من خلال تمكين المستخدم من العمل مع الروبوت من مسافة بعيدة.

لوحة معلومات تعليم القلادة
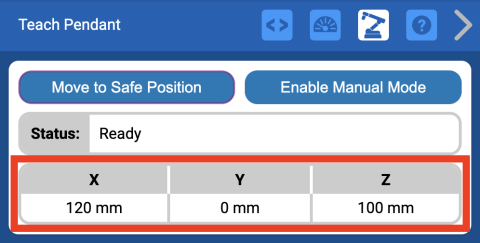
يمكن رؤية إحداثيات x وy وz للذراع المكون من 6 محاور في الوقت الفعلي على لوحة معلومات Teach Pendant. لقد استخدمت هذه الميزة عند جمع إحداثيات أرقام البلاط المحددة في الوحدة السابقة.
ستظل لوحة المعلومات في مكانها أعلى Teach Pendant في جميع الأوقات، حتى أثناء التمرير لاستخدام ميزات أخرى في Teach Pendant، كما هو موضح في هذا الفيديو.
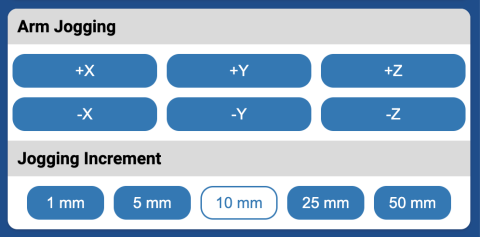
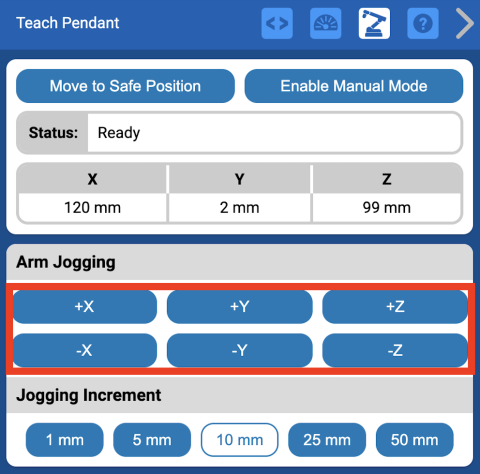
الركض بالذراع
يتيح لك Teach Pendant تحريك ذراع المحاور الستة على طول المحاور x وy وz بزيادات صغيرة. هذا ما يسمى بالركض.
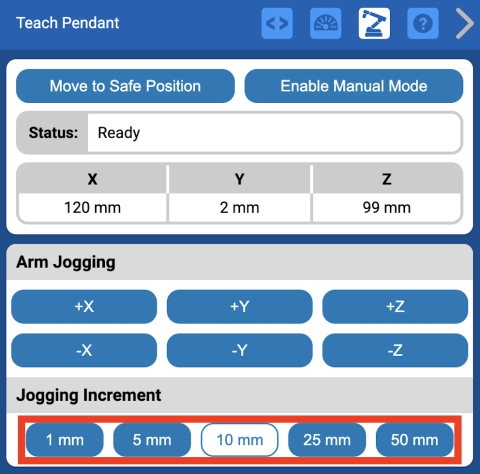
يمكنك أيضًا تغيير زيادة الحركة عند الركض.
سوف تتعلم المزيد عن الركض لاحقًا في هذا الدرس.
مغناطيس
توفر قلادة التدريس أيضًا أزرارًا يمكن استخدامها لتشغيل المغناطيس وإطلاقه.
ستستخدم هذه الأزرار في الدرس الثاني من هذه الوحدة لالتقاط الأقراص وتحريكها باستخدام الذراع المكون من 6 محاور.

تحريك الذراع ذي الستة محاور باستخدام قلادة التدريس
يمكن استخدام الركض لتحريك الذراع المكون من 6 محاور بشكل تدريجي من موضع إلى آخر. يعد هذا مفيدًا عندما تريد تغيير موضع الذراع المكون من 6 محاور قليلاً. يمكن أن يسمح لك هذا بتحديد موضع الذراع ذي الستة محاور بدقة أكبر.
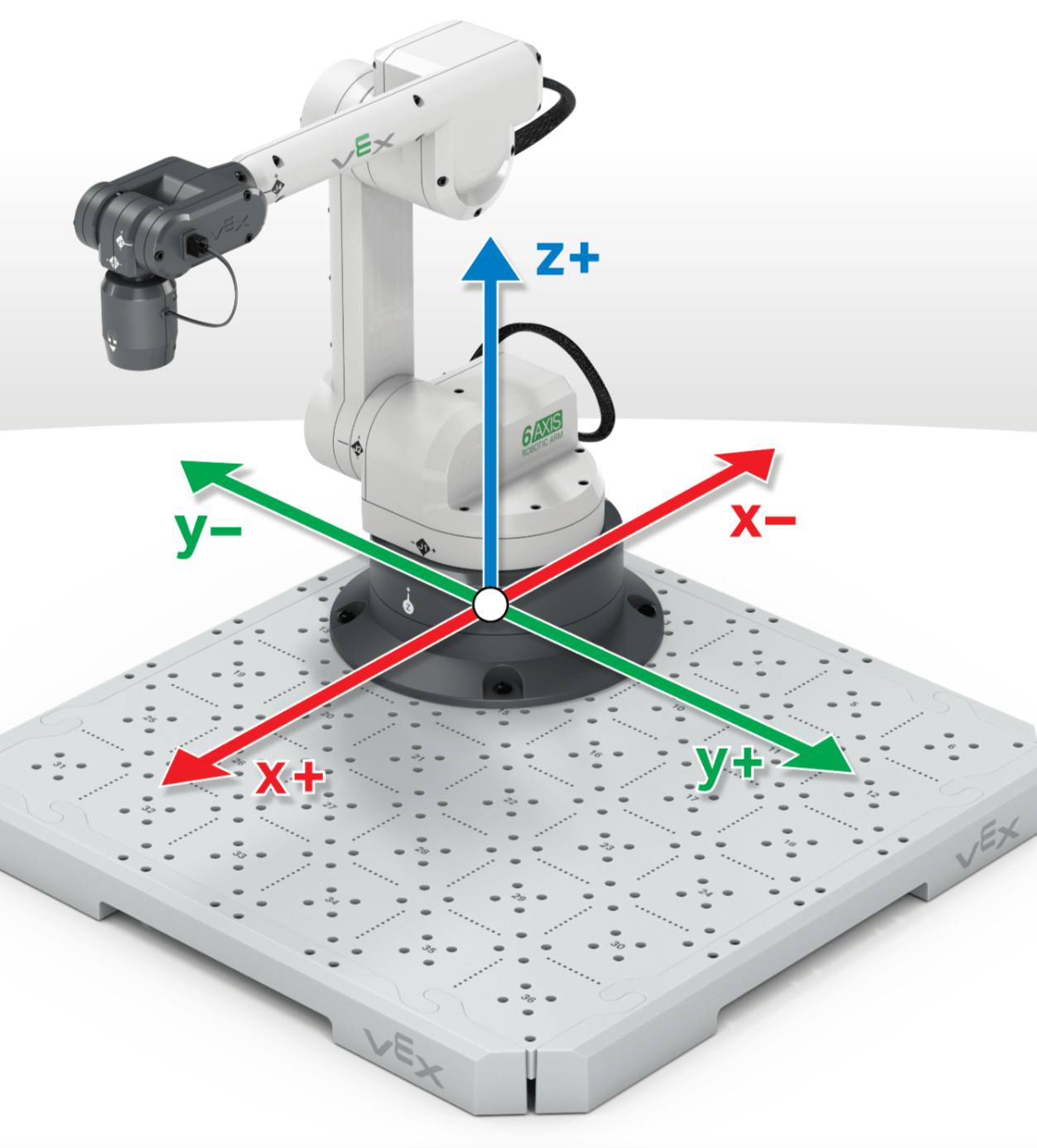
بإمكانك تحريك الذراع المكون من 6 محاور على طول أحد المحاور الثلاثة عن طريق تحديد أزرار المحاور المرتبطة من Teach Pendant. شاهد هذا الفيديو لرؤية مثال على الركض بذراع 6 محاور باستخدام Teach Pendant. في الفيديو، يتم الضغط على الأزرار الإيجابية والسلبية لكل محور. يتحرك الذراع المكون من 6 محاور بعيدًا عن القاعدة عند الضغط على الأزرار الموجبة، ثم يعود نحو القاعدة عند الضغط على الأزرار السالبة على كل محور.
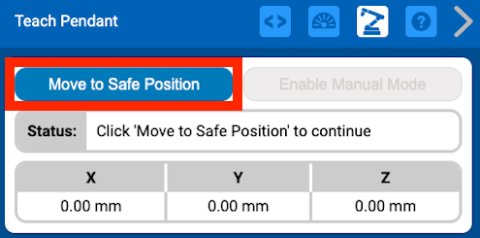
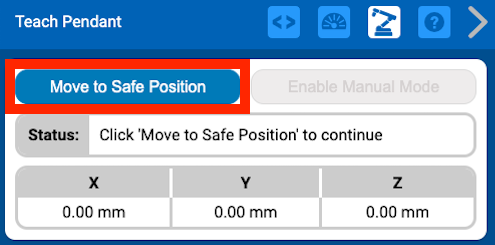
حدد الانتقال إلى الوضع الآمن لتمكين ميزة الركض في Teach Pendant.
سيتم تعطيل قلادة التدريس حتى يتم تحديد الانتقال إلى الوضع الآمن .
يمكنك استخدام أزرار تحريك الذراع لتحريك الذراع ذي الستة محاور بشكل تدريجي على طول المحور x أو y أو z.
سوف تقوم بالتدرب على الركض باستخدام الذراع ذات المحاور الستة لاحقًا في هذا الدرس.
يمكنك تغيير الزيادة التدريجية لزيادة أو تقليل كل حركة تدريجية يتم تحريك الذراع ذات المحاور الستة بها.
الزيادة الافتراضية هي 10 ملم (مم).
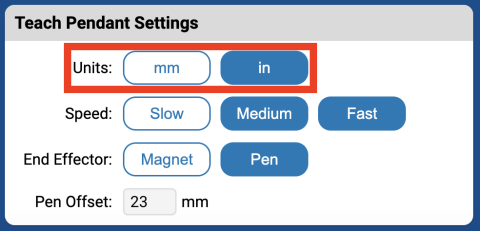
يمكنك أيضًا تغيير الوحدات المعروضة في Teach Pendant من المليمترات (مم) إلى البوصات (بوصة)، في قسم إعدادات Teach Pendant. تتواجد إعدادات Teach Pendant في الجزء السفلي من Teach Pendant.
يؤدي هذا إلى تغيير وحدات الإحداثيات في لوحة معلومات Teach Pendant بالإضافة إلى خيارات زيادة
الركض.
تمرين الركض باستخدام الذراع ذات المحاور الستة
الآن بعد أن تعرفت على ما هو الركض، سوف تقوم بالتدرب على الركض باستخدام الذراع ذات المحاور الستة .
تأكد من أن الذراع المكون من 6 محاور متصل بجهاز VEXcode، وأن Teach Pendant مفتوح.
حدد الانتقال إلى الوضع الآمن لتمكين قلادة التدريس.
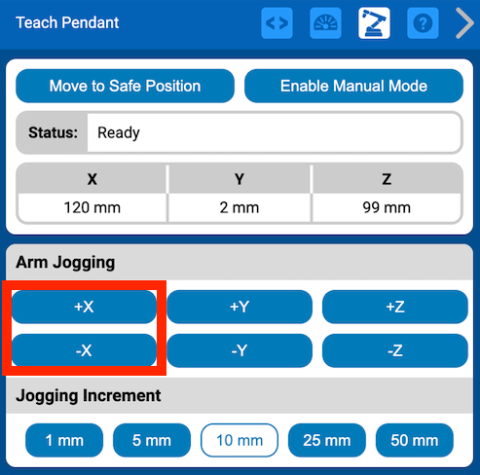
أولاً، قم بالتدرب على الركض على طول المحور السيني. قم بتحديد الأزرار – X و + X في Teach Pendant. لاحظ كيف يتحرك الذراع ذو الستة محاور في كل مرة يتم الضغط على الزر.
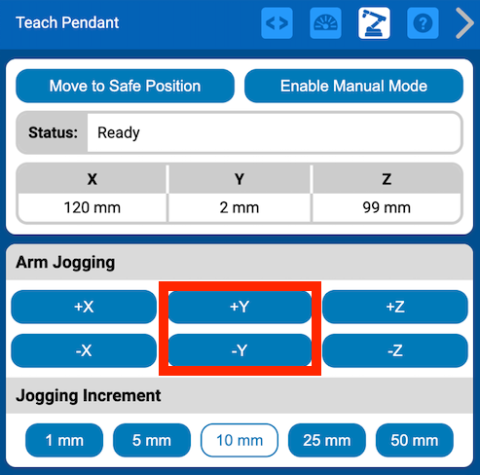
بعد ذلك، قم بالتدرب على الركض على طول المحور y. حدد الأزرار – Y و + Y في Teach Pendant. لاحظ كيف يتحرك الذراع ذو الستة محاور في كل مرة يتم الضغط على الزر.
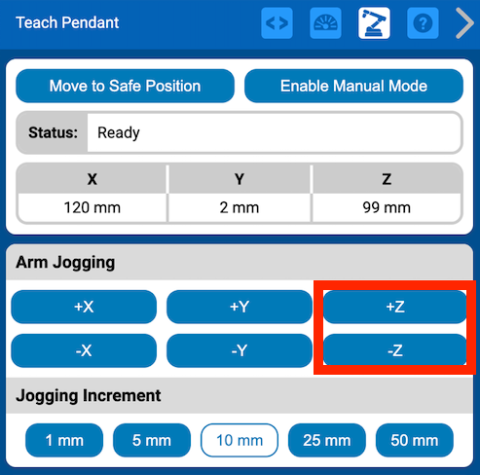
الآن، قم بالتدرب على الركض على طول المحور Z. حدد الأزرار – Z و + Z في Teach Pendant. لاحظ كيف يتحرك الذراع ذو الستة محاور في كل مرة يتم الضغط على الزر.
نشاط
الآن بعد أن تعلمت كيفية الركض باستخدام ذراع المحاور الستة، سوف تتدرب على الركض على طول المحاور x وy وz.
في هذا النشاط، سوف تتدرب على تحريك الذراع ذات المحاور الستة على طول كل محور. أثناء تحريك الذراع المكون من 6 محاور، سوف تسجل كيفية تغير قيم x وy وz في لوحة معلومات Teach Pendant.
تأكد من أن الذراع المكون من 6 محاور متصل بـ VEXcode EXP، وأنه تم تحديد الانتقال إلى الوضع الآمن قبل محاولة تحريك الذراع المكون من 6 محاور.
اتبع كل خطوة وسجل إجاباتك على الأسئلة في دفتر الهندسة الخاص بك:
المحور X:
- قم بوضع الذراع المكون من 6 محاور مع نقطة مركز الأداة (TCP) أعلى الرقم 32 على البلاطة.
- قم بتحريكه حتى يتم وضع TCP فوق الرقم 20 عن طريق تحريك الذراع المكون من 6 محاور.
- قم بإرجاع ذراع المحاور الستة إلى الرقم 32.
- أجب عن السؤال التالي في دفتر الهندسة الخاص بك: كيف تتغير قيمة x في لوحة معلومات Teach Pendant أثناء تحريك الذراع ذي الستة محاور؟
المحور Y:
- قم بوضع الذراع المكون من 6 محاور مع نقطة مركز الأداة (TCP) أعلى الرقم 12 على البلاطة.
- قم بتحريكه حتى يتم وضع TCP فوق الرقم 10 عن طريق تحريك الذراع المكون من 6 محاور.
- قم بإرجاع ذراع المحاور الستة إلى الرقم 12.
- أجب عن السؤال التالي في دفتر الهندسة الخاص بك: كيف تتغير قيمة y في لوحة معلومات Teach Pendant أثناء تحريك الذراع ذي الستة محاور؟
المحور Z:
- قم بوضع الذراع المكون من 6 محاور مع نقطة مركز الأداة (TCP) أعلى الرقم 29 على البلاطة.
- قم بتحريكه لأعلى بحيث يصبح TCP على بعد حوالي 70 مم من البلاط عن طريق تحريك الذراع المكون من 6 محاور.
- قم بتحريك ذراع المحاور الستة للأسفل إلى موضعها الأصلي التقريبي فوق الرقم 29.
- أجب عن السؤال التالي في دفتر الهندسة الخاص بك: كيف تتغير قيمة z في لوحة معلومات Teach Pendant أثناء تحريك الذراع ذي الستة محاور؟
تحقق من فهمك
قبل البدء بالدرس التالي، تأكد من فهمك للمفاهيم الموجودة في هذا الدرس من خلال الإجابة على الأسئلة الموجودة في المستند أدناه في دفتر الهندسة الخاص بك.
تحقق من أسئلة الفهم الخاصة بك > (Google Doc / .docx / .pdf)
حدد التالي > لمعرفة المزيد عن المؤثرات النهائية.